
一种可翻转的轮腿式机器人.pdf

醉香****mm


1/9
2/9
3/9
4/9

5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可翻转的轮腿式机器人.pdf
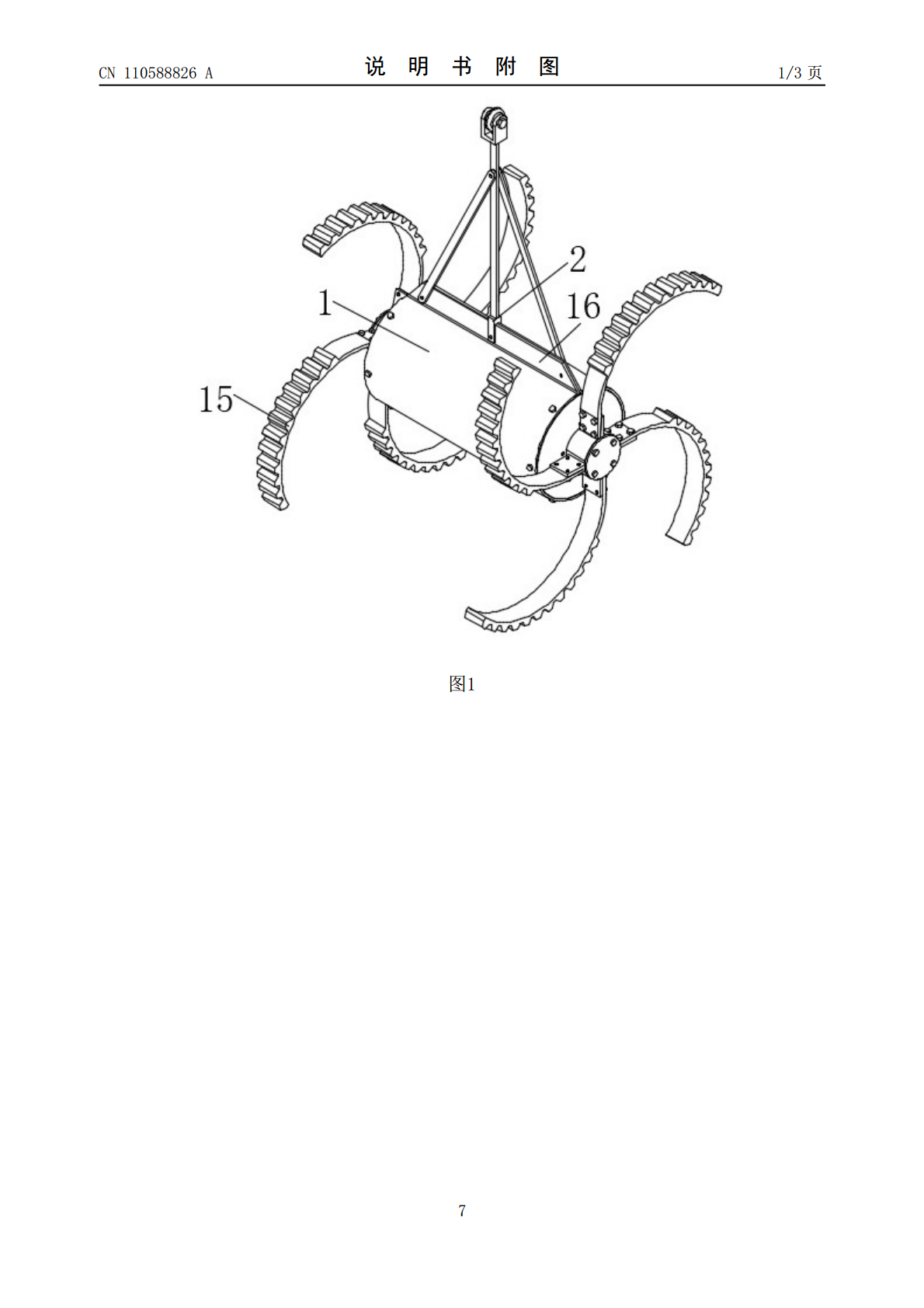
本发明公开了一种可翻转的轮腿式机器人,包括机器人车体,所述机器人车体的前侧设置有前盖,密封板的表面安装有前轮组件,侧盖的内壁安装有电机,电机的外侧连接有输出轴,输出轴的外部安装有轮腿组件,前轮组件包括有前轮直臂、前轮侧臂、第一螺栓、第二