
带有双杆臂的履带式移动机器人自主攀爬楼梯控制方法.pdf

文阁****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

带有双杆臂的履带式移动机器人自主攀爬楼梯控制方法.pdf
本发明公开了一种履带式移动机器人爬楼梯的控制方法,所述履带式移动机器人包括前轮、后轮以及包覆在所述前轮和后轮上的履带,其特征在于:在所述前轮设置有转动角度可控的双杆臂,通过调整所述双杆臂的转角逐步提升所述履带式移动机器人的重心位置完成攀爬。本发明提出的一种攀爬台阶的控制方法,适用于相对尺寸较小,无法通过传统的控制方法实现自主攀爬台阶的小型履带式移动机器人。本发明提出的一种新的控制方法能够实现小型履带式移动机器人攀爬楼梯的功能。机器人在攀爬楼梯的过程中,机器人通过自身所携带的传感器实现自主控制,则能有效地避

带双杆臂的履带式移动机器人自主下楼梯的控制方法.pdf
本发明公开了一种履带式移动机器人自主下楼梯的控制方法,所述履带式移动机器人包括前轮、后轮以及包覆在所述前轮和后轮上的履带,其特征在于:在所述前轮设置有转动角度可控的双杆臂,在所述双杆臂的旋转轴两端分别设置一个用于检测双杆臂每个杆臂力矩的三轴力传感器,通过调整所述双杆臂的转角逐步降低沿着楼梯边移动的履带式移动机器人前轮与下阶台阶踏步面的距离。本发明提出的是一种自主下楼的柔顺控制方法,这一过程使得机器人在从楼梯平面到水平面的过程中始终保持运动的平稳,避免了直接摔下楼梯造成的刚性冲击和对移动机器人本体及搭载物的
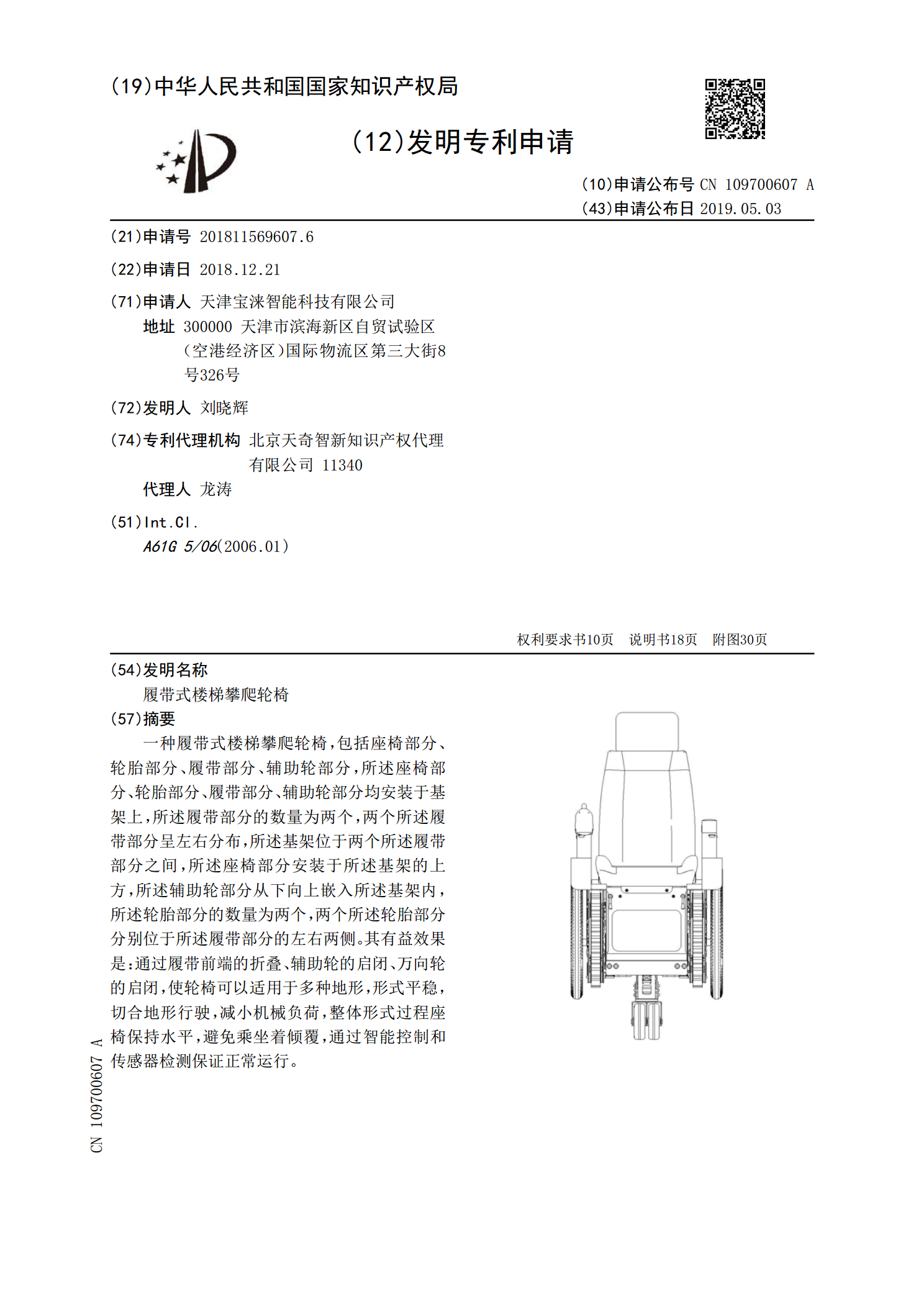
履带式楼梯攀爬轮椅.pdf
一种履带式楼梯攀爬轮椅,包括座椅部分、轮胎部分、履带部分、辅助轮部分,所述座椅部分、轮胎部分、履带部分、辅助轮部分均安装于基架上,所述履带部分的数量为两个,两个所述履带部分呈左右分布,所述基架位于两个所述履带部分之间,所述座椅部分安装于所述基架的上方,所述辅助轮部分从下向上嵌入所述基架内,所述轮胎部分的数量为两个,两个所述轮胎部分分别位于所述履带部分的左右两侧。其有益效果是:通过履带前端的折叠、辅助轮的启闭、万向轮的启闭,使轮椅可以适用于多种地形,形式平稳,切合地形行驶,减小机械负荷,整体形式过程座椅保持
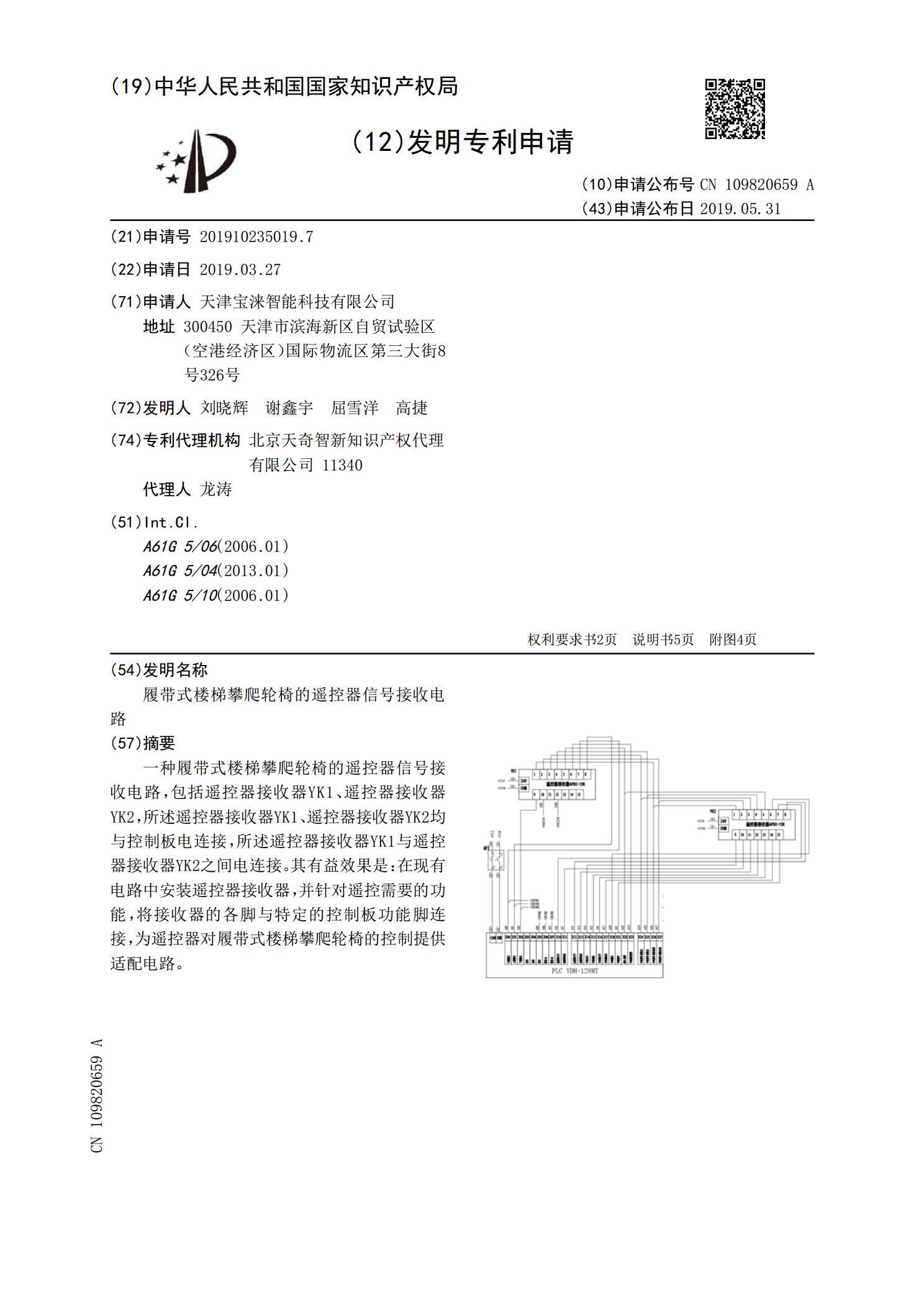
