
一种无人机飞行抓取系统.pdf

安双****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人机飞行抓取系统.pdf
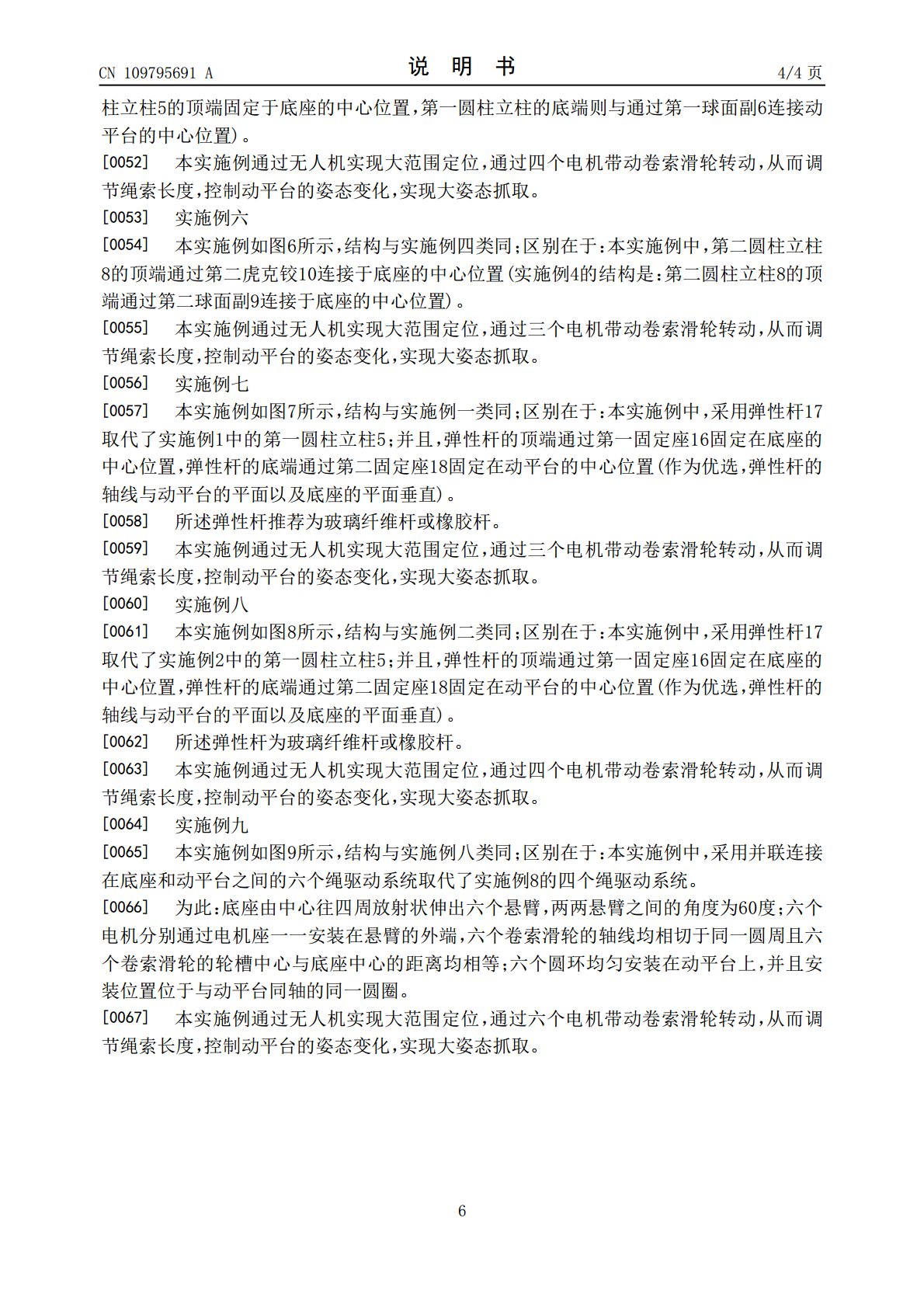
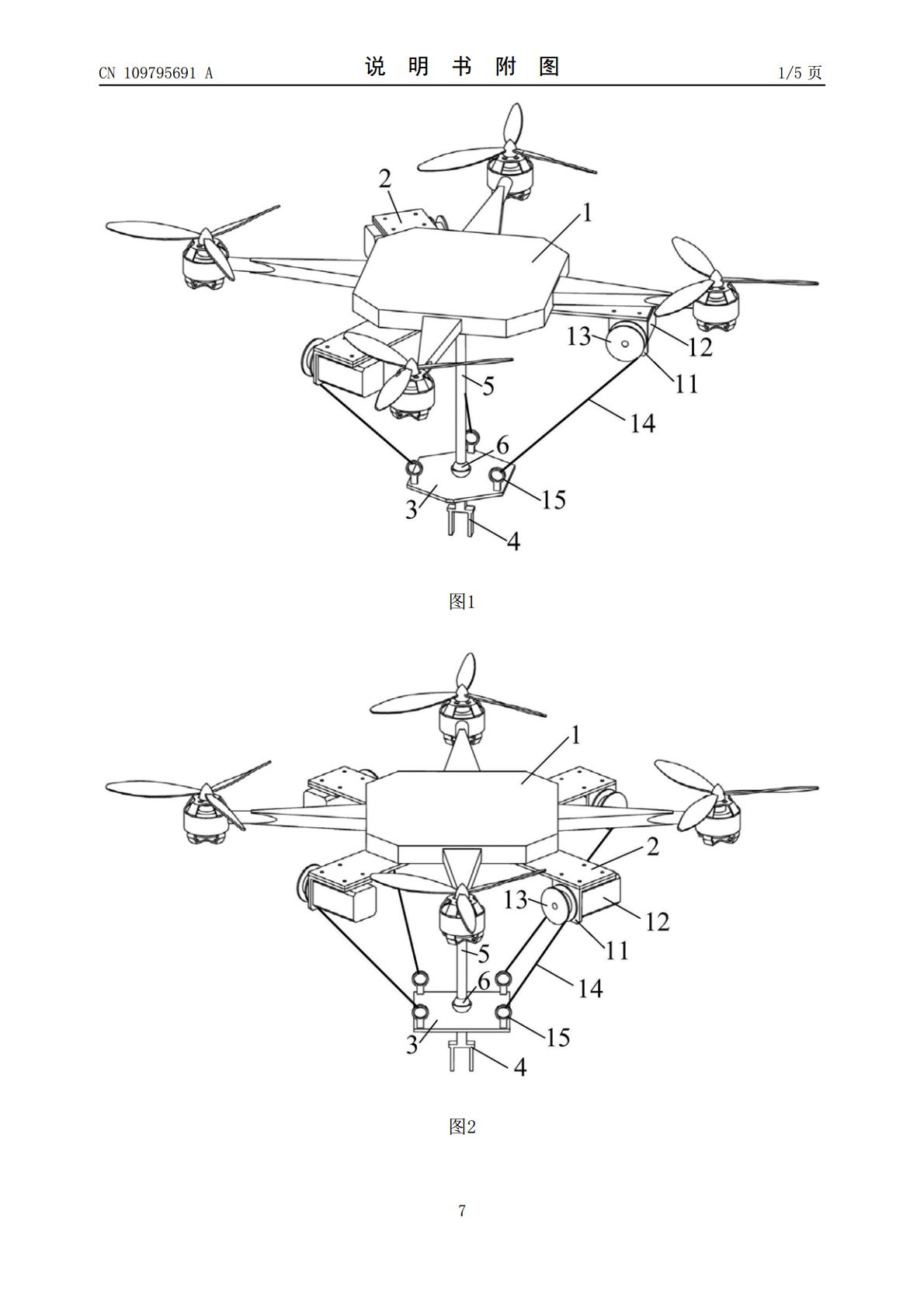
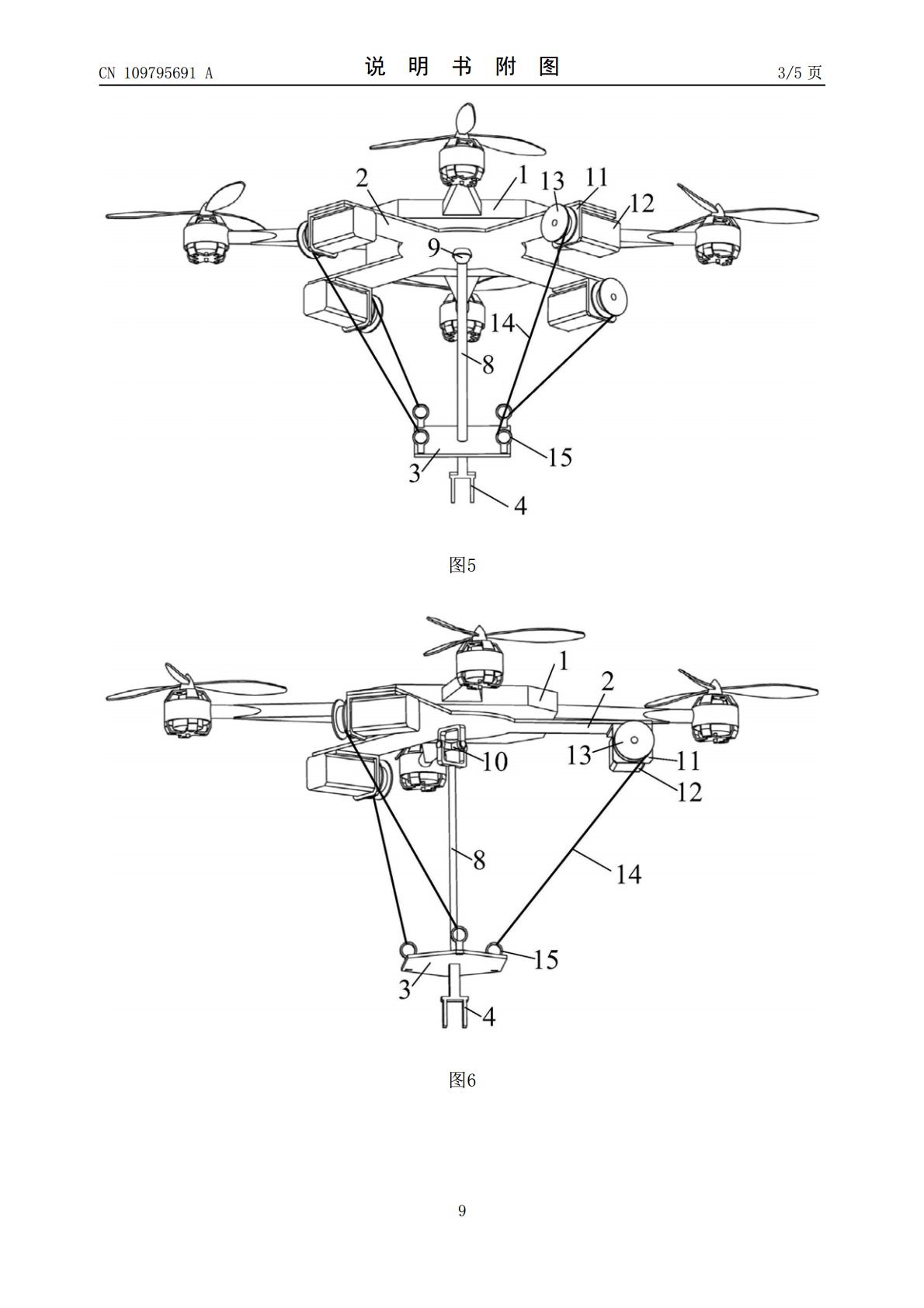