螺栓、U形轮臂连接件和万向轮,轮腿组件包括有联轴器、弧形单足、T字连接件、轮齿和螺丝。本发明将弧形足式结构的轮腿组件与固定式的前轮组件结合起来,既具有轮式机器人的灵活性,又具有腿式机器人的高越障性能,采用上下完全对称性的结构,使得机器人正反面可随时互换,避免了在非常复杂的地
一种可两用的轮腿式机器人腿结构.pdf
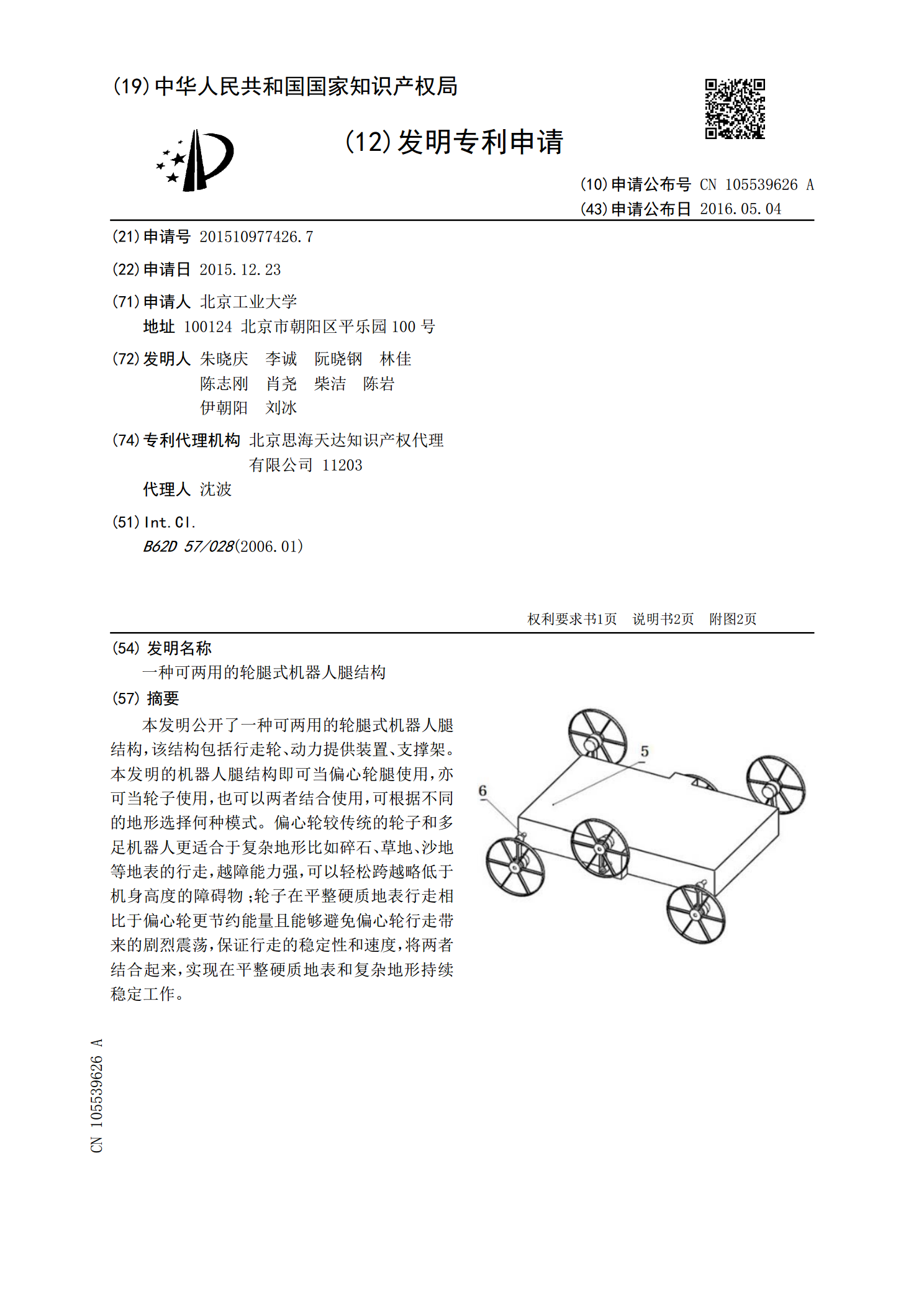
本发明公开了一种可两用的轮腿式机器人腿结构,该结构包括行走轮、动力提供装置、支撑架。本发明的机器人腿结构即可当偏心轮腿使用,亦可当轮子使用,也可以两者结合使用,可根据不同的地形选择何种模式。