履带式楼梯攀爬轮椅的遥控器信号接收电路.pdf
一种履带式楼梯攀爬轮椅的遥控器信号接收电路,包括遥控器接收器YK1、遥控器接收器YK2,所述遥控器接收器YK1、遥控器接收器YK2均与控制板电连接,所述遥控器接收器YK1与遥控器接收器YK2之间电连接。其有益效果是:在现有电路中安装遥控器接收器,并针对遥控需要的功能,将接收器的各脚与特定的控制板功能脚连接,为遥控器对履带式楼梯攀爬轮椅的控制提供适配电路。

一种小型双摆臂履带式移动机器人平台.pdf
本发明公开了一种小型双摆臂履带式移动机器人平台,包括:车体框架、行走驱动系统、行走轮系、摆臂驱动系统和摆臂轮系;其中,行走驱动系统和摆臂驱动系统安装在车体框架的底部,车体框架的两侧各安装有一套行走轮系,行走轮系的前进端设置有可调节的摆臂轮系;该机器人平台还包括摆臂传动轴、电路板组、电池组、传输天线、鱼眼镜头和声波感应器;摆臂传动轴和电路板组设置在车体框架的底部,摆臂传动轴用于连接摆臂驱动系统和摆臂轮系;电池组设置有两组,分别对称设置在车体框架的两侧;传输天线设置在车体框架上,鱼眼镜头和声波感应器设置在车体