
轮腿机器人及轮腿的智能切换方法.pdf

光誉****君哥

1/8
2/8
3/8
4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮腿机器人及轮腿的智能切换方法.pdf
本发明涉及轮腿机器人及轮腿的智能切换方法,机器人检测并计算要行走路况前后、左右倾斜情况,并与对应的设定倾斜范围进行比较,以判断是否进行行走方式的切换,若是需要进行切换,则通过舵机控制器控制各舵机动作进行轮腿切换,若是无需切换,则继续先前的行走方式继续行进;本发明无需操作者手眼高度精准的配合,也无需实时跟踪进行操作,且若是机器人在行进过程中遇到路况的改变能够自动进行轮腿的切换,顺利到达既定目标,提高了机器人的智能化。

轮腿机器人.pdf
本发明公开了一种轮腿机器人,包括机架,机架上设置有四条结构相同的具有轮、足两用功能的腿,每条腿包括大腿和绕大腿径向转动的小腿,小腿的末端设置有轮子,所述小腿上连接有用于驱动小腿前后摆动的小腿驱动装置,所述轮子上固定有用于驱动轮子转动的直流电机,所述直流电机通过固定在沿小腿径向延伸的转轴连接有用于驱动直流电机绕转轴转动的轮驱动装置,且电机的传动轴始终与转轴处于垂直状态。