
一种轮腿模式可切换机器人.pdf

爱欢****23


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮腿模式可切换机器人.pdf
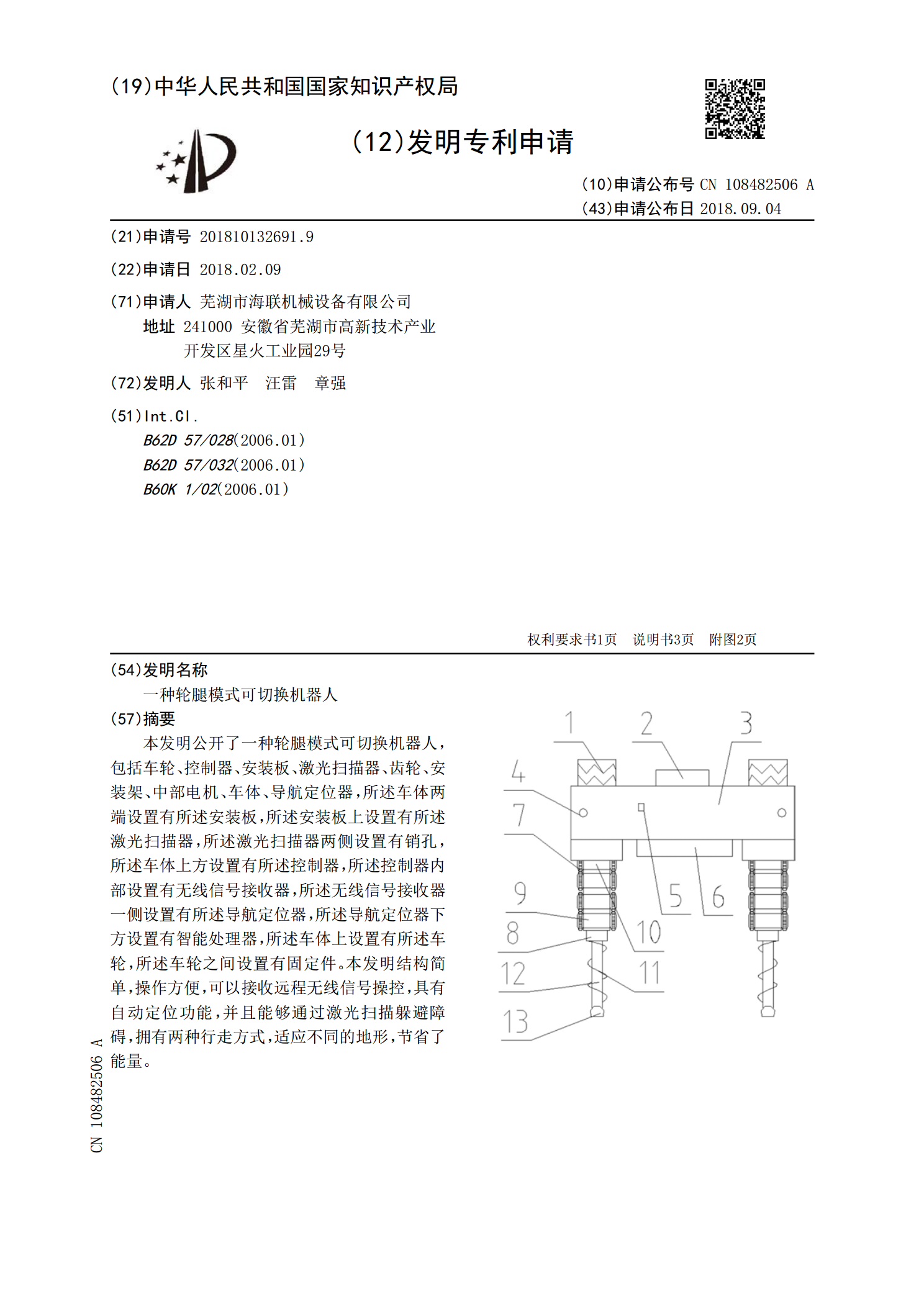
本发明公开了一种轮腿模式可切换机器人,包括车轮、控制器、安装板、激光扫描器、齿轮、安装架、中部电机、车体、导航定位器,所述车体两端设置有所述安装板,所述安装板上设置有所述激光扫描器,所述激光扫描器两侧设置有销孔,所述车体上方设置有所述控制器,所述控制器内部设置有无线信号接收器,所述无线信号接收器一侧设置有所述导航定位器,所述导航定位器下方设置有智能处理器,所述车体上设置有所述车轮,所述车轮之间设置有固定件。本发明结构简单,操作方便,可以接收远程无线信号操控,具有自动定位功能,并且能够通过激光扫描躲避障碍,

一种轮腿模式可切换机器人.pdf
本发明涉及一种轮腿模式可切换机器人,其技术特点是:在车体两侧长边对称安装有四条结构完全相同的腿和四个车轮,在车体内安装有车轮电机驱动装置用于驱动四个车轮,每条腿均包括弧形连接架、大腿、小腿和脚,小腿底部安装在脚上,小腿顶部安装在大腿两部分之间,在大腿上安装有大腿驱动装置和小腿驱动装置,弧形连接架安装在车体和大腿之间,该弧形连接架由安装在车体侧边的弧形连接架电机驱动并可绕车轮旋转。本发明将轮式机器人与足式机器人结合在一起,可以根据实际情况有效地选择不同的行走方式,以达到提高移动速度,降低机器人能量损耗,提高