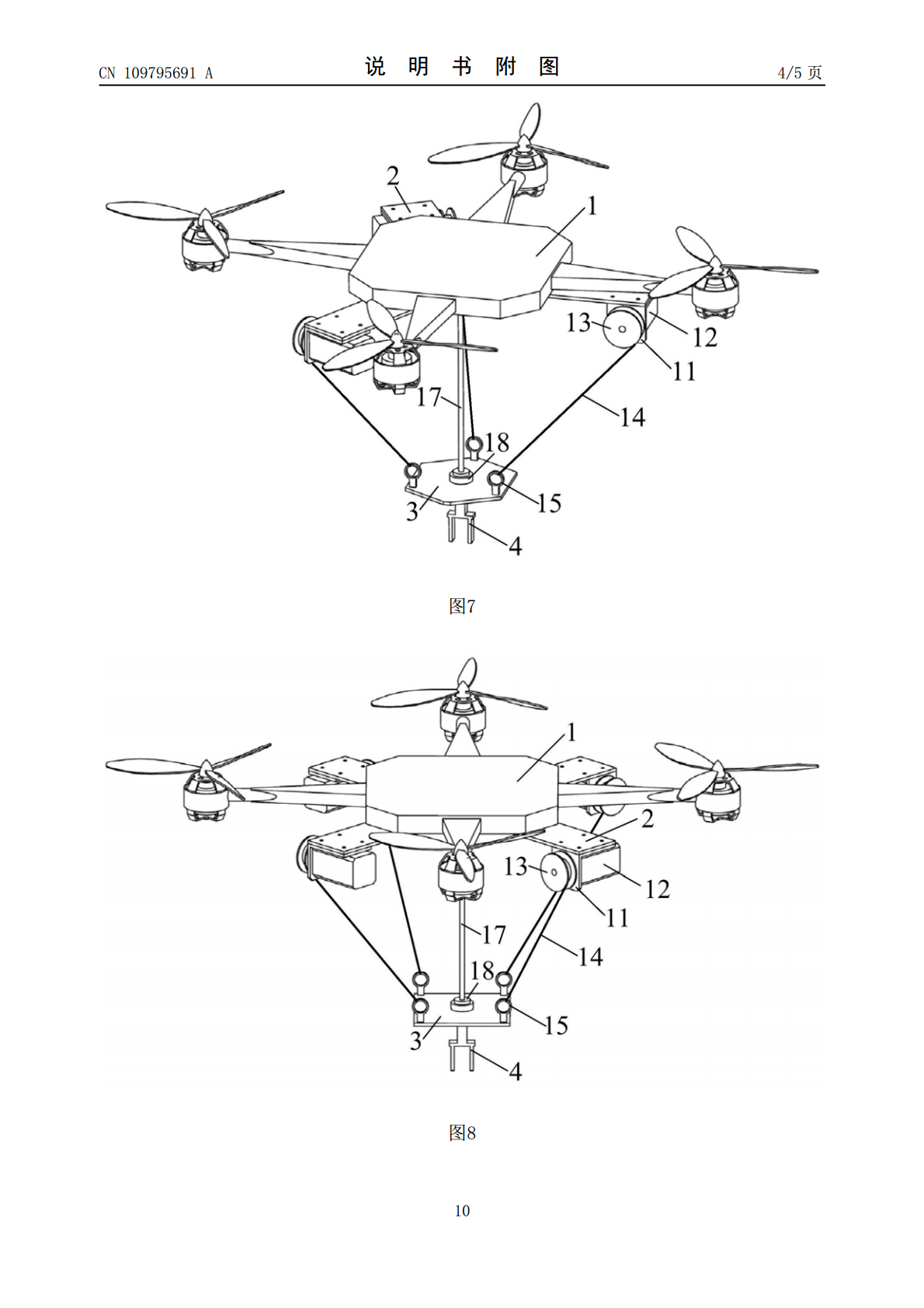
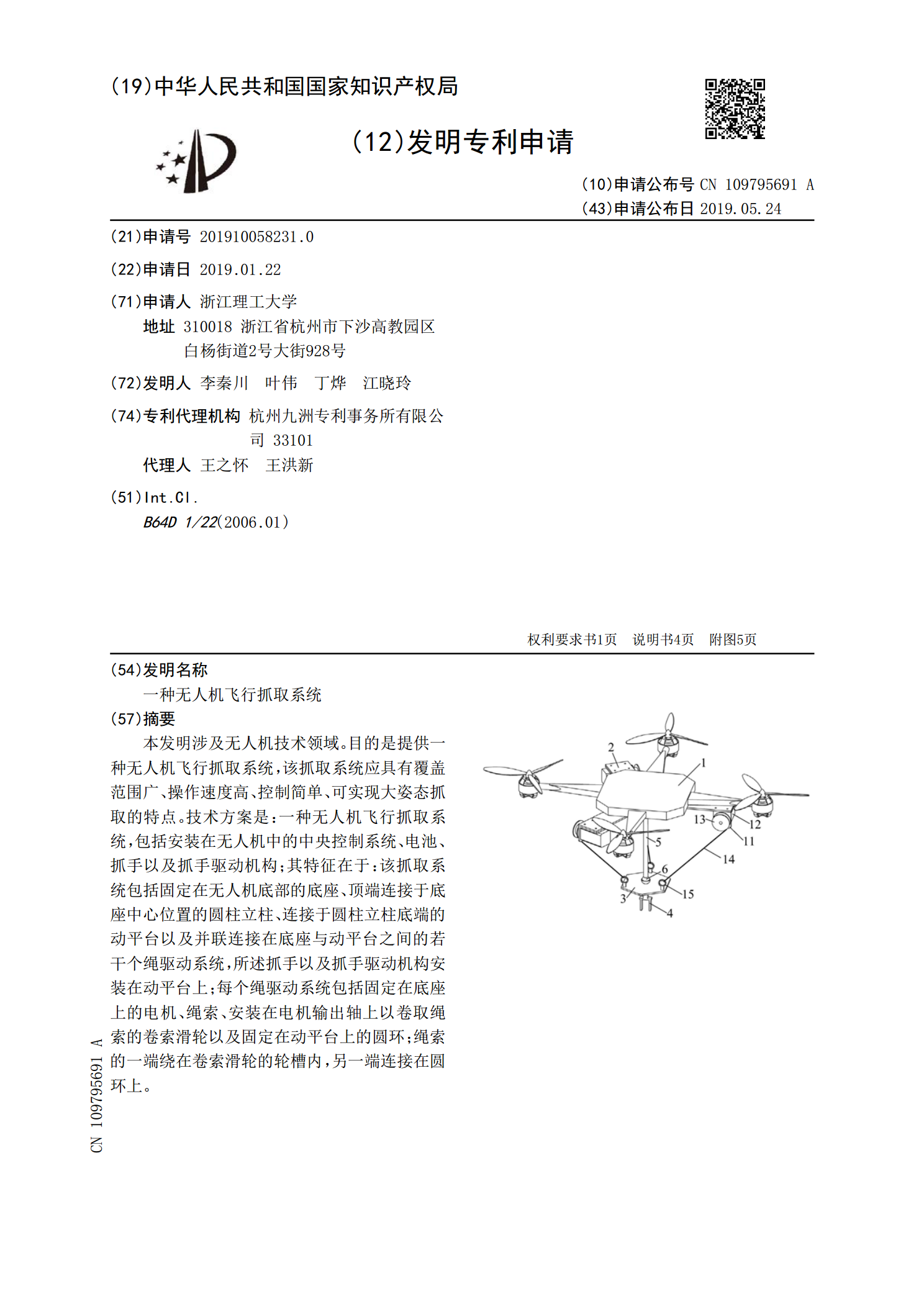
本发明涉及无人机技术领域。目的是提供一种无人机飞行抓取系统,该抓取系统应具有覆盖范围广、操作速度高、控制简单、可实现大姿态抓取的特点。技术方案是:一种无人机飞行抓取系统,包括安装在无人机中的中央控制系统、电池、抓手以及抓手驱动机构;其特征在于:该抓取系统包括固定在无人机底部的底座、顶端连接于底座中心位