该机器人依靠大腿舵机带动大腿上下摆动和小腿舵机带动小腿前后摆动,共同实现该机器人的腿式行走,即使在光滑的路面也不会产生打滑,而且该机器人操作
轮腿机器人.pdf
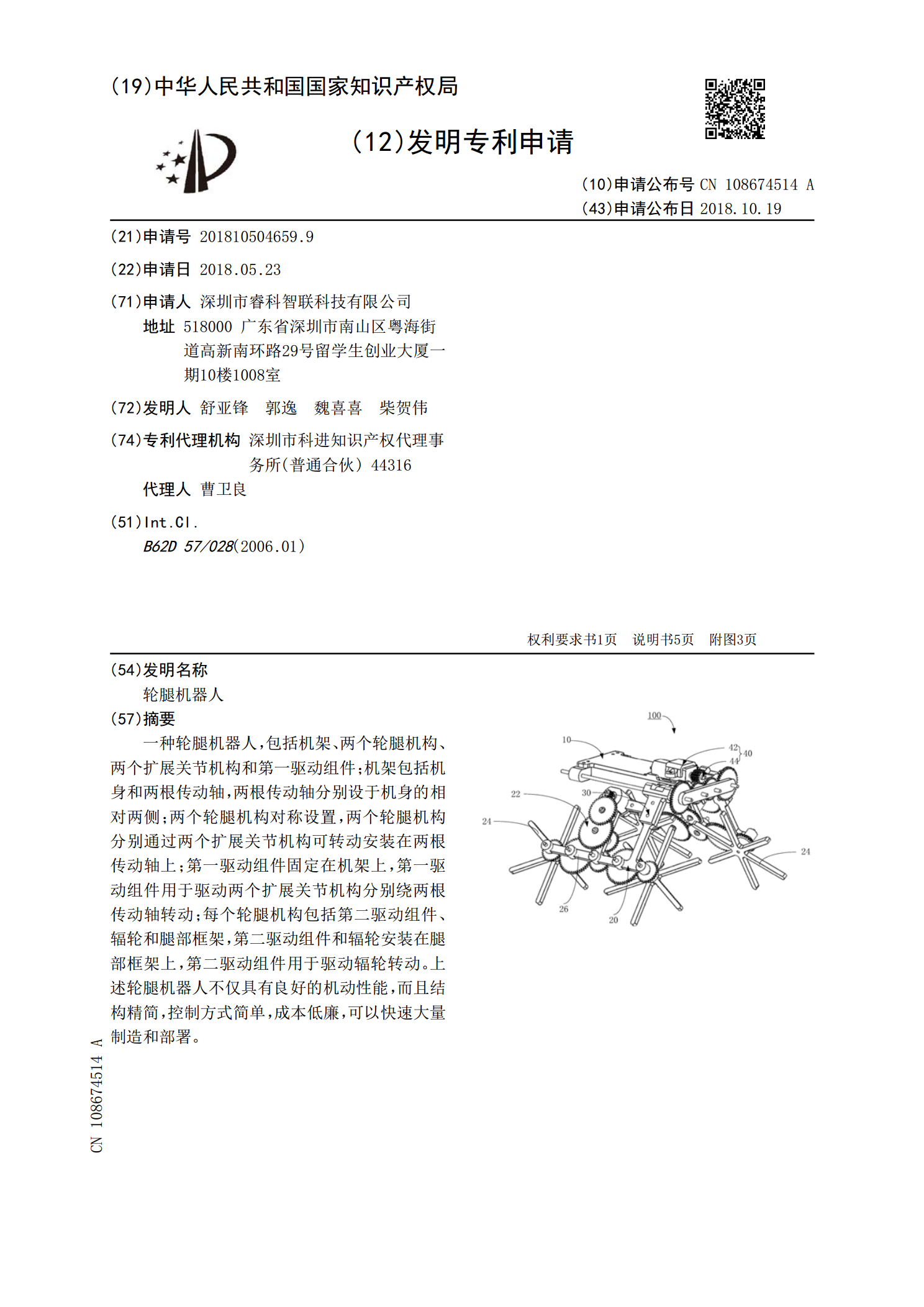
一种轮腿机器人,包括机架、两个轮腿机构、两个扩展关节机构和第一驱动组件;机架包括机身和两根传动轴,两根传动轴分别设于机身的相对两侧;两个轮腿机构对称设置,两个轮腿机构分别通过两个扩展关节机构可转动安装在两根传动轴上;第一驱动组件固定在机架上,第一驱动组件用于驱动两个扩展关节机构分别绕两根传动轴转动;每个轮腿机构包括第二驱动组件、辐轮和腿部框架,第二驱动组件和辐轮安装在腿部框架上,第二驱动组件用于驱动辐轮转动。上述轮腿机器人不仅具有良好的机动性能,而且结构精简,控制方式简单,成本低廉,可以快速大量制造和部署
一种轮腿模式可切换机器人.pdf
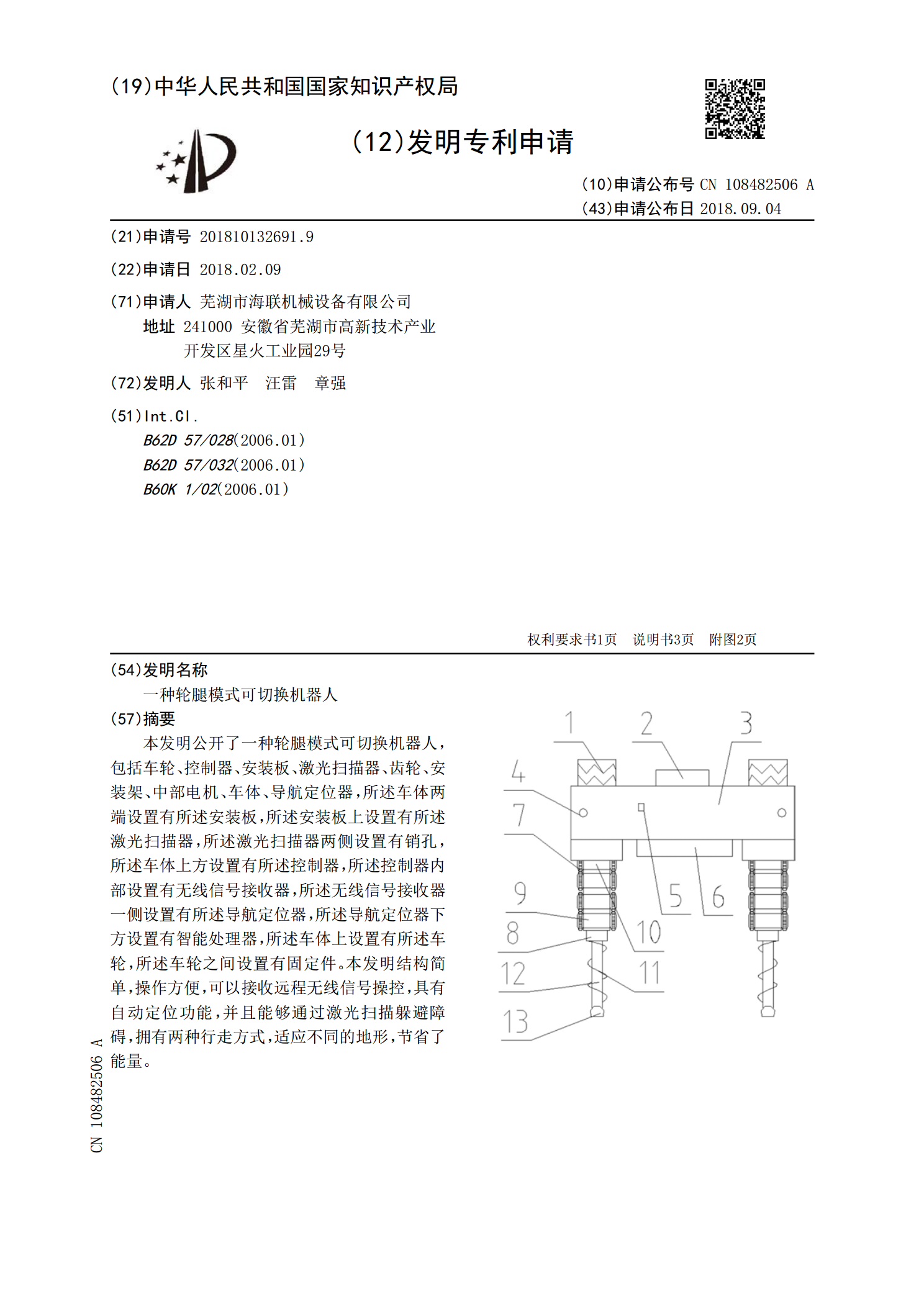
