
车辆的行驶轨迹控制装置.pdf

明钰****甜甜


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆的行驶轨迹控制装置.pdf
一种车辆的行驶轨迹控制装置,计算用于以追随目标轨迹的方式使车辆(12)行驶的与前轮的目标转向角对应的目标转向角(θlkat)(S100),基于目标转向角(θlkat),通过转向角可变装置(30)及动力转向装置(22)来控制前轮的转向角(S700),由此进行车辆的行驶轨迹控制,判定驾驶员的驾驶技能和轨迹变更意图的至少一方(S400),基于驾驶技能指标值(Iskill)和表示驾驶员的轨迹变更的意图的强弱的指标值(Iwill)的至少一方来可变地设定行驶轨迹控制中的增益,由此可变地设定车辆对目标轨迹的追随性(S5
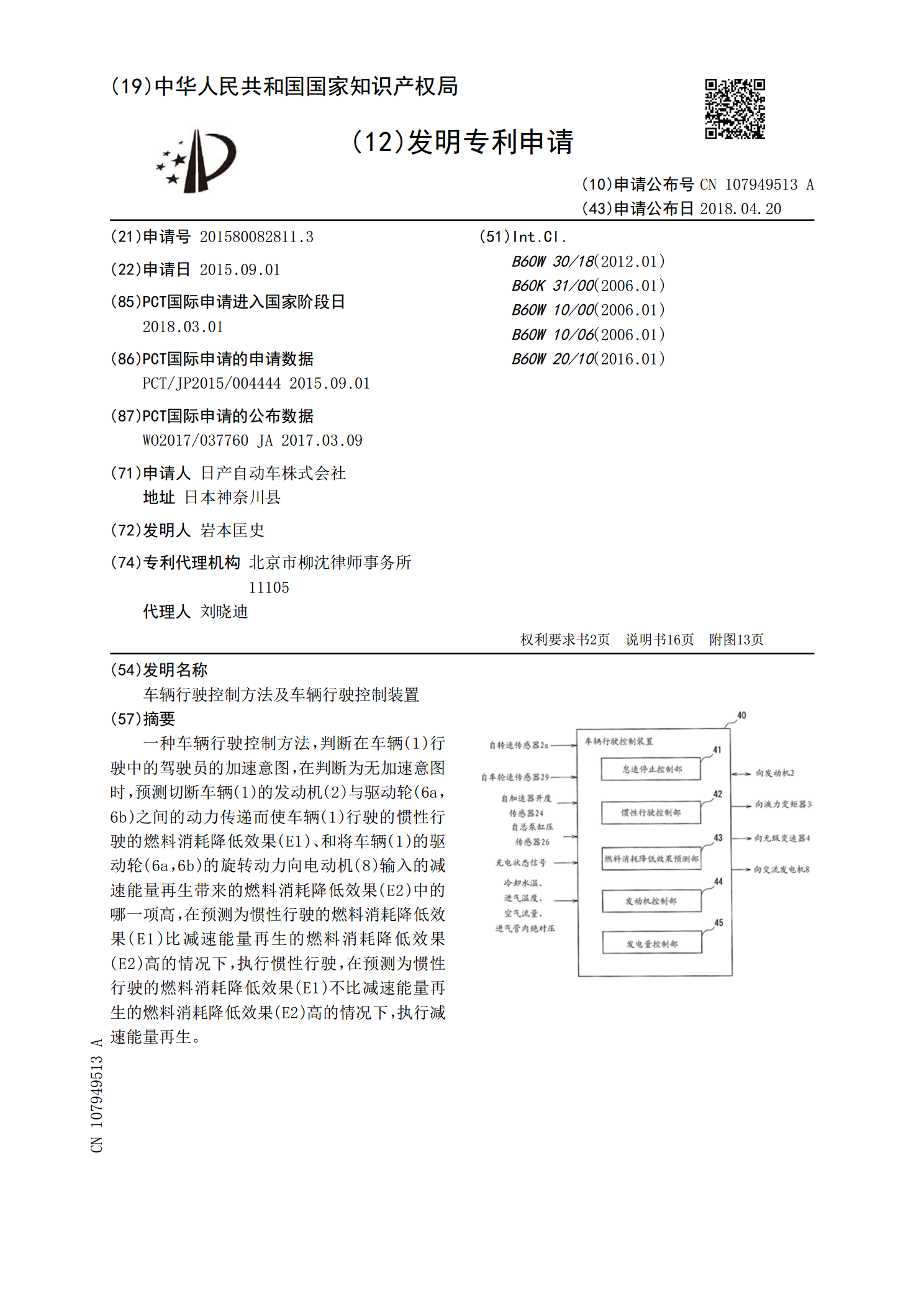
车辆行驶控制方法及车辆行驶控制装置.pdf
一种车辆行驶控制方法,判断在车辆(1)行驶中的驾驶员的加速意图,在判断为无加速意图时,预测切断车辆(1)的发动机(2)与驱动轮(6a,6b)之间的动力传递而使车辆(1)行驶的惯性行驶的燃料消耗降低效果(E1)、和将车辆(1)的驱动轮(6a,6b)的旋转动力向电动机(8)输入的减速能量再生带来的燃料消耗降低效果(E2)中的哪一项高,在预测为惯性行驶的燃料消耗降低效果(E1)比减速能量再生的燃料消耗降低效果(E2)高的情况下,执行惯性行驶,在预测为惯性行驶的燃料消耗降低效果(E1)不比减速能量再生的燃料消耗降