偏心轮较传统的轮子和多足机器人更适合于复杂地形比如碎石、草地、沙地等地表的行走,越障能力强,可以轻松跨越略低于机身高度的障碍物;轮子在平整硬质地表行走相比于偏心轮更节约能量且能够避免偏心轮行走带来的剧烈震荡,保证行走的稳定性和速度,将两者结合起来,实现在平整硬质地表和复杂地形持续稳定工作。
一种轮腿式机器人.pdf
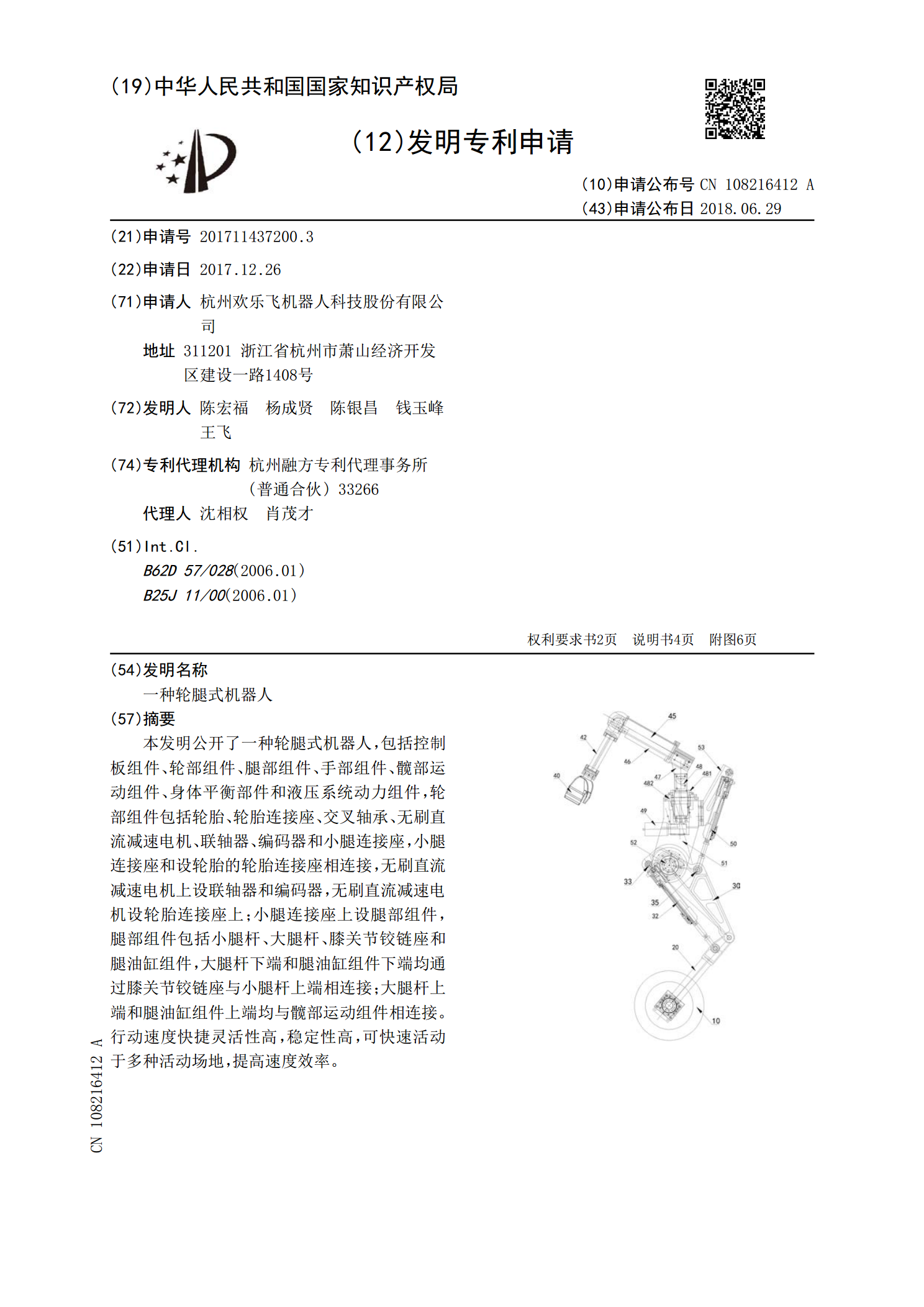
本发明公开了一种轮腿式机器人,包括控制板组件、轮部组件、腿部组件、手部组件、髋部运动组件、身体平衡部件和液压系