
一种可两用的轮腿式机器人腿结构.pdf

猫巷****婉慧

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可两用的轮腿式机器人腿结构.pdf
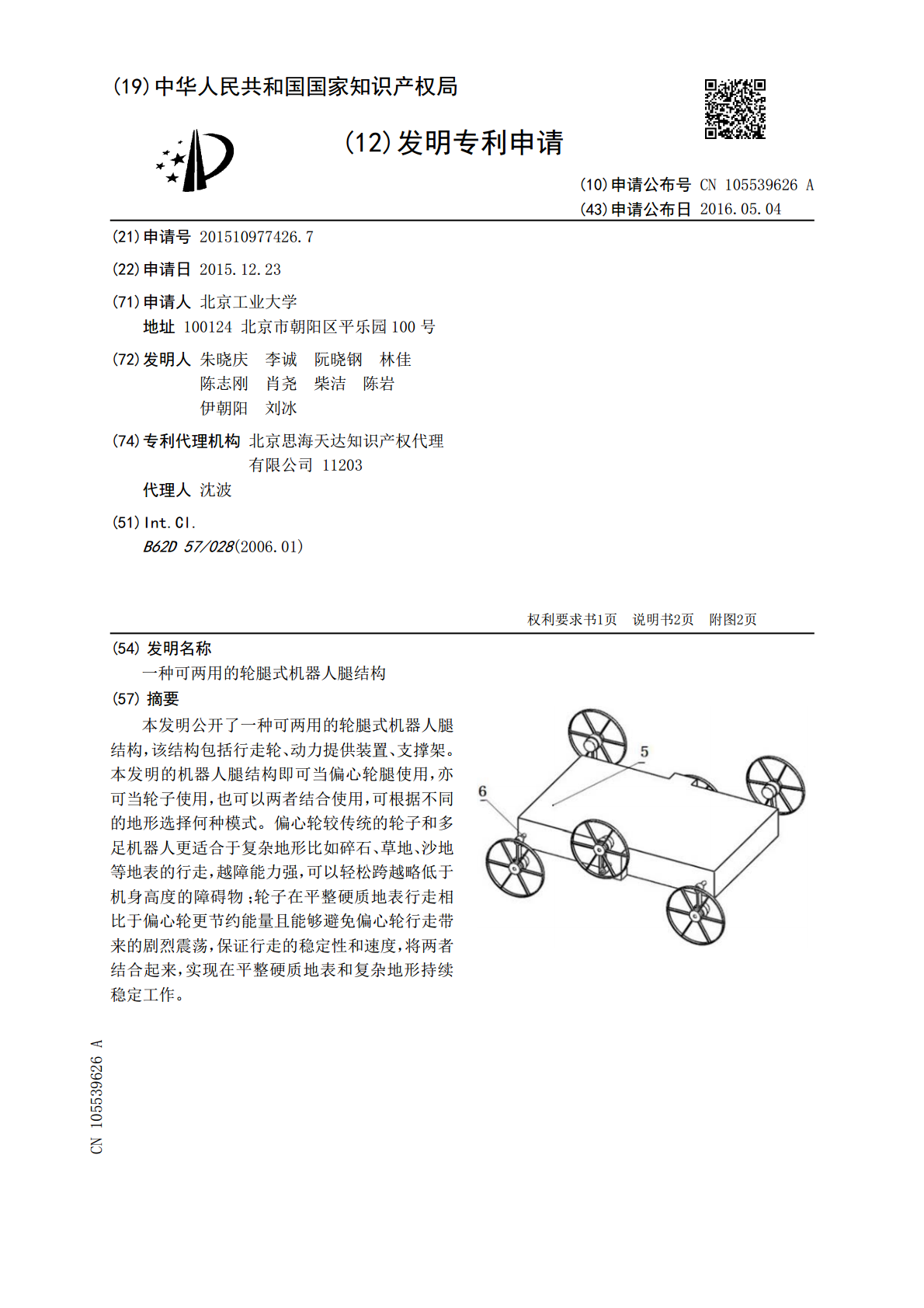
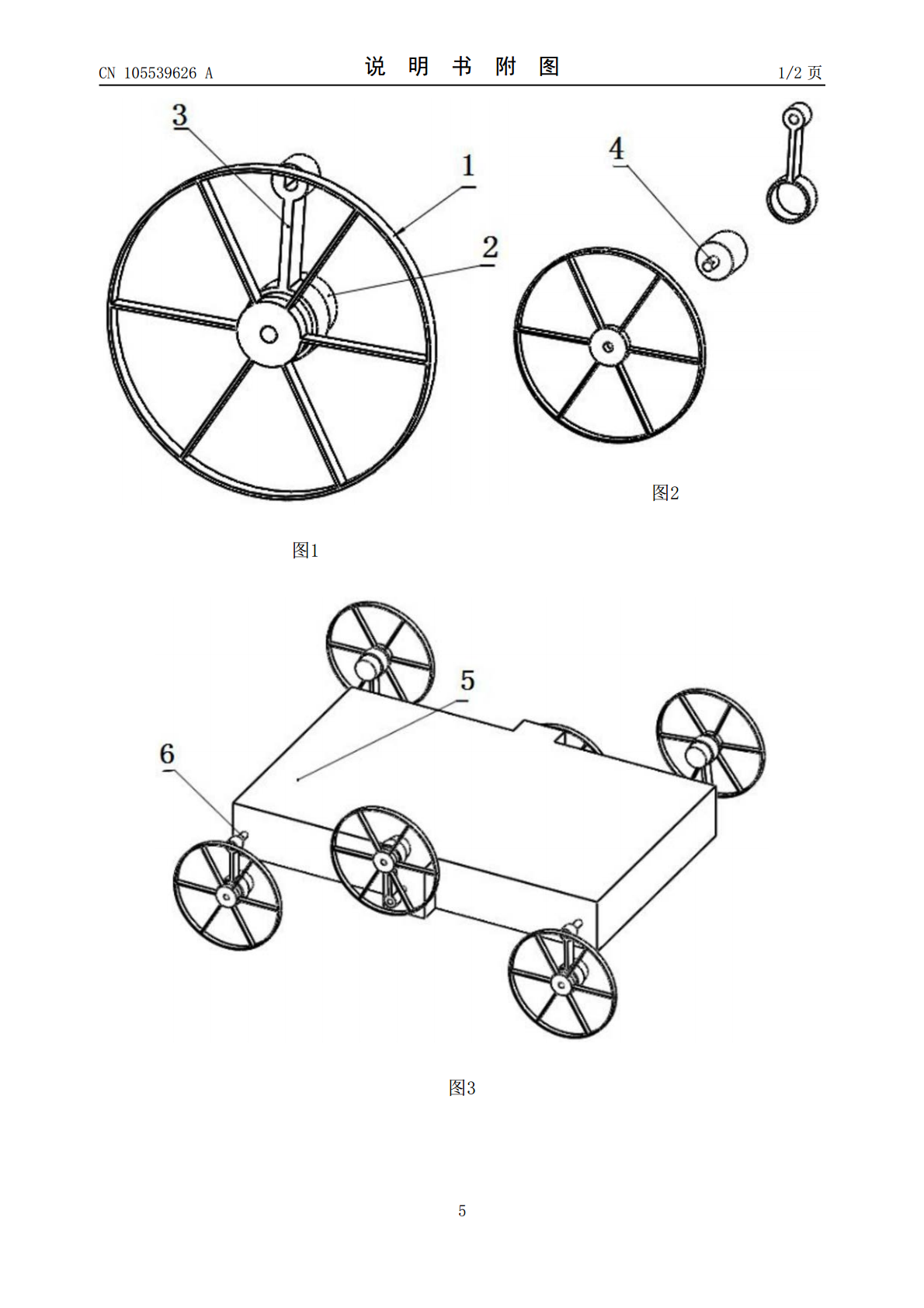
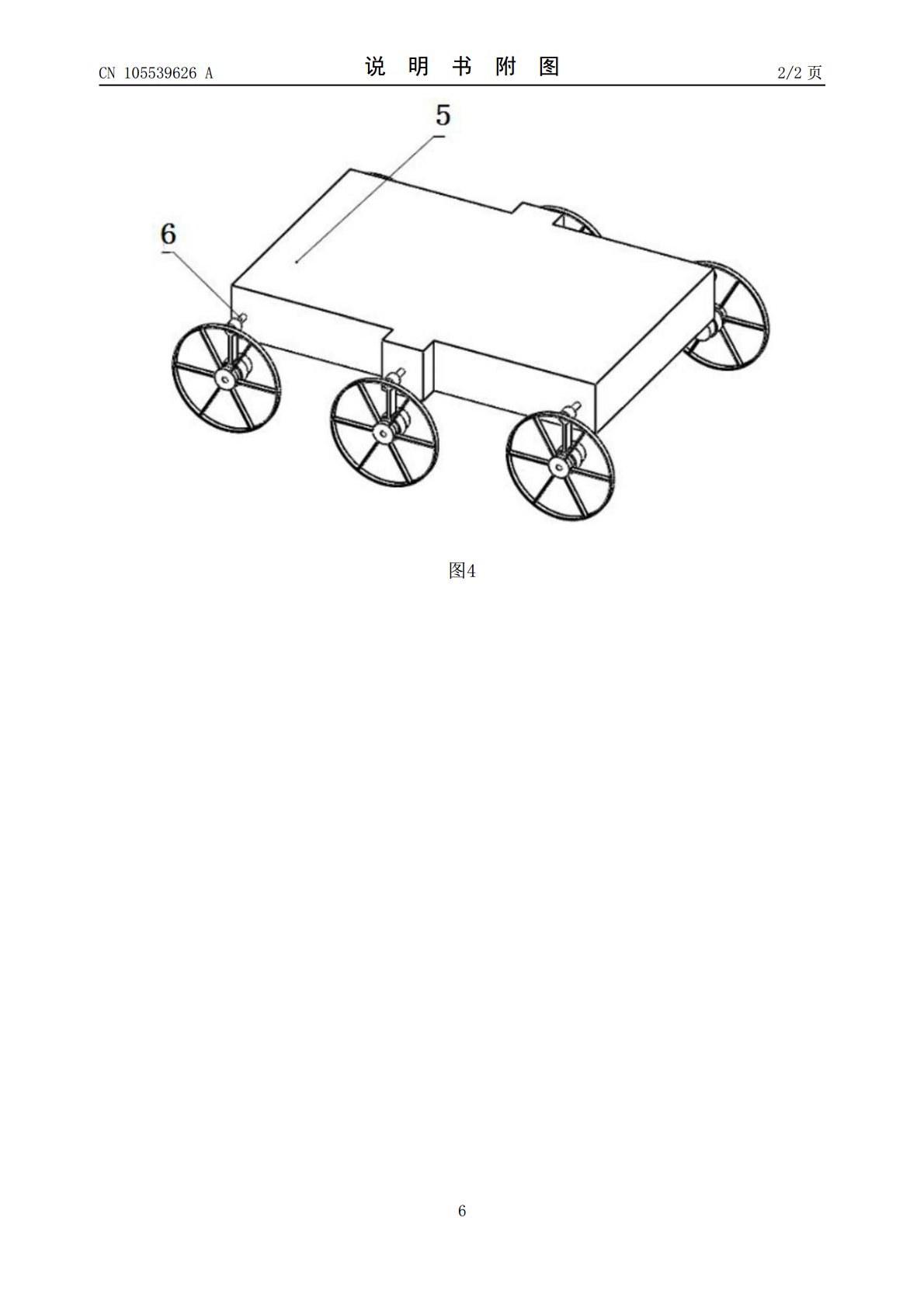
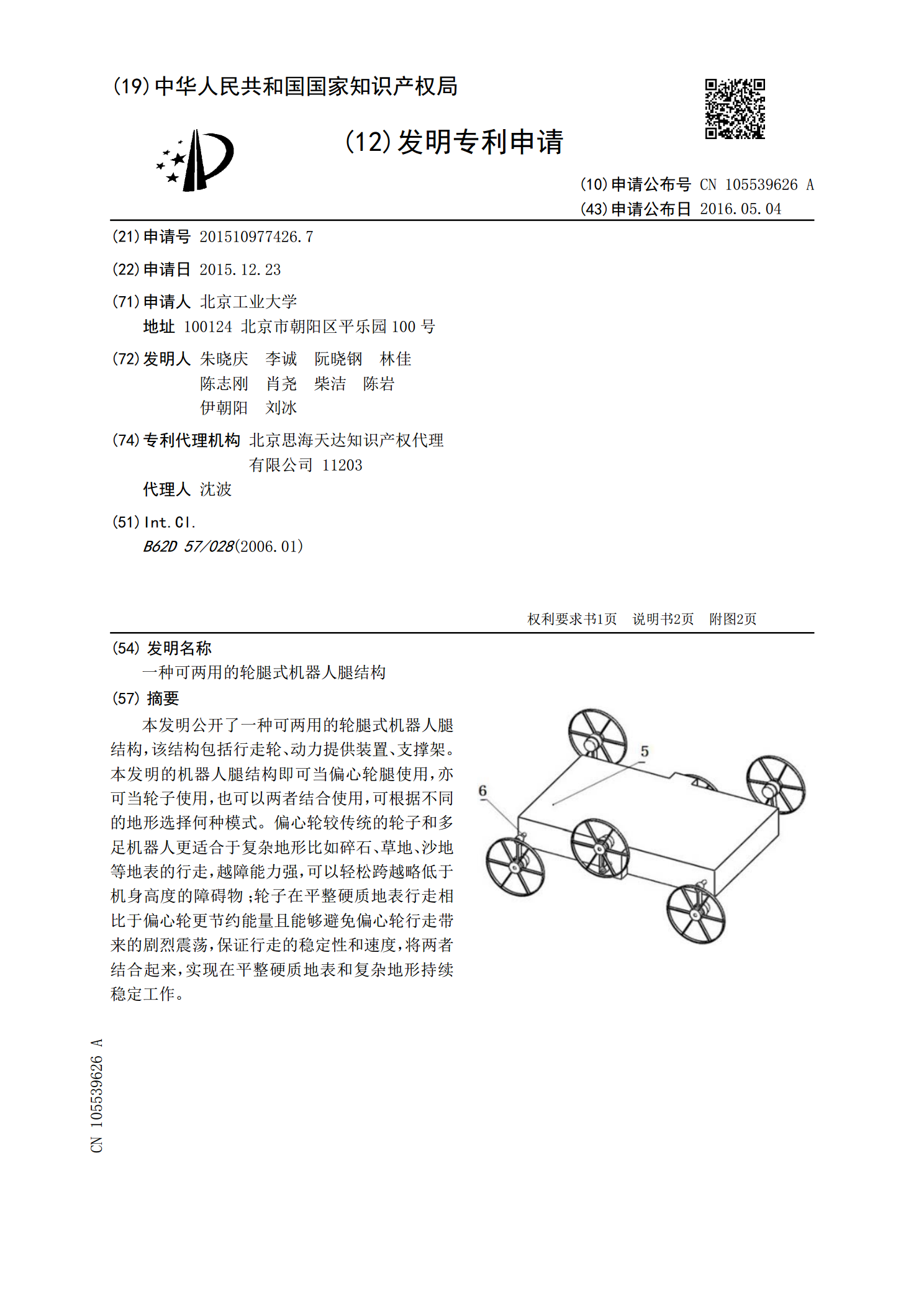
