
一种基于标记码的AGV小车导航修正方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于标记码的AGV小车导航修正方法.docx
一种基于标记码的AGV小车导航修正方法摘要:随着工业自动化和机器人技术的发展,越来越多的企业开始使用AGV(自动导引车)辅助生产线,实现自动化生产。然而,AGV小车在运行过程中可能会受到外界干扰而导致误差,导致缺乏精准的导航。本文提出一种基于标记码的AGV小车导航修正方法。该方法通过识别标记码并根据标记码信息来进行导航修正,可以提高AGV小车的精度和稳定性,实现更加智能化和高效的生产。关键词:AGV小车、导航修正、标记码、精度、稳定性1.引言自主移动小车在工业自动化领域的应用越来越广泛,其中AGV(自动导
一种AGV小车导航方法.pdf
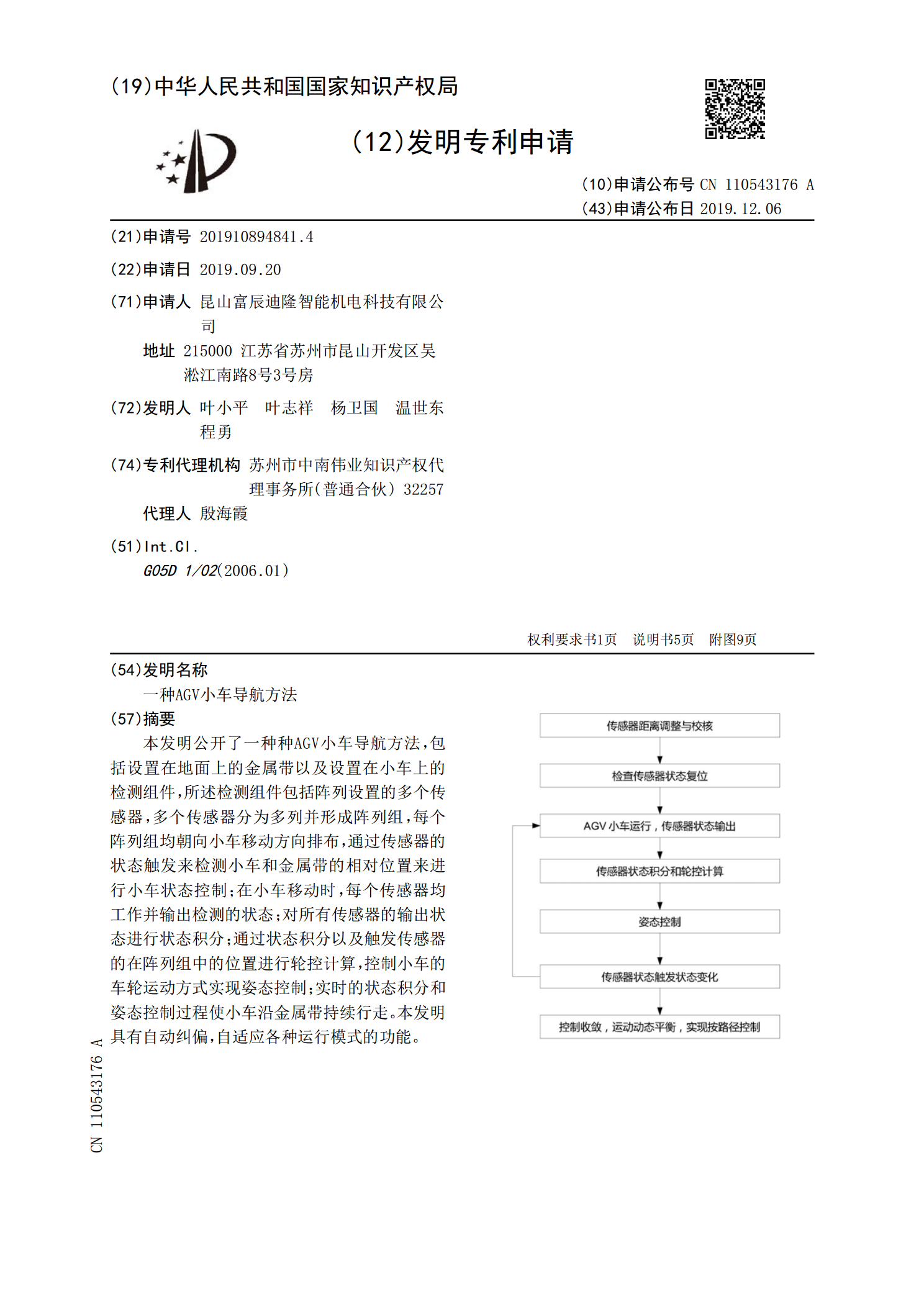
本发明公开了一种种AGV小车导航方法,包括设置在地面上的金属带以及设置在小车上的检测组件,所述检测组件包括阵列设置的多个传感器,多个传感器分为多列并形成阵列组,每个阵列组均朝向小车移动方向排布,通过传感器的状态触发来检测小车