置的圆柱立柱、连接于圆柱立柱底端的动平台以及并联连接在底座与动平台之间的若干个绳驱动系统,所述抓手以及抓手驱动机构安装在动平台上;每个绳驱动系统包括固定在底座上的电机、绳索、安装在电机输出轴上以卷取绳索的卷索
一种无人机用货物抓取系统.pdf
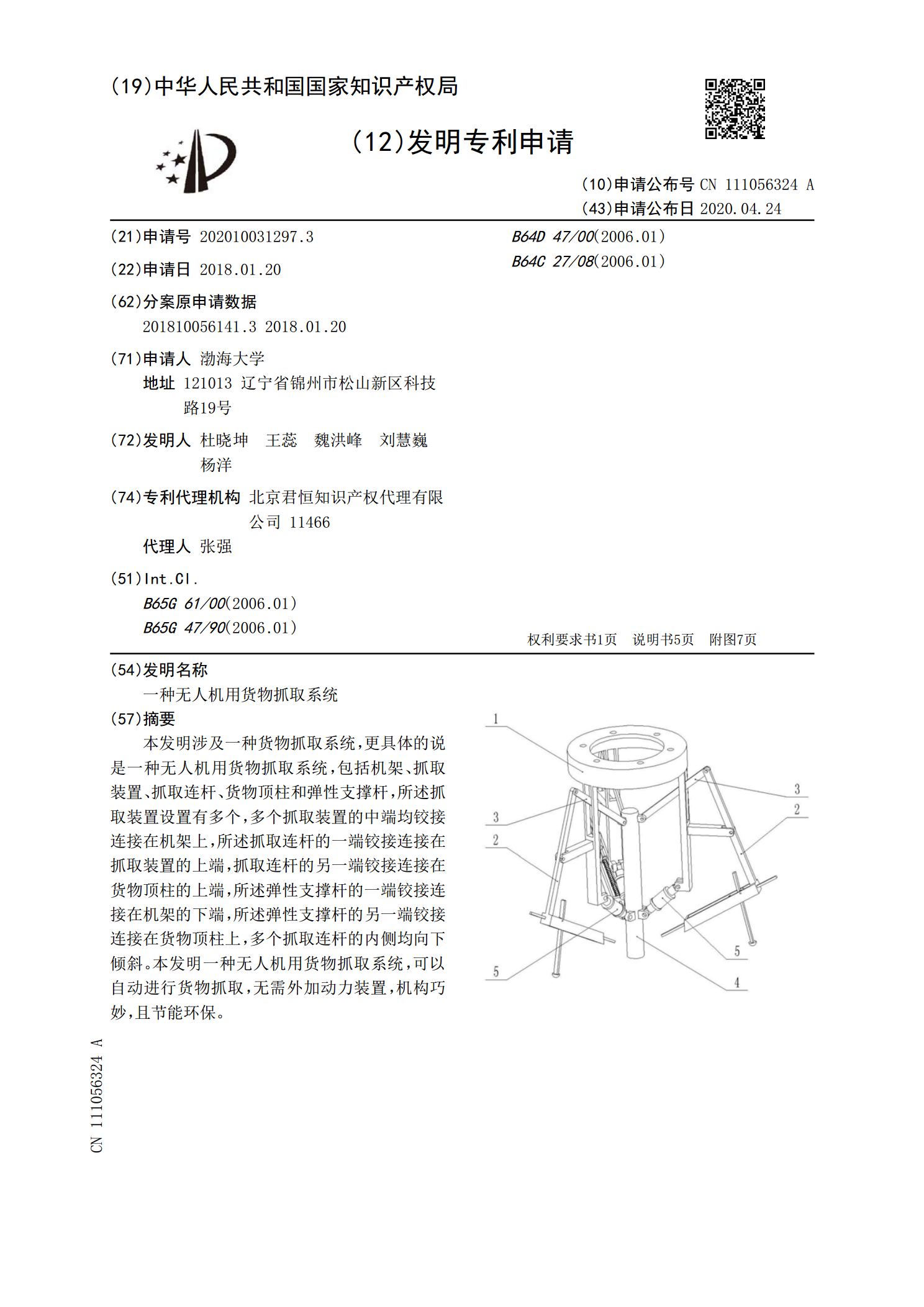
本发明涉及一种货物抓取系统,更具体的说是一种无人机用货物抓取系统,包括机架、抓取装置、抓取连杆、货物顶柱和弹性支撑杆,所述