统动力组件,轮部组件包括轮胎、轮胎连接座、交叉轴承、无刷直流减速电机、联轴器、编码器和小腿连接座,小腿连接座和设轮胎的轮胎连接座相连接,无刷直流减速电机上设联轴器和编码器,无刷直流减速电机设轮胎连接座上;小腿连接座上设腿部组件,腿部组件包括小腿杆、大腿杆、膝关节铰链座和腿油缸组件,大腿杆下端和腿油缸组件下端均通过膝关节铰链座与小腿杆上端相连接;大腿杆上端和腿油缸组件上端均与髋部运动组件相连接。行动
一种轮腿式爬楼机器人.pdf
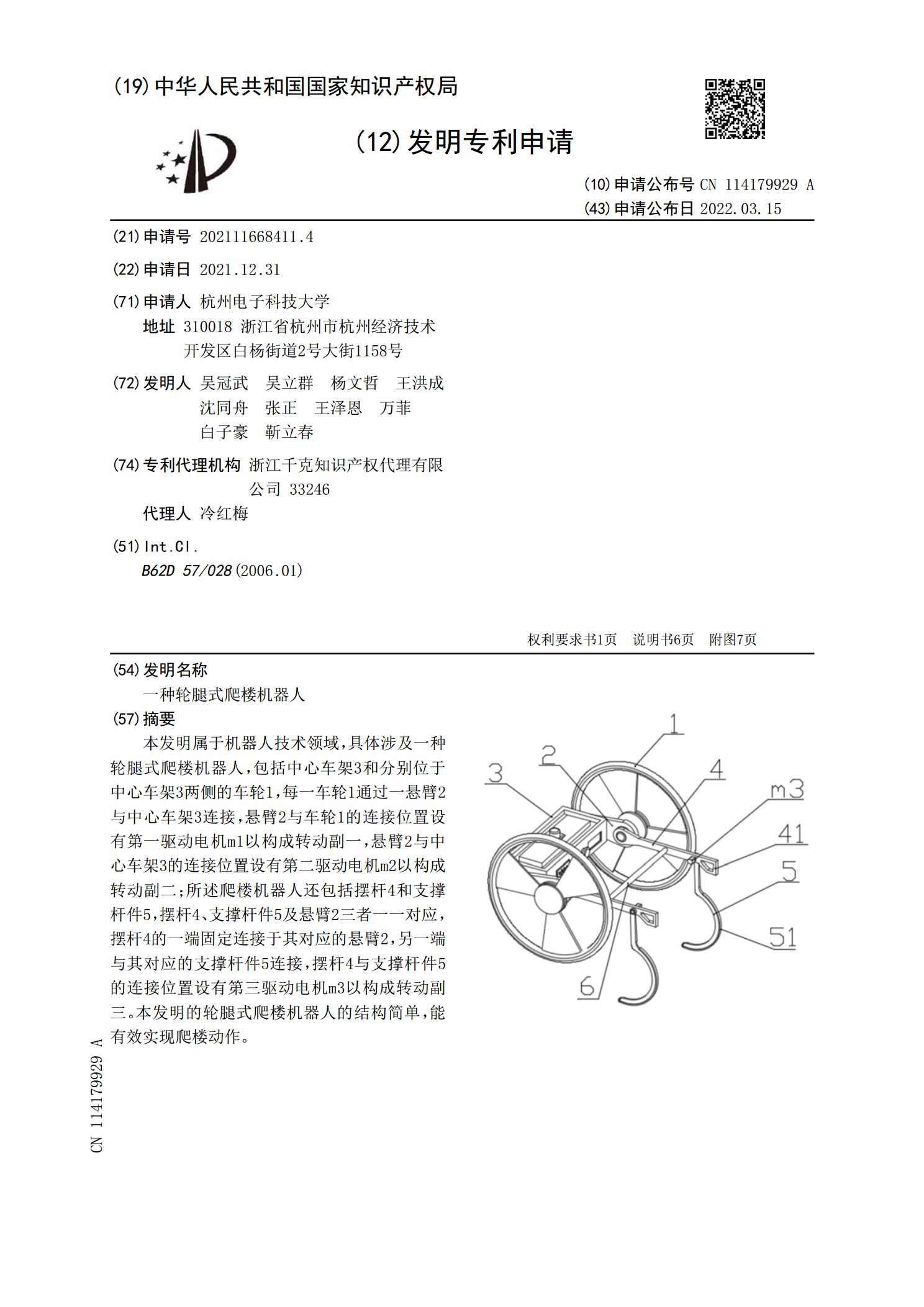