和金属带的相对位置来进行小车状态控制;在小车移动时,每个传感器均工作并输出检测的状态;对所有传感器的输出状态进行状态积分;通过状态积分以及触发传感器的在阵列组中的位置进行轮控计算,控制小车的车轮运动方式实现姿态控制;实时的状态积分和姿态控制过程使小车沿金属带持续行走。本发明具有自动纠偏
一种基于AGV小车的对接定位校准方法及AGV小车.pdf
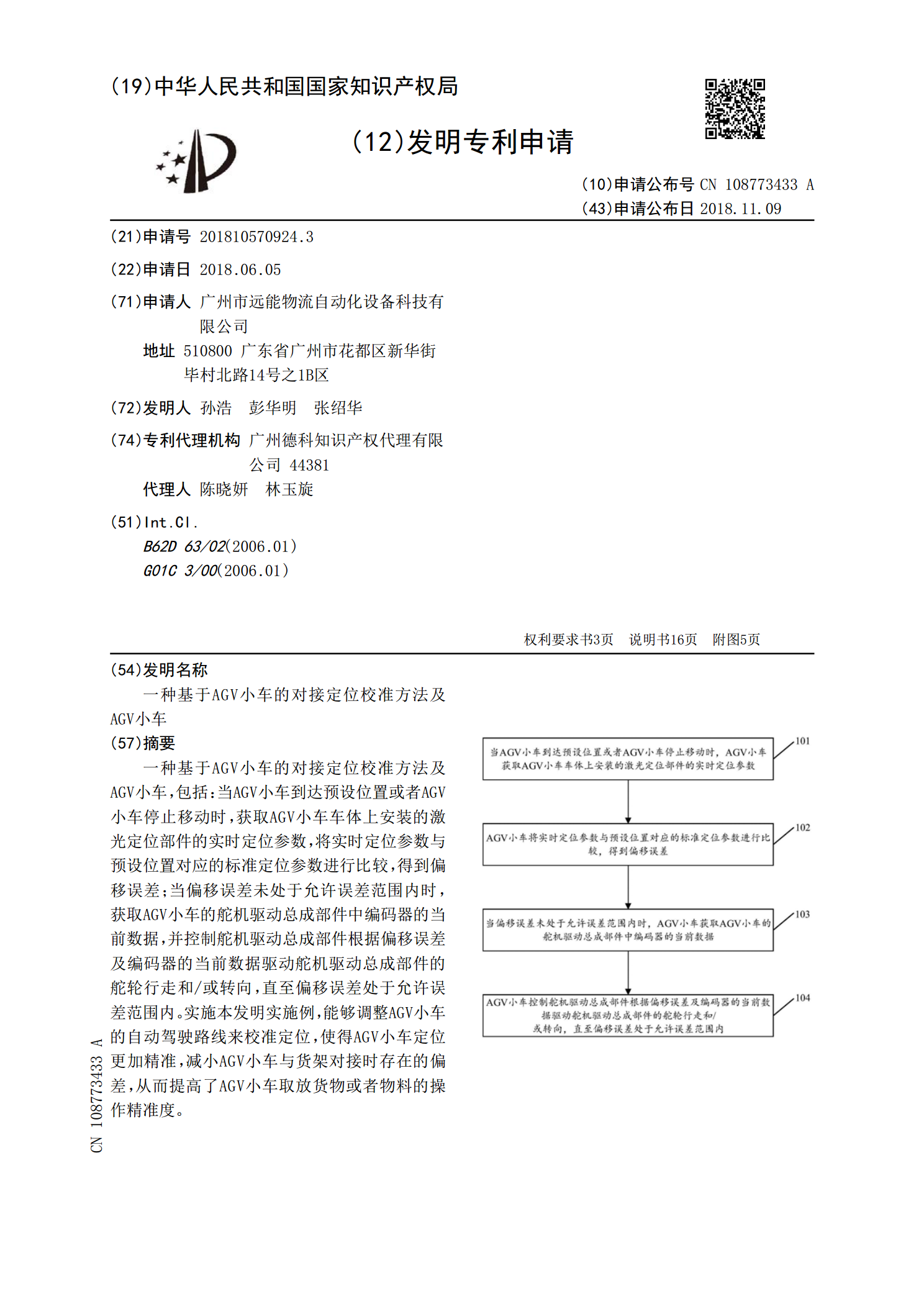
一种基于AGV小车的对接定位校准方法及AGV小车,包括:当AGV小车到达预设位置或者AGV小车停止移动时,获取AGV小车车体上安装的激光定位部件的实时定位参数,将实时定位参数与预设位置对应的标准定位参数进行比较,得到偏移误差;当偏移误差未处于允许误差范围内时,获取AGV小车的舵机驱动总成部件中编码器的当前数据,并控制舵机驱动总成部件根据偏移误差及编码器的当前数据驱动舵机驱动总成部件的舵轮行走和/或转向,直至偏移误差处于允许误差范围内。实施本发明实施例,能够调整AGV小车的自动驾驶路线来校准定位,使得AGV
AGV小车的激光雷达安装位置修正方法以及AGV小车.pdf