抓取装置设置有多个,多个抓取装置的中端均铰接连接在机架上,所述抓取连杆的一端铰接连接在抓取装置的上端,抓取连杆的另一端铰接连接在货物顶柱的上端,所述弹性支撑杆的一端铰接连接在机架的下端,所述弹性支撑杆的另一端铰接连接在货物顶柱上,多个抓取连杆的内侧均向下倾斜。本发明一种无人机用货物抓取系统,可以自动进行货物抓取,无需外加动力装置,机构巧妙,且节能环保。
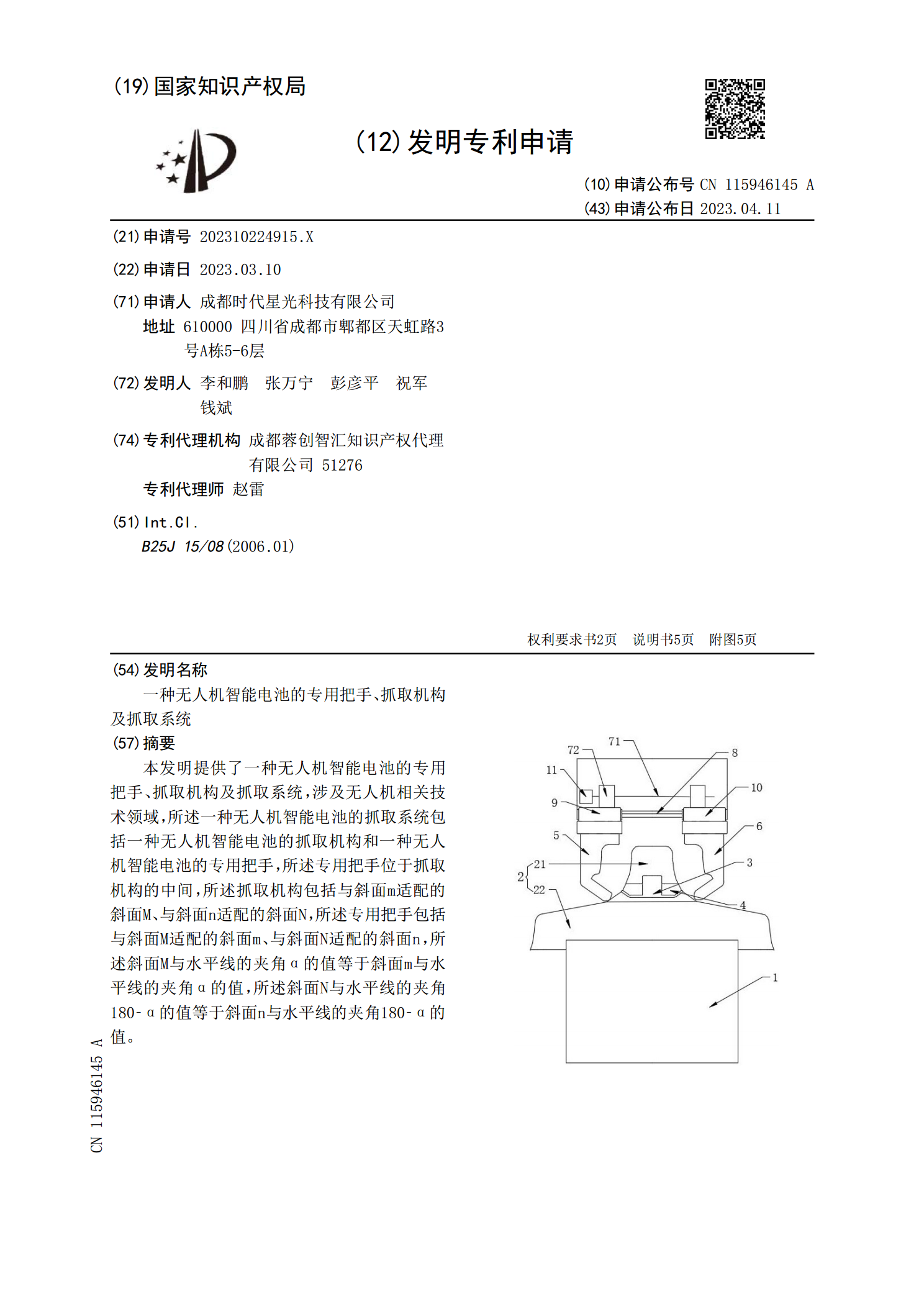