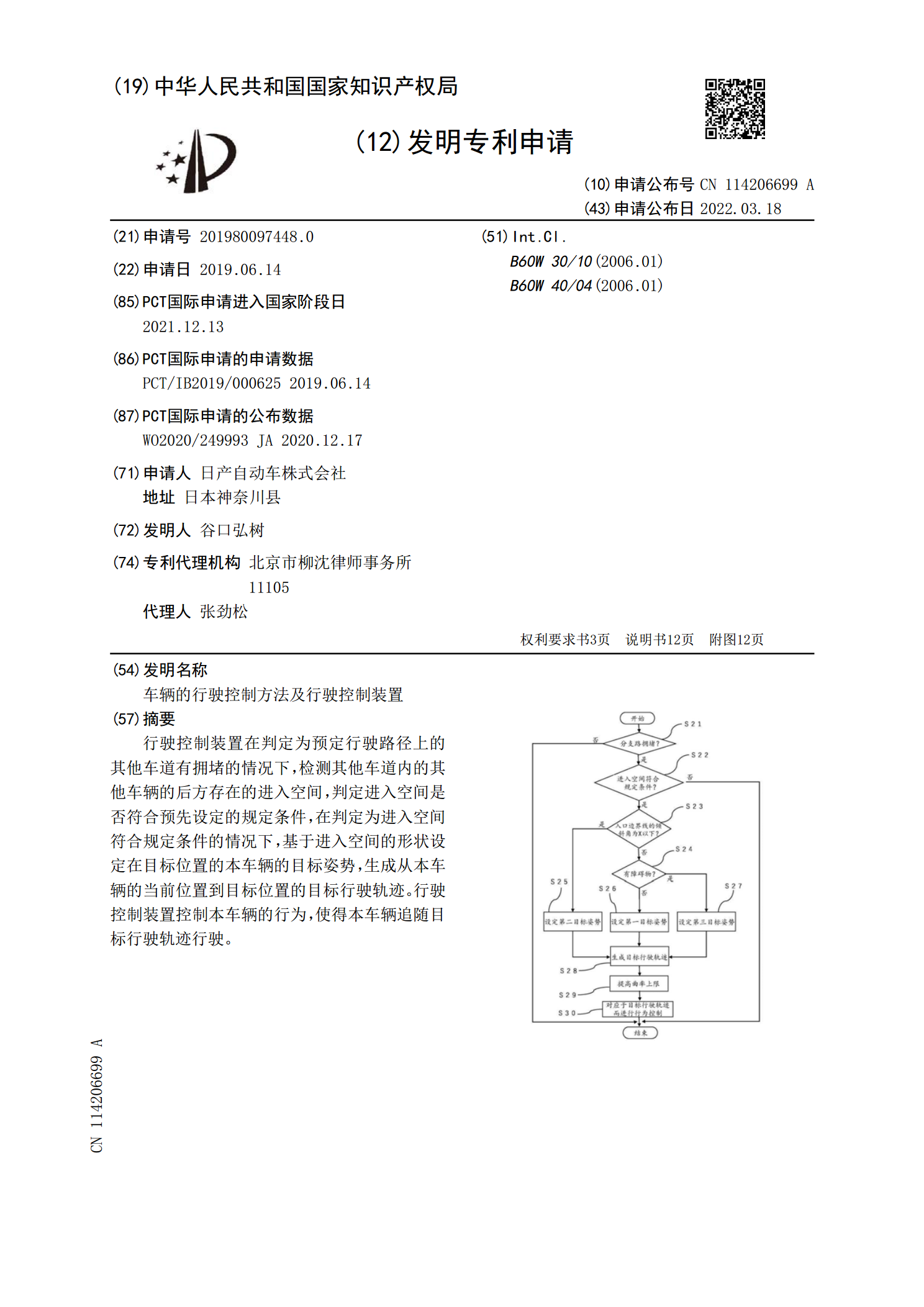
车辆的行驶控制方法及行驶控制装置.pdf
行驶控制装置在判定为预定行驶路径上的其他车道有拥堵的情况下,检测其他车道内的其他车辆的后方存在的进入空间,判定进入空间是否符合预先设定的规定条件,在判定为进入空间符合规定条件的情况下,基于进入空间的形状设定在目标位置的本车辆的目标姿势,生成从本车辆的当前位置到目标位置的目标行驶轨迹。行驶控制装置控制本车辆的行为,使得本车辆追随目标行驶轨迹行驶。

车辆行驶控制装置.pdf
本发明公开了一种车辆行驶控制装置,其执行转弯辅助控制和车辆动力学控制,所述转弯辅助控制控制车轮纵向力使得转弯路径内侧车轮的纵向力小于转弯路径外侧车轮的纵向力,并且所述车辆动力学控制控制车辆纵向力以使得车辆的转弯运动稳定。允许转弯辅助控制的车速范围低于允许车辆动力学控制的车速范围。

车辆行驶控制装置.pdf
一种车辆行驶控制装置(1)至少包括:转角可变单元(200、300),所述转角可变单元能够使转向角与转角之间的关系发生变化,所述转向角是转向输入轴(12)的旋转角,所述转角是转向轮(FL、FR)的旋转角;以及轨迹控制单元(100),所述轨迹控制单元控制转角可变单元,以使车辆(10)的轨迹接近所述车辆的目标行驶道路。所述车辆行驶控制单元还包括改变单元(100),当车辆的驾驶者经由转向盘(11)对转向输入轴有转向输入时,所述改变单元改变轨迹控制单元的控制响应性。