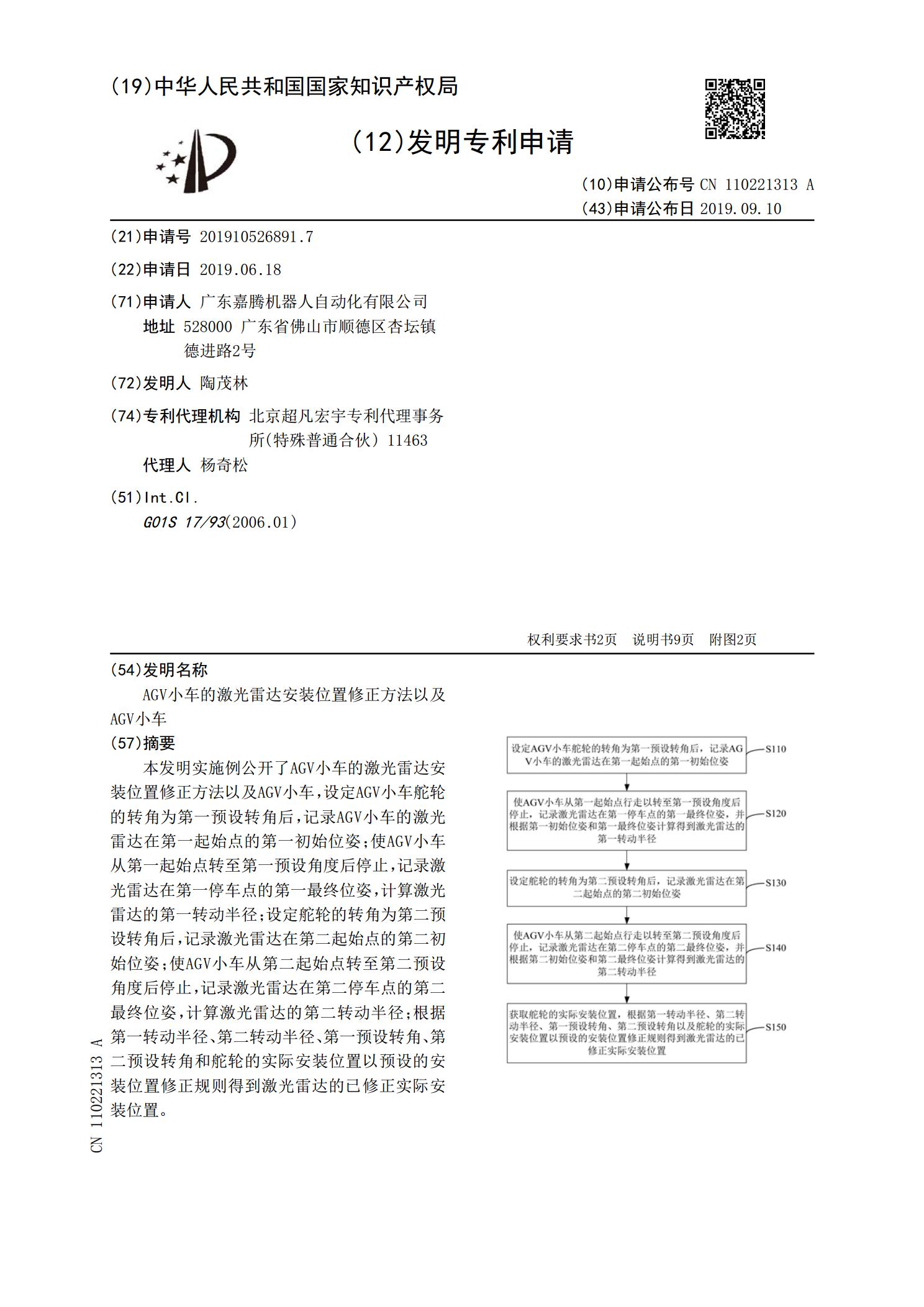
本发明实施例公开了AGV小车的激光雷达安装位置修正方法以及AGV小车,设定AGV小车舵轮的转角为第一预设转角后,记录AGV小车的激光雷达在第一起始点的第一初始位姿;使AGV小车从第一起始点转至第一预设角度后停止,记录激光雷达在第一停车点的第一最终位姿,计算激光雷达的第一转动半径;设定舵轮的转角为第二预设转角后,记录激光雷达在第二起始点的第二初始位姿;使AGV小车从第二起始点转至第二预设角度后停止,记录激光雷达在第二停车点的第二最终位姿,计算激光雷达的第二转动半径;根据第一转动半径、第二转动半径、第一预设转

AGV小车自适应导航方法及系统.pdf
本发明涉及一种AGV小车自适应导航方法及系统,包括建立原始数据库,对AGV小车运行过程中的行走距离及AGV小车的左、右轮差速比进行采样;及左、右轮差速比信息传输至原始数据库,原始数据库将接受的信息与正常行驶的AGV小车的左、右轮差速比进行比对,发出故障报警信号,且将差值信号发送至处理模块,处理模块接收差值信号后进行处理,并发出信号至控制单元,控制单元发出控制信号用于调节AGV小车的左、右轮速度,从而实现AGV小车自适应调整,或者检修操作。