
带双杆臂的履带式移动机器人自主下楼梯的控制方法.pdf

东耀****哥哥


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

带双杆臂的履带式移动机器人自主下楼梯的控制方法.pdf
本发明公开了一种履带式移动机器人自主下楼梯的控制方法,所述履带式移动机器人包括前轮、后轮以及包覆在所述前轮和后轮上的履带,其特征在于:在所述前轮设置有转动角度可控的双杆臂,在所述双杆臂的旋转轴两端分别设置一个用于检测双杆臂每个杆臂力矩的三轴力传感器,通过调整所述双杆臂的转角逐步降低沿着楼梯边移动的履带式移动机器人前轮与下阶台阶踏步面的距离。本发明提出的是一种自主下楼的柔顺控制方法,这一过程使得机器人在从楼梯平面到水平面的过程中始终保持运动的平稳,避免了直接摔下楼梯造成的刚性冲击和对移动机器人本体及搭载物的

带有双杆臂的履带式移动机器人自主攀爬楼梯控制方法.pdf
本发明公开了一种履带式移动机器人爬楼梯的控制方法,所述履带式移动机器人包括前轮、后轮以及包覆在所述前轮和后轮上的履带,其特征在于:在所述前轮设置有转动角度可控的双杆臂,通过调整所述双杆臂的转角逐步提升所述履带式移动机器人的重心位置完成攀爬。本发明提出的一种攀爬台阶的控制方法,适用于相对尺寸较小,无法通过传统的控制方法实现自主攀爬台阶的小型履带式移动机器人。本发明提出的一种新的控制方法能够实现小型履带式移动机器人攀爬楼梯的功能。机器人在攀爬楼梯的过程中,机器人通过自身所携带的传感器实现自主控制,则能有效地避