一种无人机智能电池的专用把手、抓取机构及抓取系统.pdf
本发明提供了一种无人机智能电池的专用把手、抓取机构及抓取系统,涉及无人机相关技术领域,所述一种无人机智能电池的抓取系统包括一种无人机智能电池的抓取机构和一种无人机智能电池的专用把手,所述专用把手位于抓取机构的中间,所述抓取机构包括与斜面m适配的斜面M、与斜面n适配的斜面N,所述专用把手包括与斜面M适配的斜面m、与斜面N适配的斜面n,所述斜面M与水平线的夹角α的值等于斜面m与水平线的夹角α的值,所述斜面N与水平线的夹角180‑α的值等于斜面n与水平线的夹角180‑α的值。
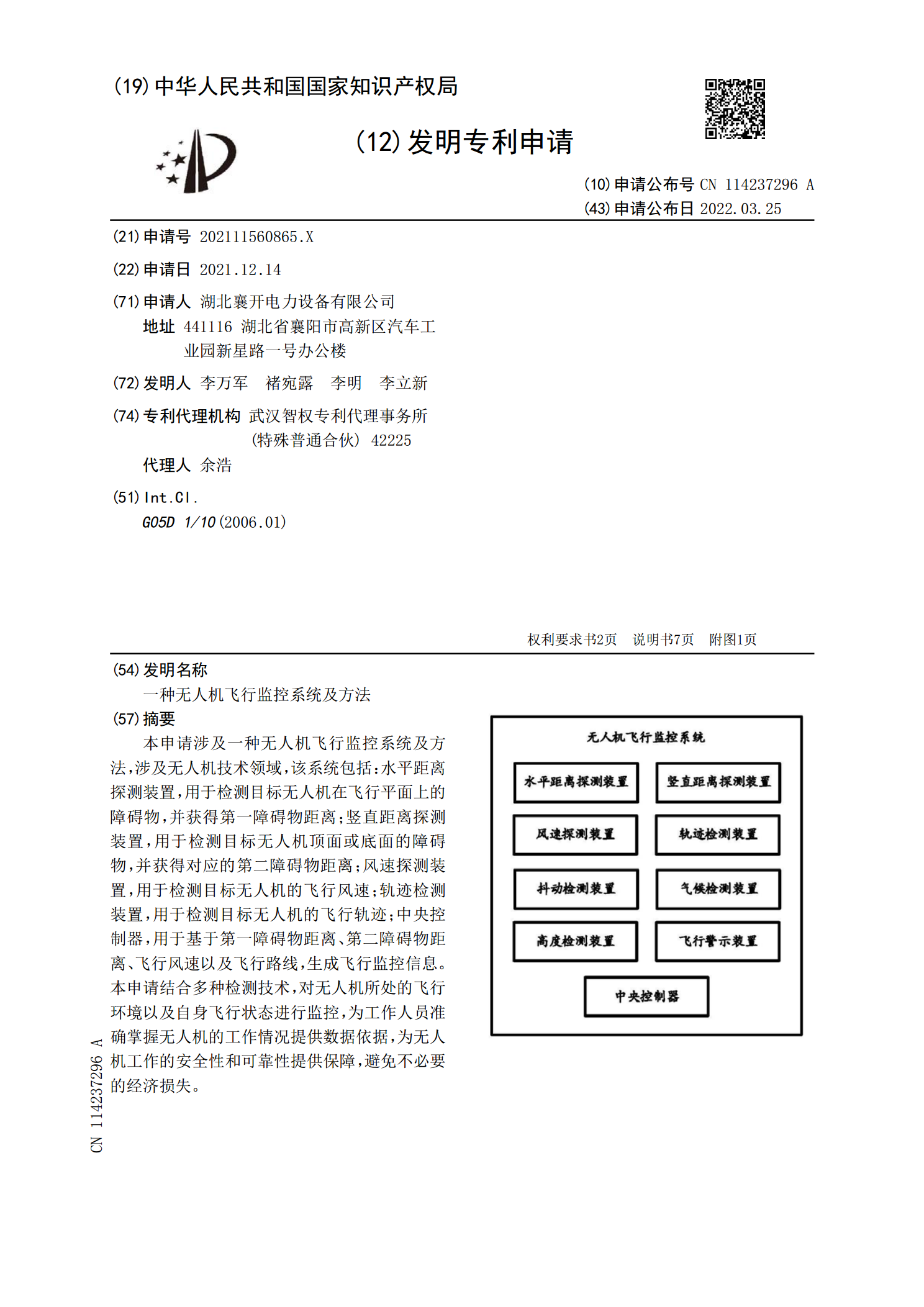
一种无人机飞行监控系统及方法.pdf
本申请涉及一种无人机飞行监控系统及方法,涉及无人机技术领域,该系统包括:水平距离探测装置,用于检测目标无人机在飞行平面上的障碍物,并获得第一障碍物距离;竖直距离探测装置,用于检测目标无人机顶面或底面的障碍物,并获得对应的第二障碍物距离;风速探测装置