轮腿机器人及轮腿的智能切换方法.pdf
本发明涉及轮腿机器人及轮腿的智能切换方法,机器人检测并计算要行走路况前后、左右倾斜情况,并与对应的设定倾斜范围进行比较,以判断是否进行行走方式的切换,若是需要进行切换,则通过舵机控制器控制各舵机动作进行轮腿切换,若是无需切换,则继续先前的行走方式继续行进;本发明无需操作者手眼高度精准的配合,也无需实时跟踪进行操作,且若是机器人在行进过程中遇到路况的改变能够自动进行轮腿的切换,顺利到达既定目标,提高了机器人的智能化。

一种可翻转的轮腿式机器人.pdf
本发明公开了一种可翻转的轮腿式机器人,包括机器人车体,所述机器人车体的前侧设置有前盖,密封板的表面安装有前轮组件,侧盖的内壁安装有电机,电机的外侧连接有输出轴,输出轴的外部安装有轮腿组件,前轮组件包括有前轮直臂、前轮侧臂、第一螺栓、第二螺栓、U形轮臂连接件和万向轮,轮腿组件包括有联轴器、弧形单足、T字连接件、轮齿和螺丝。本发明将弧形足式结构的轮腿组件与固定式的前轮组件结合起来,既具有轮式机器人的灵活性,又具有腿式机器人的高越障性能,采用上下完全对称性的结构,使得机器人正反面可随时互换,避免了在非常复杂的地
一种可两用的轮腿式机器人腿结构.pdf
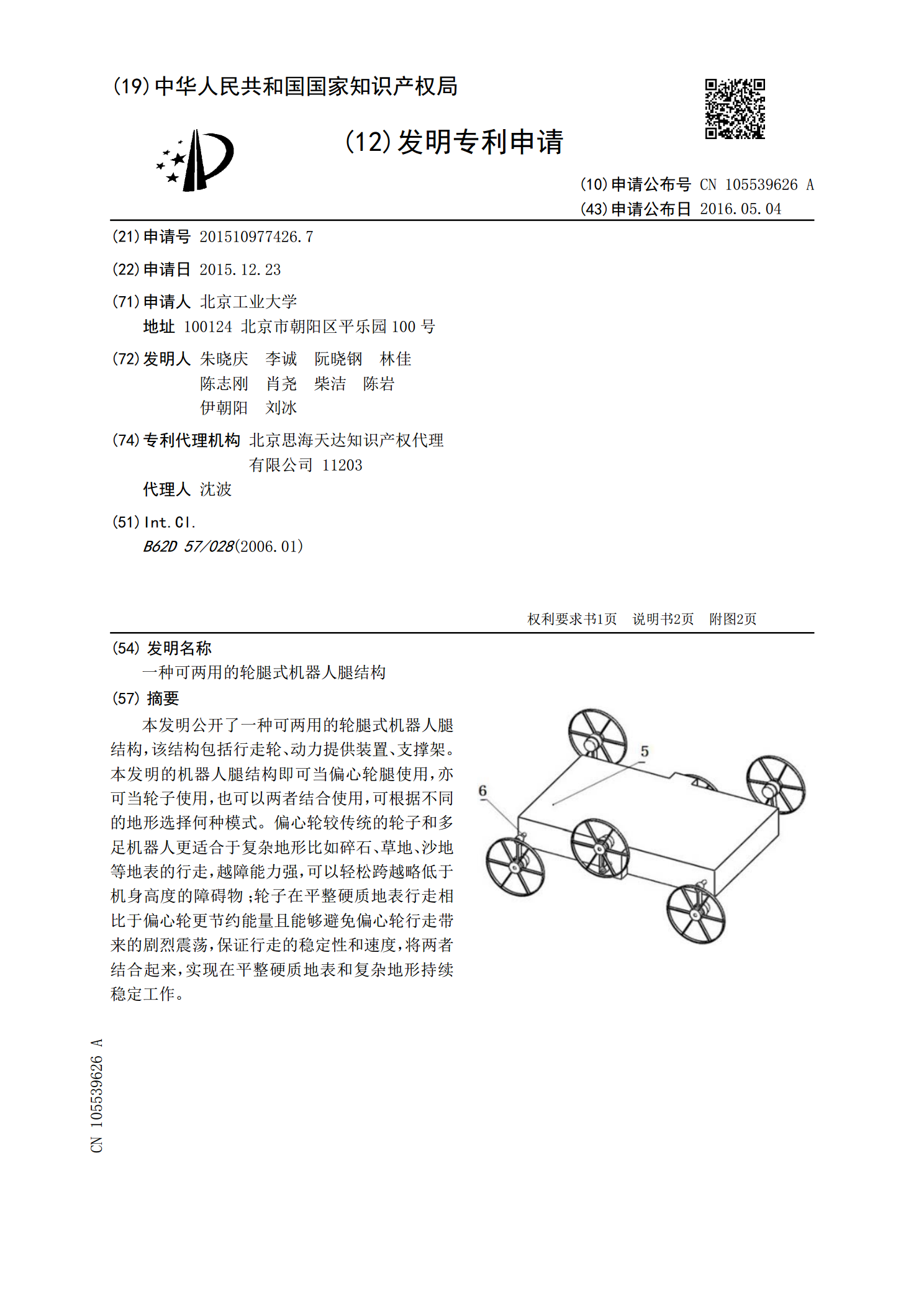
本发明公开了一种可两用的轮腿式机器人腿结构,该结构包括行走轮、动力提供装置、支撑架。本发明的机器人腿结构即可当偏心轮腿使用,亦可当轮子使用,也可以两者结合使用,可根据不同的地形选择何种模式。偏心轮较传统的轮子和多足机器人更适合于复杂地形比如碎石、草地、沙地等地表的行走,越障能力强,可以轻松跨越略低于机身高度的障碍物;轮子在平整硬质地表行走相比于偏心轮更节约能量且能够避免偏心轮行走带来的剧烈震荡,保证行走的稳定性和速度,将两者结合起来,实现在平整硬质地表和复杂地形持续稳定工作。