本发明公开了一种可两用的轮腿式机器人腿结构,该结构包括行走轮、动力提供装置、支撑架。本发明的机器人腿结构即可当偏心轮腿使用,亦可当轮子使用,也可以两者结合使用,可根据不同的地形选择何种模式。偏心轮较传统的轮子和多足机器人更适合于复杂地形比如碎石、草地、沙地等地表的行走,越障能力强,可以轻松跨越略低于机身高度的障碍物;轮子在平整硬质地表行走相比于偏心轮更节约能量且能够避免偏心轮行走带来的剧烈震荡,保证行走的稳定性和速度,将两者结合起来,实现在平整硬质地表和复杂地形持续稳定工作。
一种用于腿臂融合操作的轮腿式机器人的单腿结构.pdf
本发明公开一种用于腿臂融合操作的轮腿式机器人的单腿结构,运用仿生机构原理模仿蟑螂,对前三个关节:臀关节、髋关节、膝关节布置;后三个操作关节为第一~第三踝关节。其中前三关节的舵机与腿节部分直接连接驱动旋转;第一踝关节的驱动电机也采用直驱的方式;后两个关节,由于单腿总长的限制及避免运动干涉的需求,第二踝关节采用蜗轮蜗杆来进行驱动,第三踝关节则使用齿轮传递动力。上述膝关节与第一踝关节间设置有滚轮,可实现轮行与步行模式间的切换。本发明的优点为:末端位姿丰富,站立或步行时可采用的姿态众多,无论机器人进行单腿臂融合操

一种可翻转的轮腿式机器人.pdf