一种小型双摆臂履带式移动机器人平台.pdf
本发明公开了一种小型双摆臂履带式移动机器人平台,包括:车体框架、行走驱动系统、行走轮系、摆臂驱动系统和摆臂轮系;其中,行走驱动系统和摆臂驱动系统安装在车体框架的底部,车体框架的两侧各安装有一套行走轮系,行走轮系的前进端设置有可调节的摆臂轮系;该机器人平台还包括摆臂传动轴、电路板组、电池组、传输天线、鱼眼镜头和声波感应器;摆臂传动轴和电路板组设置在车体框架的底部,摆臂传动轴用于连接摆臂驱动系统和摆臂轮系;电池组设置有两组,分别对称设置在车体框架的两侧;传输天线设置在车体框架上,鱼眼镜头和声波感应器设置在车体
一种履带式移动机器人的自主行驶路径跟踪控制方法.pdf
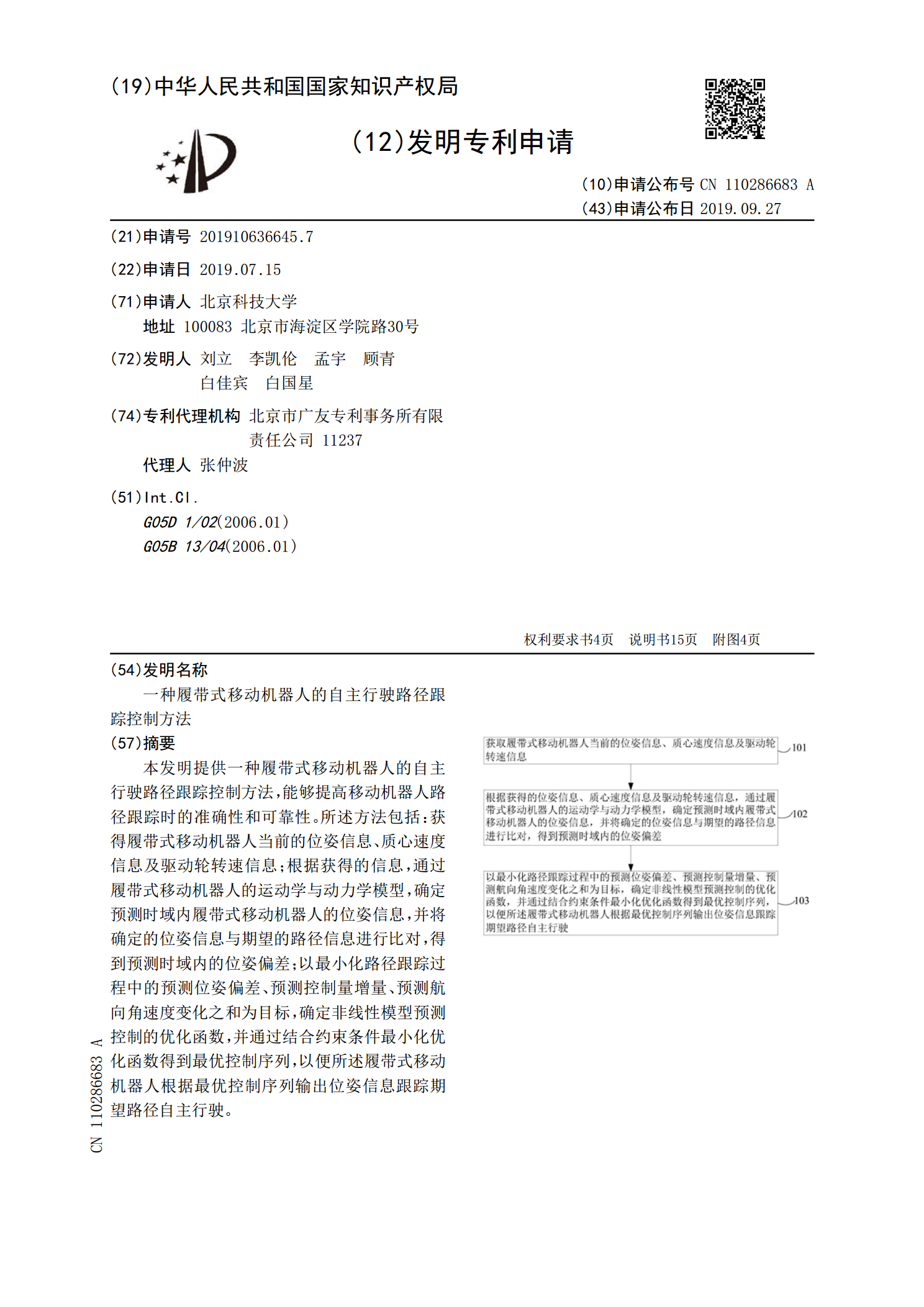
本发明提供一种履带式移动机器人的自主行驶路径跟踪控制方法,能够提高移动机器人路径跟踪时的准确性和可靠性。所述方法包括:获得履带式移动机器人当前的位姿信息、质心速度信息及驱动轮转速信息;根据获得的信息,通过履带式移动机器人的运动学与动力学模型,确定预测时域内履带式移动机器人的位姿信息,并将确定的位姿信息与期望的路径信息进行比对,得到预测时域内的位姿偏差;以最小化路径跟踪过程中的预测位姿偏差、预测控制量增量、预测航向角速度变化之和为目标,确定非线性模型预测控制的优化函数,并通过结合约束条件最小化优化函数得到最

神钢履带式起重机臂杆修复技术.docx
神钢履带式起重机臂杆修复技术神钢履带式起重机臂杆修复技术摘要:随着建筑业的迅速发展和现代化建设的推进,起重机在工地上扮演着不可忽视的角色。然而,长期使用和恶劣的工作条件会导致起重机的臂杆出现磨损、断裂等问题,严重影响工程进度和工作安全。本文主要研究神钢履带式起重机臂杆的修复技术,通过分析其常见的病害和修复方法,提出了一种有效的修复方案,旨在提高起重机的使用寿命和工作效率。关键词:神钢履带式起重机;臂杆;病害;修复技术;使用寿命;工作效率一、引言起重机是重要的现代化工程机械之一,起到了快速、高效完成各种重物