,用于检测目标无人机的飞行风速;轨迹检测装置,用于检测目标无人机的飞行轨迹;中央控制器,用于基于第一障碍物距离、第二障碍物距离、飞行风速以及飞行路线,生成飞行监控信息。本申请结合多种检测技术,对无人机所处的飞行环境以及自身飞行状态进行监控,为工作人员准确掌握无人
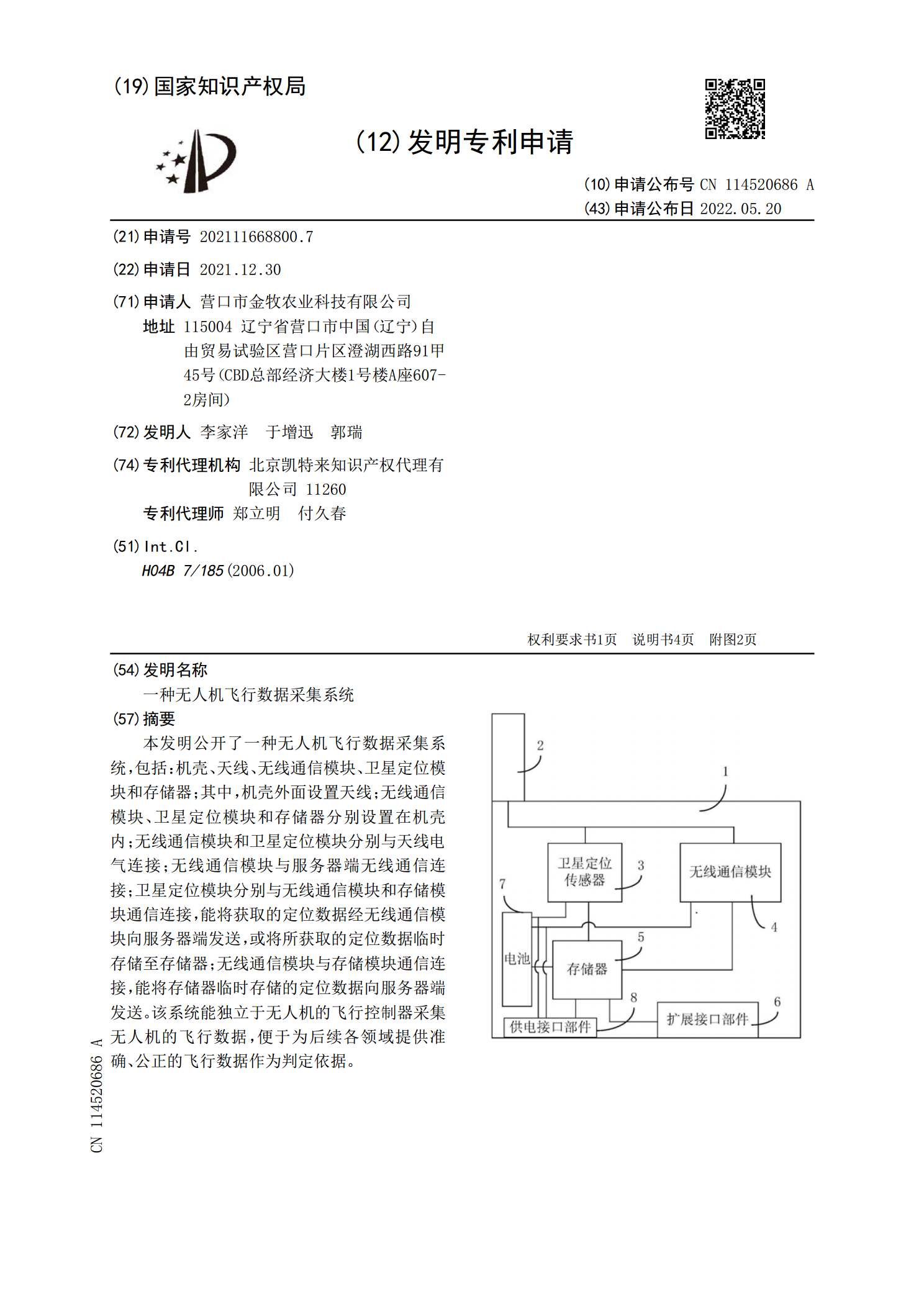
一种无人机飞行数据采集系统.pdf
本发明公开了一种无人机飞行数据采集系统,包括:机壳、天线、无线通信模块、卫星定位模块和存储器;其中,机壳外面设置天线;无线通信模块、卫星定位模块和存储器分别设置在机壳内;无线通信模块和卫星定位模块分别与天线电气连接;无线通信模块与服务器端无线通信连接;卫星定位模块分别与无线通信模块和存储模块通信连接,能将获取的定位数据经无线通信模块向服务器端发送,或将所获取的定位数据临时存储至存储器;无线通信模块与存储模块通信连接,能将存储器临时存储的定位数据向服务器端发送。该系统能独立于无人机的飞行控制器采集无人机的飞