
一种小型双摆臂履带式移动机器人平台.pdf

小琛****82


1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种小型双摆臂履带式移动机器人平台.pdf
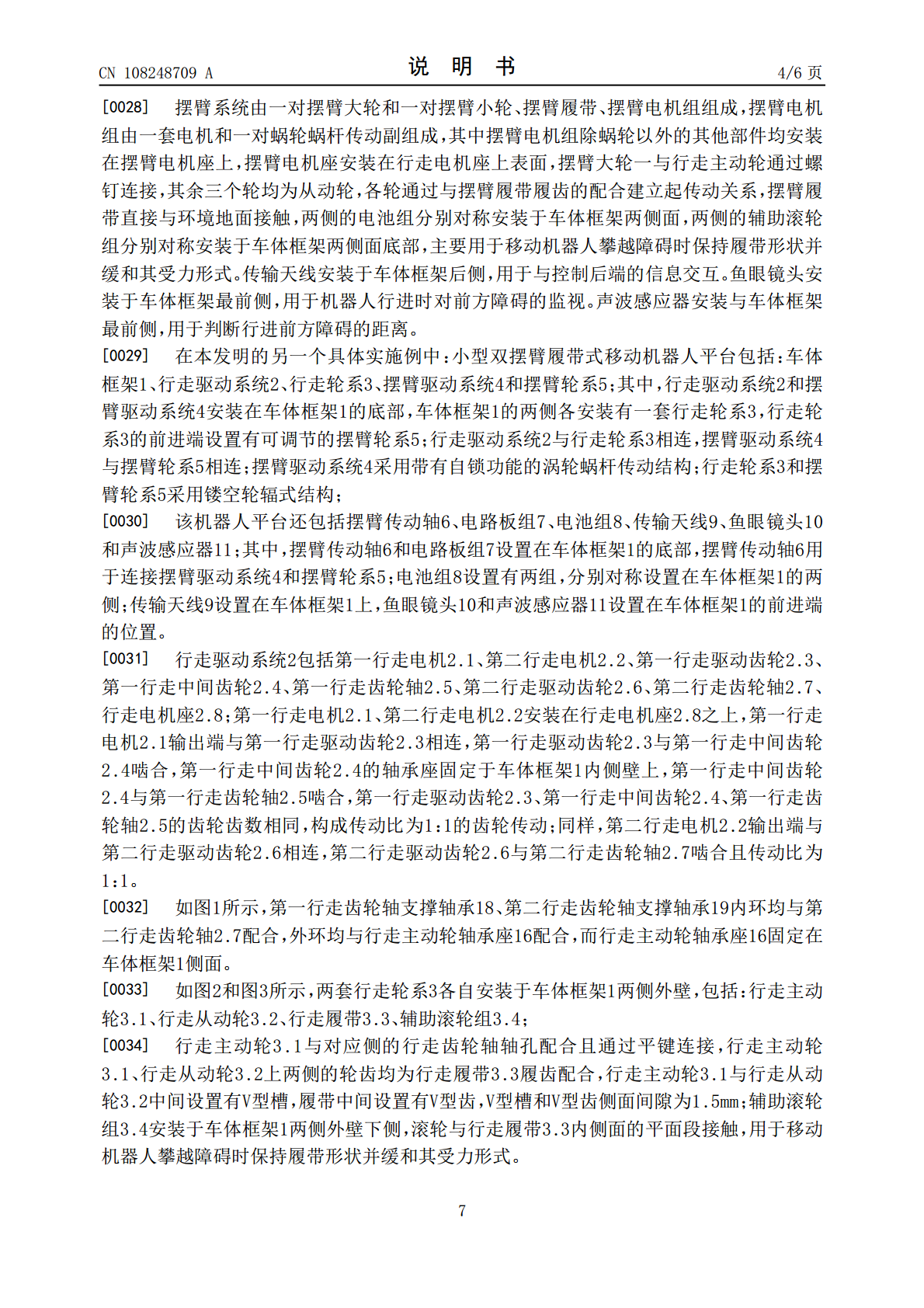
