
一种AGV小车导航方法.pdf

灵波****ng


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种AGV小车导航方法.pdf
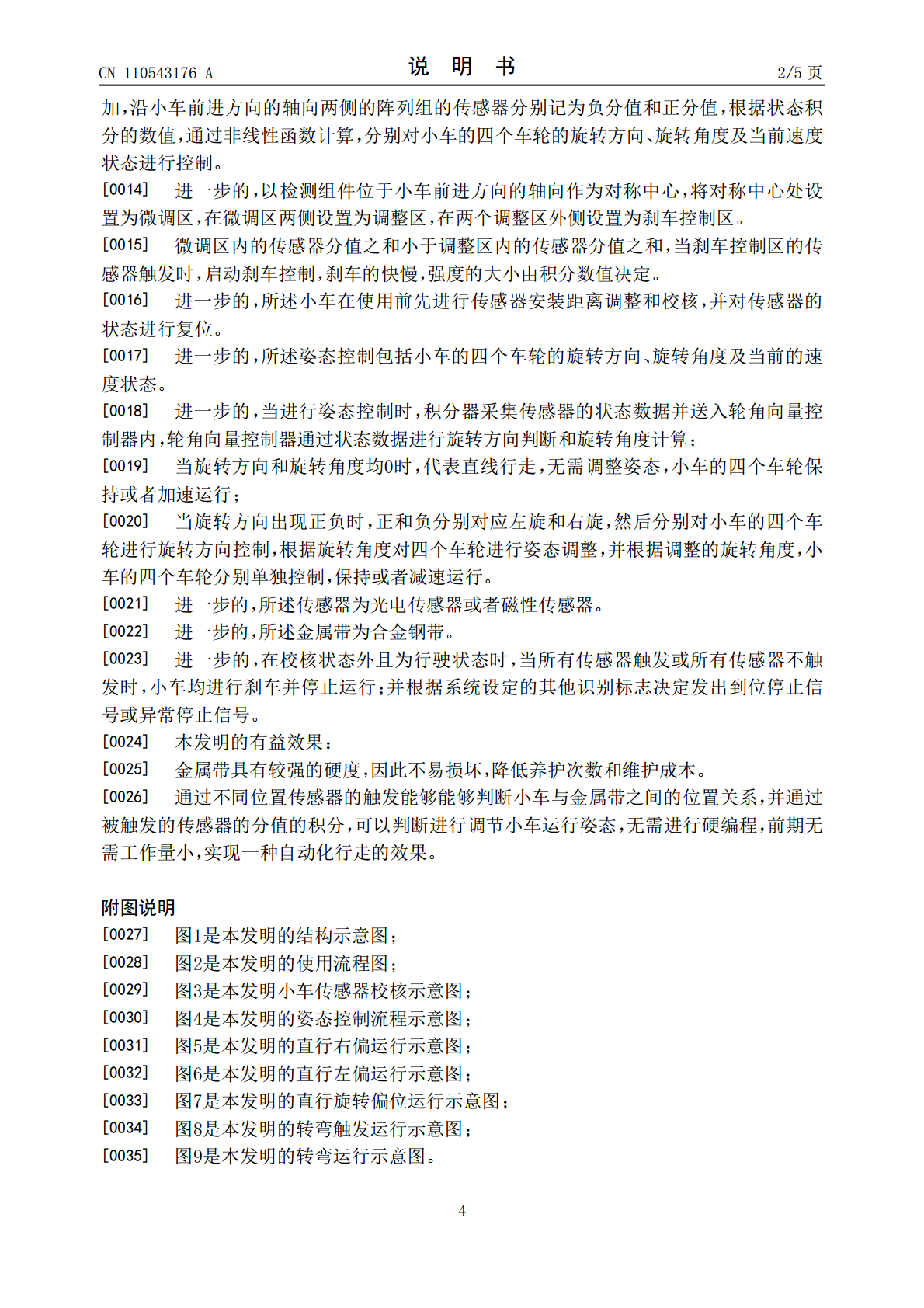
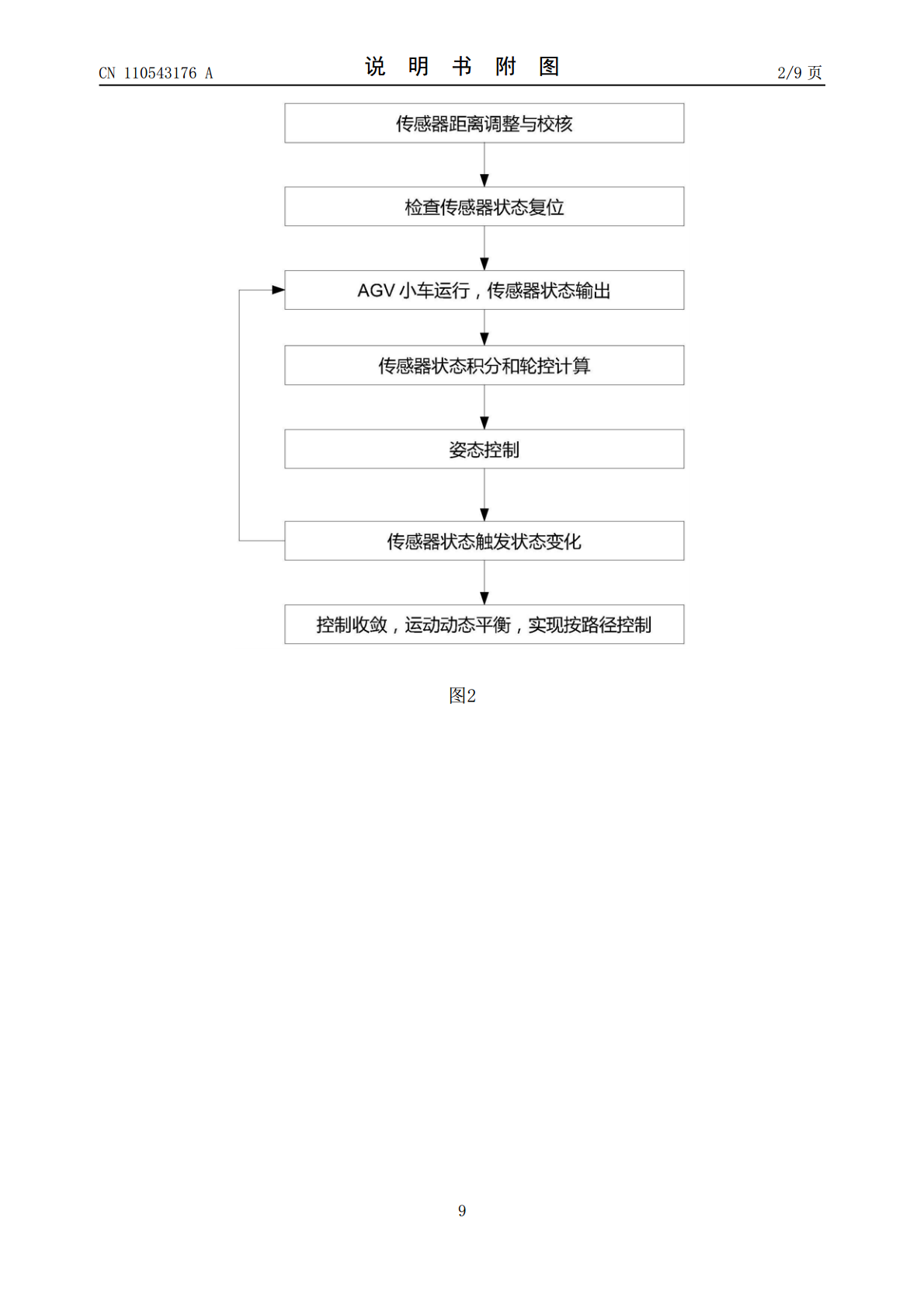
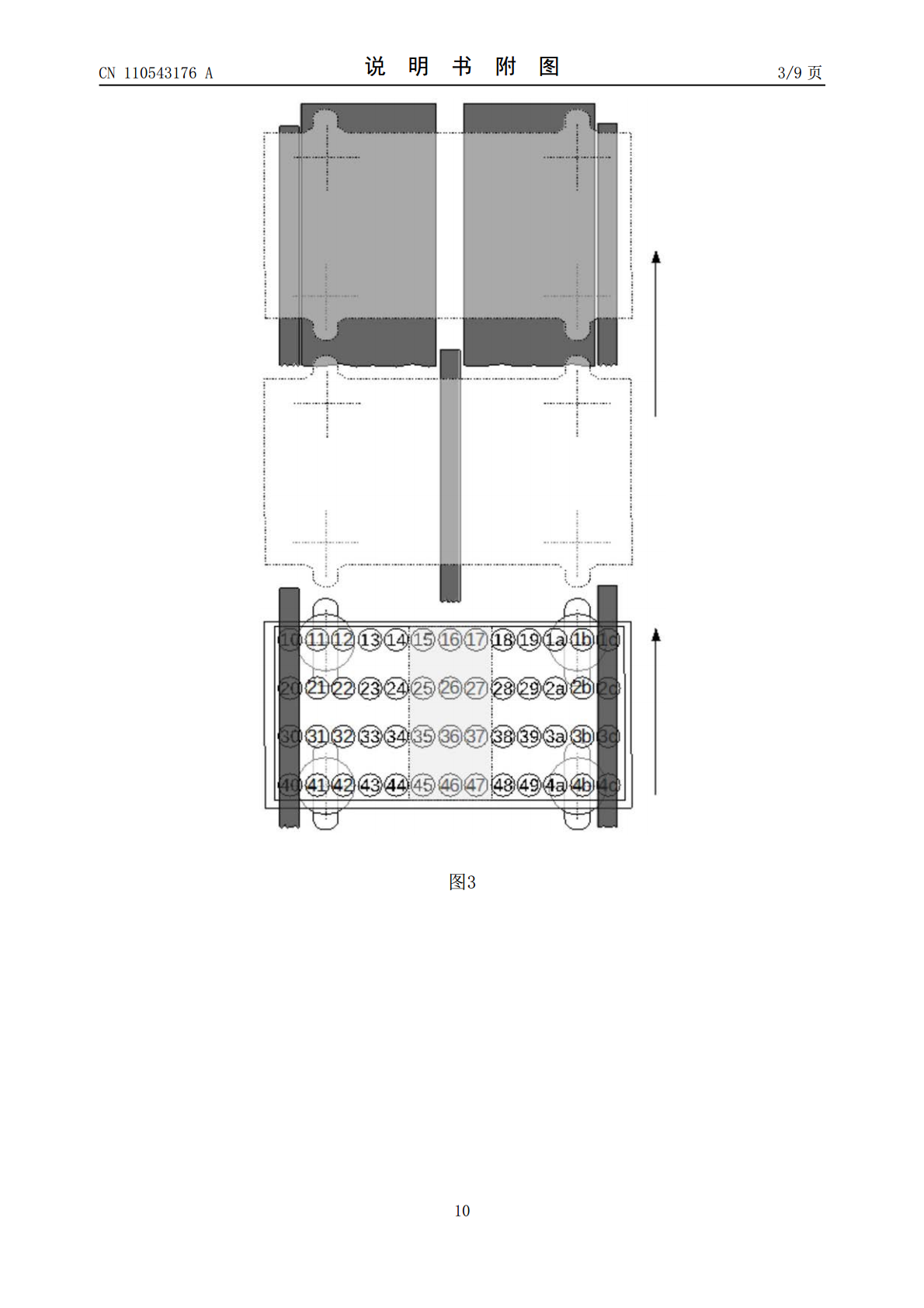
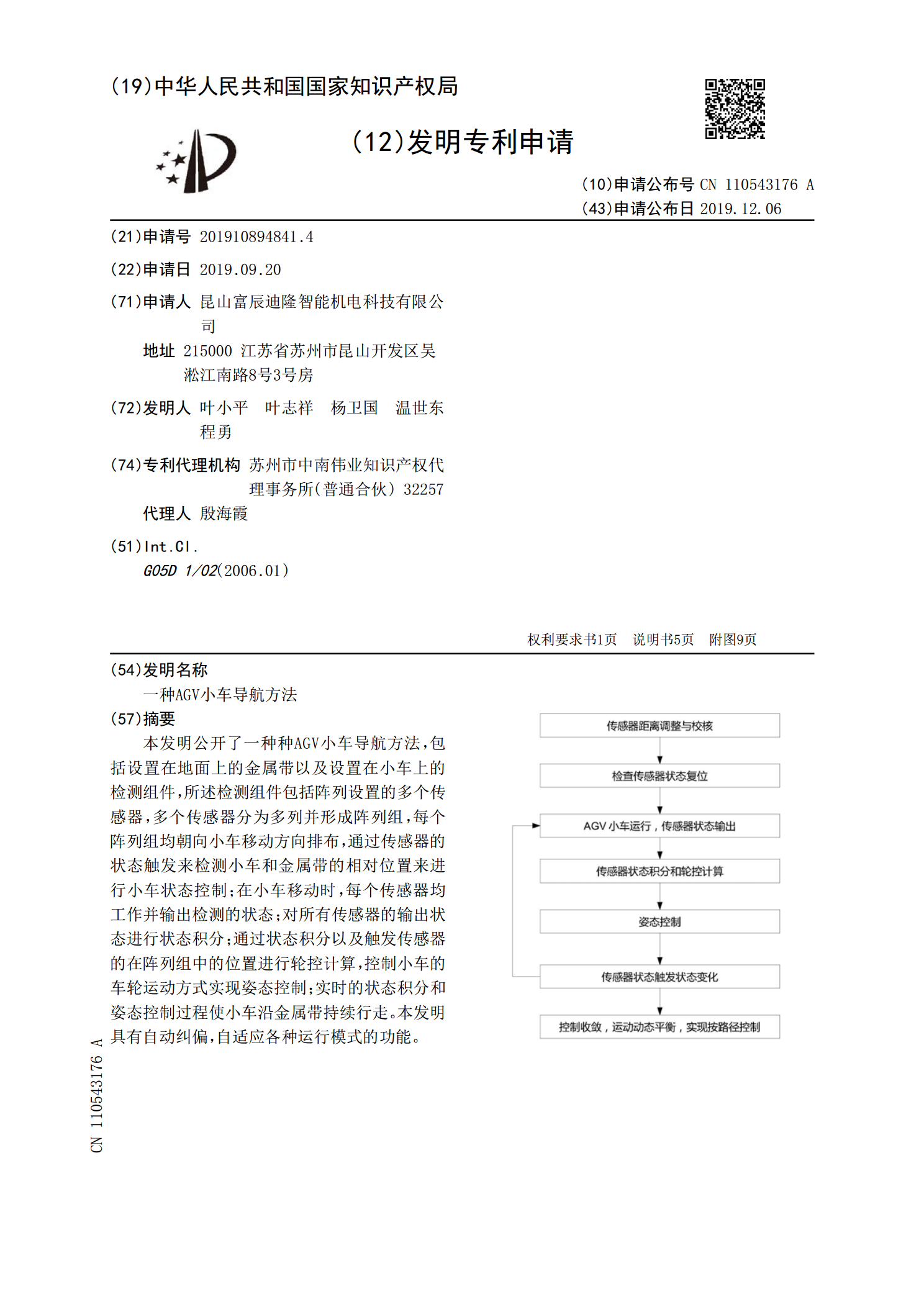
本发明公开了一种种AGV小车导航方法,包括设置在地面上的金属带以及设置在小车上的检测组件,所述检测组件包括阵列设置的多个传感器,多个传感器分为多列并形成阵列组,每个阵列组均朝向小车移动方向排布,通过传感器的状态触发来检测小车和金属带的相对位置来进行小车状态控制;在小车移动时,