本发明公开了一种轮腿模式可切换机器人,包括车轮、控制器、安装板、激光扫描器、齿轮、安装架、中部电机、车体、导航定位器,所述车体两端设置有所述安装板,所述安装板上设置有所述激光扫描器,所述激光扫描器两侧设置有销孔,所述车体上方设置有所述控制器,所述控制器内部设置有无线信号接收器,所述无线信号接收器一侧设置有所述导航定位器,所述导航定位器下方设置有智能处理器,所述车体上设置有所述车轮,所述车轮之间设置有固定件。本发明结构简单,操作方便,可以接收远程无线信号操控,具有自动定位功能,并且能够通过激光扫描躲避障碍,

一种轮腿模式可切换机器人.pdf
本发明涉及一种轮腿模式可切换机器人,其技术特点是:在车体两侧长边对称安装有四条结构完全相同的腿和四个车轮,在车体内安装有车轮电机驱动装置用于驱动四个车轮,每条腿均包括弧形连接架、大腿、小腿和脚,小腿底部安装在脚上,小腿顶部安装在大腿两部分之间,在大腿上安装有大腿驱动装置和小腿驱动装置,弧形连接架安装在车体和大腿之间,该弧形连接架由安装在车体侧边的弧形连接架电机驱动并可绕车轮旋转。本发明将轮式机器人与足式机器人结合在一起,可以根据实际情况有效地选择不同的行走方式,以达到提高移动速度,降低机器人能量损耗,提高