本发明公开了一种可翻转的轮腿式机器人,包括机器人车体,所述机器人车体的前侧设置有前盖,密封板的表面安装有前轮组件,侧盖的内壁安装有电机,电机的外侧连接有输出轴,输出轴的外部安装有轮腿组件,前轮组件包括有前轮直臂、前轮侧臂、第一螺栓、第二螺栓、U形轮臂连接件和万向轮,轮腿组件包括有联轴器、弧形单足、T字连接件、轮齿和螺丝。本发明将弧形足式结构的轮腿组件与固定式的前轮组件结合起来,既具有轮式机器人的灵活性,又具有腿式机器人的高越障性能,采用上下完全对称性的结构,使得机器人正反面可随时互换,避免了在非常复杂的地
新型变结构轮-腿式机器人.pdf
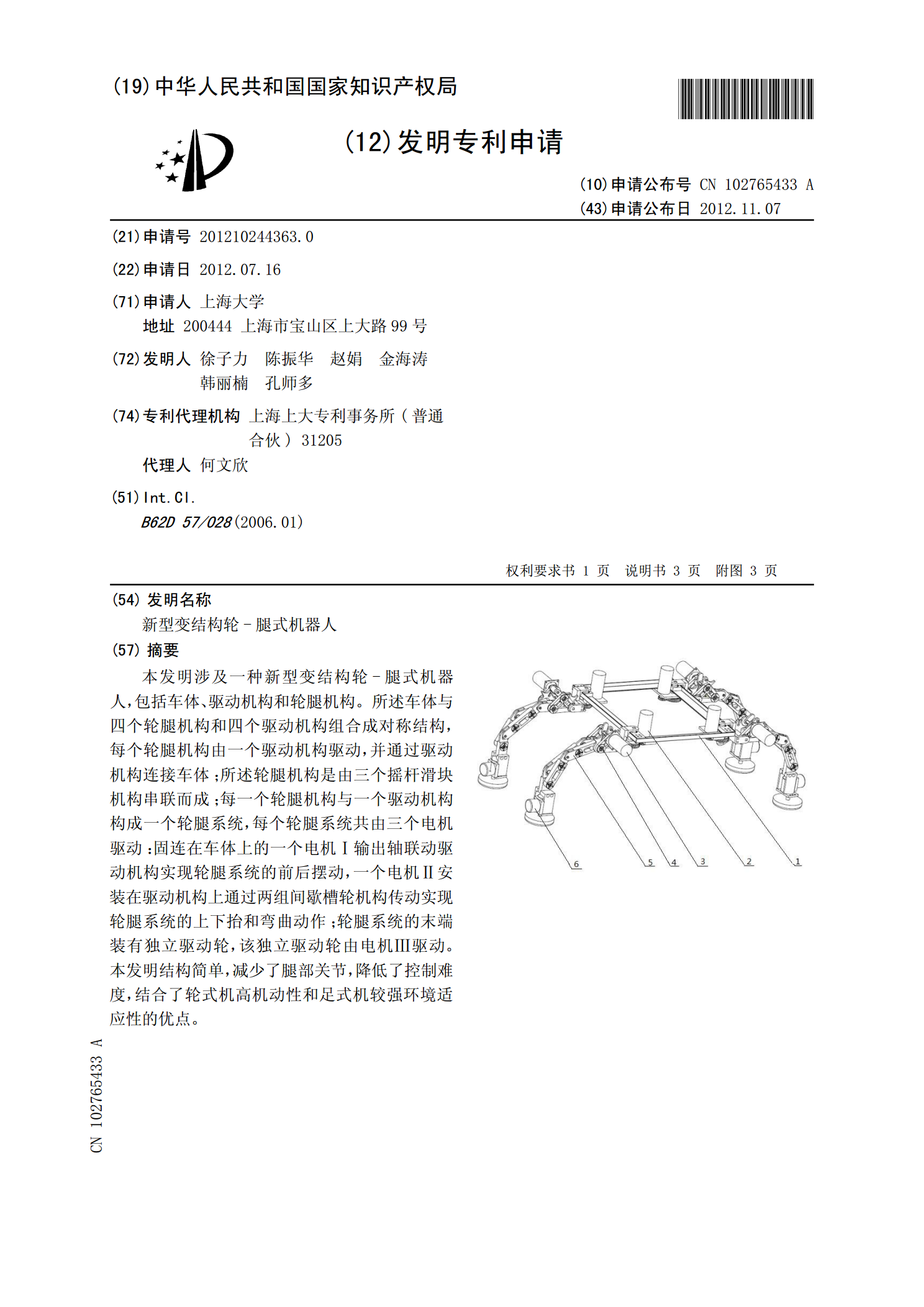
本发明涉及一种新型变结构轮-腿式机器人,包括车体、驱动机构和轮腿机构。所述车体与四个轮腿机构和四个驱动机构组合成对称结构,每个轮腿机构由一个驱动机构驱动,并通过驱动机构连接车体;所述轮腿机构是由三个摇杆滑块机构串联而成;每一个轮腿机构与一个驱动机构构成一个轮腿系统,每个轮腿系统共由三个电机驱动:固连在车体上的一个电机Ⅰ输出轴联动驱动机构实现轮腿系统的前后摆动,一个电机Ⅱ安装在驱动机构上通过两组间歇槽轮机构传动实现轮腿系统的上下抬和弯曲动作;轮腿系统的末端装有独立驱动轮,该独立驱动轮由电机Ⅲ驱动。本发明结构

一种轮腿两用机器人.pdf
本发明提供一种结构简单和成本低的一种轮腿两用机器人,包括动力装置、主体和轮腿,具有一个或一个以上双向驱动的动力装置,两个或两个以上轮腿,轮腿包含驱动轮腿或导向轮腿或驱动导向轮腿,轮腿与主体之间使用一个或两个自由度的活动关节联接;每个轮腿包含一个或一个以上活动关节,末端装有轮子,动力装置安装在主体内,驱动轮腿的轮子由动力装置产生的动力经主体和轮腿的传动装置驱动;活动关节使用分动装置或液压系统驱动,每个活动关节均可独立运动,动力装置安装在主体内,轮腿轻,驱动力大,负重能力和适应性强。