每个传感器均工作并输出检测的状态;对所有传感器的输出状态进行状态积分;通过状态积分以及触发传感器的在阵列组中的位置进行轮控计算,控制小车的车轮运动方式实现姿态控制;实时的状态积分和姿态控制过程使小车沿金属带持续行走。本发明具有自动纠偏

AGV小车自适应导航方法及系统.pdf
本发明涉及一种AGV小车自适应导航方法及系统,包括建立原始数据库,对AGV小车运行过程中的行走距离及AGV小车的左、右轮差速比进行采样;及左、右轮差速比信息传输至原始数据库,原始数据库将接受的信息与正常行驶的AGV小车的左、右轮差速比进行比对,发出故障报警信号,且将差值信号发送至处理模块,处理模块接收差值信号后进行处理,并发出信号至控制单元,控制单元发出控制信号用于调节AGV小车的左、右轮速度,从而实现AGV小车自适应调整,或者检修操作。

一种潜入式AGV导航小车及其控制方法.pdf
一种潜入式AGV导航小车,包括车体焊接结构及外壳、报警防撞保护装置、升降定位锁定装置、驱动单元、控制单元、导航定位装置、万向从动轮、定向轮。车体焊接结构固定AGV各单元与装置,报警防撞保护装置包括障碍识别感应器、防撞胶条、声光感应器、显示屏、急停开关、前盖,升降定位锁定装置包括升降杆、升降电机、升降杆套、弹簧限位板、销轴挡板及固定钣金;地轮驱动装置设置左右二轮对称于车体中间,采用差速驱动方式;控制单元使用基于ARM双处理器的控制系统,包括控制板、电机驱动、驱动器固定板、ARM处理器、蓄电池、电池承载座。以

一种自动导航AGV运输小车.pdf
本发明公开了一种自动导航AGV运输小车,包括AGV小车和RFID标签;所述的AGV小车主要由控制器、RFID读写器、前轮、前轮驱动装置、充电电池、后轮驱动装置、后轮、车架、减震弹簧、货物板、货物后挡板、货物侧挡板组成;所述的AGV小车行走的道路上铺有RFID标签;所述的RFID读写器可以阅读铺设在仓库道路上的RFID标签,并将阅读的RFID标签的数据传送给控制器,控制器通过接收的RFID标签的数据信息计算出AGV小车的位置;所述的控制器根据系统预设的目的地位置向前轮驱动装置发送指令,驱动前轮转动改变AGV

一种基于标记码的AGV小车导航修正方法.docx
一种基于标记码的AGV小车导航修正方法摘要:随着工业自动化和机器人技术的发展,越来越多的企业开始使用AGV(自动导引车)辅助生产线,实现自动化生产。然而,AGV小车在运行过程中可能会受到外界干扰而导致误差,导致缺乏精准的导航。本文提出一种基于标记码的AGV小车导航修正方法。该方法通过识别标记码并根据标记码信息来进行导航修正,可以提高AGV小车的精度和稳定性,实现更加智能化和高效的生产。关键词:AGV小车、导航修正、标记码、精度、稳定性1.引言自主移动小车在工业自动化领域的应用越来越广泛,其中AGV(自动导