
一种三轴混合驱动式机械臂.pdf

努力****承悦


1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种三轴混合驱动式机械臂.pdf
三轴混合驱动式机械臂,包括底座、支座、后臂、前臂、手掌,所述的手掌通过两个平行四边形机构构成的第一连杆机构连接支座,装在前臂连杆上的第一红外测距仪对准装在后臂连杆上的第二红外测距仪;所述的前臂和后臂内装有驱动前臂与后臂相对开合的电磁线圈驱动机构,所述的电磁线圈驱动机构包括第二连杆机构和电磁线圈;所述的支座内装有用于驱动支座绕底座旋转和后臂绕支座转动的蜗轮蜗杆式直流伺服电机;所述的支座和后臂上都装有位置传感器;所述的位置传感器、第一红外测距仪、第二红外测距仪的输出端都连接控制器的输入端,所述的蜗轮蜗杆式直流

一种三轴式混合动力驱动装置.pdf
本发明公开了一种三轴式混合动力驱动装置,属于混合动力汽车传动领域,本发明根据电动车用双电机四档变速器,在其基础上加入了发动机传动机构将动力引入原有的双电机四档变速器,使其形成4个纯电动档和8个混合驱动档,有效的解决了混合动力汽车动力性不足的问题,并且在换挡过程中和纯电动模式与混合驱动模式转换的过程中输出扭矩连续,无动力中断,不会发生动力中断的问题,舒适性更好,通过在原有的双电机四档变速器中增加一对纯电动齿轮对可以增加2个混合驱动档,能够更好的保证低速行驶的大扭矩与高速行驶的动力性。

一种电机驱动多轴组合机械臂系统.pdf
本发明涉及一种电机驱动多轴组合机械臂系统,包括设置于垂直方向单轴机械臂顶端的水平方向单轴机械臂,二者之间通过转轴组件活动连接并且使水平方向单轴机械臂旋转,水平方向单轴机械臂包括滚珠轴承外部的齿轮、机械臂底座上的电机驱动机构,电机驱动机构包括一蜗杆齿轮,蜗杆齿轮的齿与齿轮外圈的轮齿相啮合,使蜗杆齿轮旋转并且带动齿轮,齿轮带动水平方向单轴机械臂的转动组件进行转动。本发明可形成具有多轴工作的若干组机械臂,通过在一个单轴机械臂上安装另一个单轴机械臂,直接根据加工机床加工工艺的需要来装配单轴机械臂或多个单轴机械臂,

一种三轴机械臂.pdf
本实用新型涉及一种三轴机械臂,它包括滑动连接在支架上的升降机构,与升降机构连接的摆臂、工作臂;第二驱动电机与摆臂驱动齿轮连接带动外齿圈上的摆臂旋转;第三驱动电机驱动工作臂的传动轴带动作业部旋转。所述传动轴两端分别与所述摆臂的前端、所述作业部转动连接。本实用新型的三轴机械臂体积小、重量轻、灵活性好,缩小了相应配套设备的体积,完全替代了人工,提高了配套设备的效率和安全性。
一种分布式三轴驱动混合动力系统.pdf
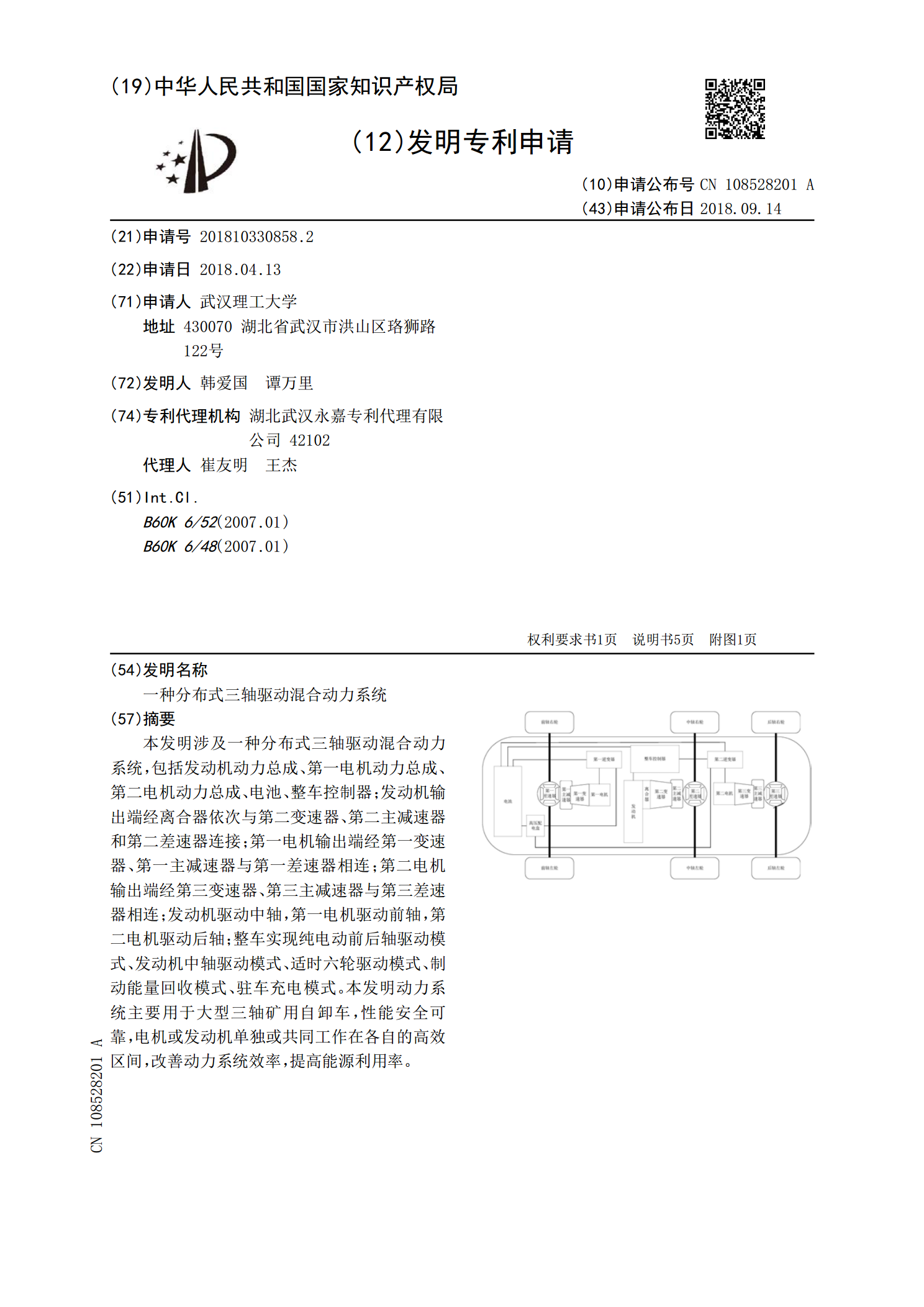
本发明涉及一种分布式三轴驱动混合动力系统,包括发动机动力总成、第一电机动力总成、第二电机动力总成、电池、整车控制器;发动机输出端经离合器依次与第二变速器、第二主减速器和第二差速器连接;第一电机输出端经第一变速器、第一主减速器与第一差速器相连;第二电机输出端经第三变速器、第三主减速器与第三差速器相连;发动机驱动中轴,第一电机驱动前轴,第二电机驱动后轴;整车实现纯电动前后轴驱动模式、发动机中轴驱动模式、适时六轮驱动模式、制动能量回收模式、驻车充电模式。本发明动力系统主要用于大型三轴矿用自卸车,性能安全可靠,电