本发明属于机器人技术领域,具体涉及一种轮腿式爬楼机器人,包括中心车架3和分别位于中心车架3两侧的车轮1,每一车轮1通过一悬臂2与中心车架3连接,悬臂2与车轮1的连接位置设有第一驱动电机m1以构成转动副一,悬臂2与中心车架3的连接位置设有第二驱动电机m2以构成转动副二;所述爬楼机器人还包括摆杆4和支撑杆件5,摆杆4、支撑杆件5及悬臂2三者一一对应,摆杆4的一端固定连接于其对应的悬臂2,另一端与其对应的支撑杆件5连接,摆杆4与支撑杆件5的连接位置设有第三驱动电机m3以构成转动副三。本发明的轮腿式爬楼机器人的结
一种轮腿式快递机器人.pdf
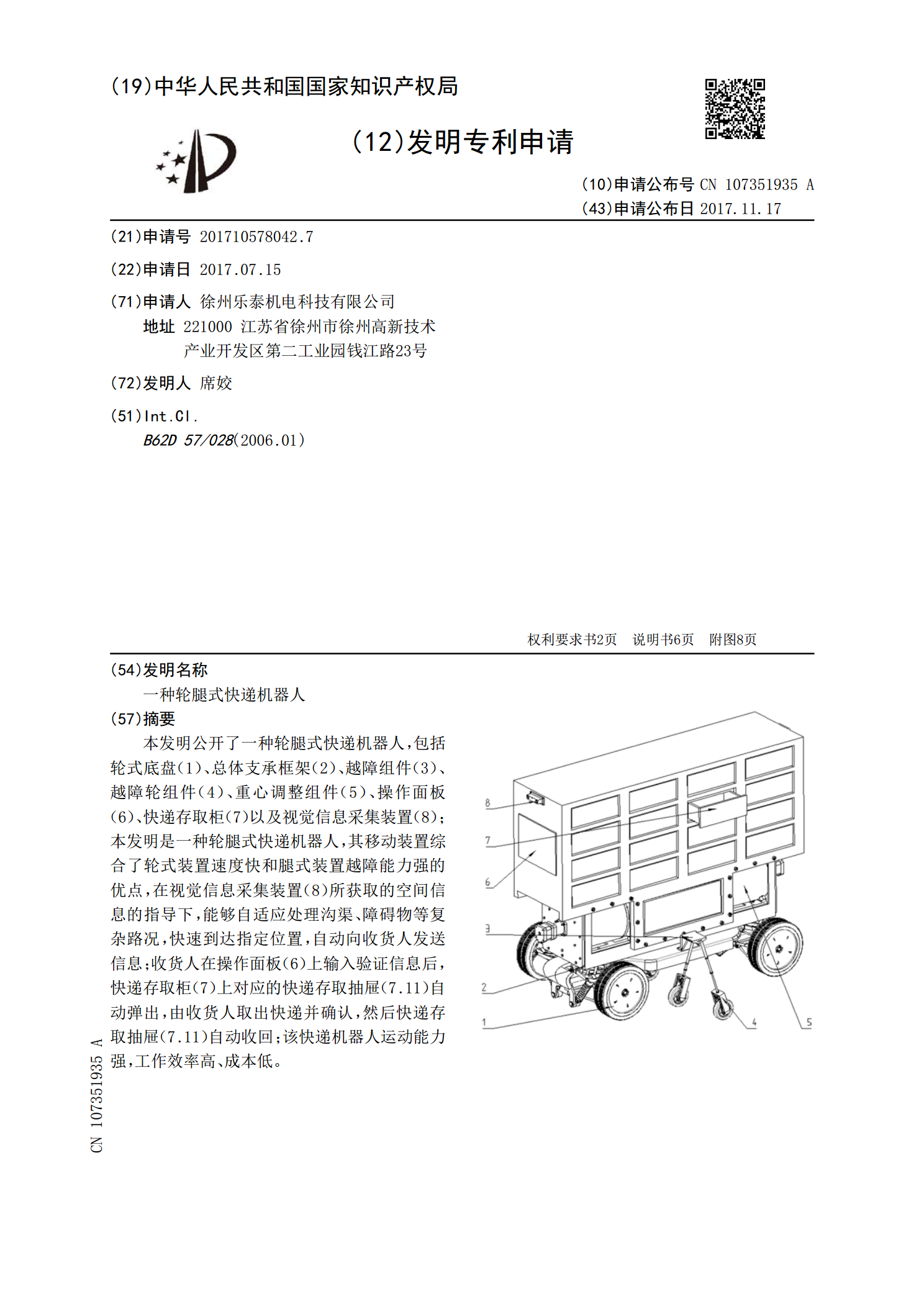
本发明公开了一种轮腿式快递机器人,包括轮式底盘(1)、总体支承框架(2)、越障组件(3)、越障轮组件(4)、重心调整组件(5)、操作面板(6)、快递存取柜(7)以及视觉信息采集装置(8);本发明是一种轮腿式快递机器人,其移动装置综合了轮式装置速度快和腿式装置越障能力强的优点,在视觉信息采集装置(8)所获取的空间信息的指导下,能够自适应处理沟渠、障碍物等复杂路况,快速到达指定位置,自动向收货人发送信息;收货人在操作面板(6)上输入验证信息后,快递存取柜(7)上对应的快递存取抽屉(7.11)自动弹出,由收货人