
车辆的控制装置和车辆的控制方法.pdf

是你****松呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共49页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆控制方法、车辆控制装置和车辆.pdf
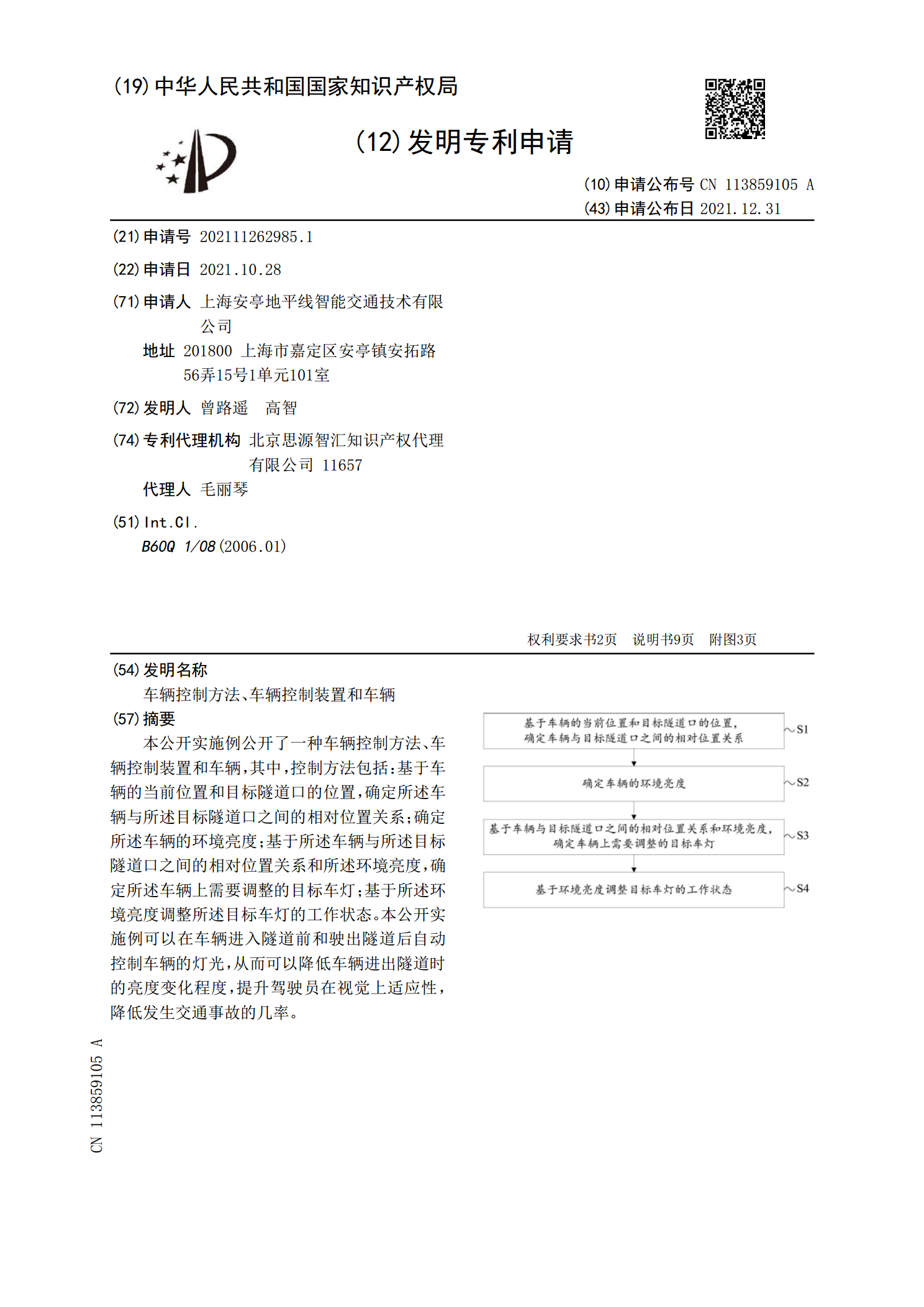
本公开实施例公开了一种车辆控制方法、车辆控制装置和车辆,其中,控制方法包括:基于车辆的当前位置和目标隧道口的位置,确定所述车辆与所述目标隧道口之间的相对位置关系;确定所述车辆的环境亮度;基于所述车辆与所述目标隧道口之间的相对位置关系和所述环境亮度,确定所述车辆上需要调整的目标车灯;基于所述环境亮度调整所述目标车灯的工作状态。本公开实施例可以在车辆进入隧道前和驶出隧道后自动控制车辆的灯光,从而可以降低车辆进出隧道时的亮度变化程度,提升驾驶员在视觉上适应性,降低发生交通事故的几率。

车辆控制装置和车辆控制方法.pdf
本发明提供一种车辆控制装置,其包括:第一控制单元(55、S12、S13)和第二控制单元(55)。第一控制单元允许发动机(12)在发动机(12)的停机条件满足时自动停机并且允许发动机(12)在发动机(12)的重新起动条件满足时重新起动。当在允许发动机(12)重新起动之后检测到发动机(12)的起动故障时,第二控制单元(55、S32、S33)执行第一制动控制以增大车轮(FR、FL、RR、RL)的制动力。然后,第二控制单元执行第二制动控制,以保持车轮(FR、FL、RR、RL)的制动力。第一控制单元(55、S12、

车辆的控制装置和车辆的控制方法.pdf
在本发明的车辆的控制装置中,根据由车轮速度传感器检测出的车轮速度的规定频率区域中的信息来估计簧上状态,对致动器进行控制以使该簧上状态成为目标簧上状态,并且根据车体俯视模型运算各车轮的基准车轮速度。而且,在比出现簧上运动状态的上述规定频率区域低的低频侧的上述各车轮的基准车轮速度间的差分为规定值以上的情况下,检测为簧上状态估计可靠度下降了,与估计可靠度未下降的情况相比,执行被限制的致动器姿势控制单元的控制。

车辆的控制装置和车辆的控制方法.pdf
具有检测车轮速度的传感器,控制器根据由传感器检测出的车轮速度的规定频率区域中的信息来估计簧上状态,对摩擦制动器进行控制使得该簧上状态成为目标簧上状态,并且在簧上状态的估计可靠度下降的情况下,使摩擦制动器的控制量下降。

车辆控制装置和车辆控制方法.pdf
本发明涉及一种用于车辆的车辆控制装置和车辆控制方法,该车辆包括:内燃发动机;在驱动轮上产生驱动力的车辆驱动用旋转电机;以及向车辆驱动用旋转电机供应电力的蓄电装置,所述内燃发动机(120)包括排气通路(124)、设置在排气通路(124)中的催化剂(124B)以及利用来自蓄电装置(220)的电力来加热催化剂(124B)的加热装置(124E)。车辆控制包括:判定是否满足驱动轮(160)的状态在打滑状态和抓地状态之间改变的执行条件;以及如果满足所述执行条件,则执行用于使由所述车辆驱动用旋转电机产生的电力被所述加热