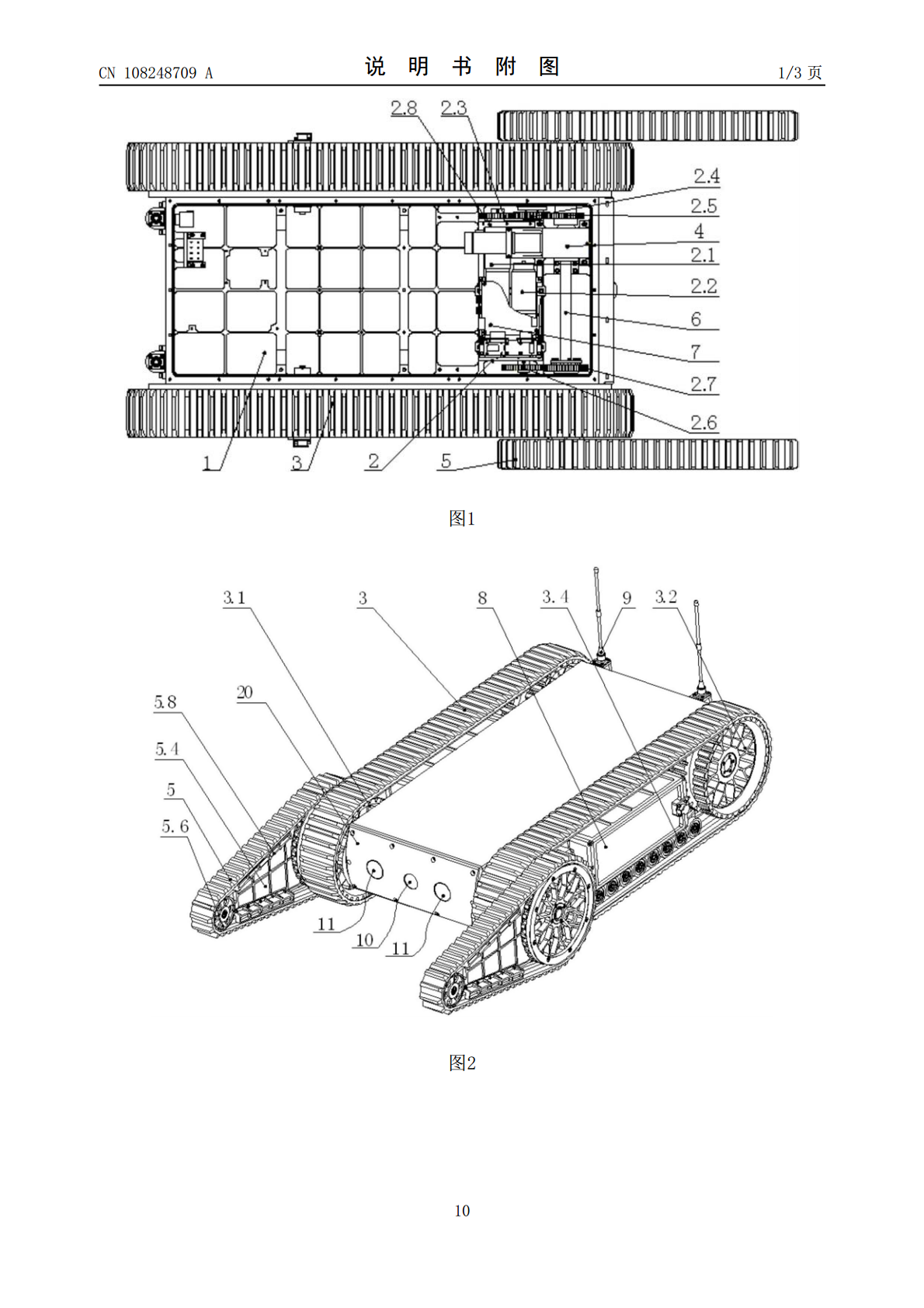
本发明公开了一种小型双摆臂履带式移动机器人平台,包括:车体框架、行走驱动系统、行走轮系、摆臂驱动系统和摆臂轮系;其中,行走驱动系统和摆臂驱动系统安装在车体框架的底部,车体框架的两侧各安装有一套行走轮系,行走轮系的前进端设置有可调节的摆臂轮系;该机器人平台还包括摆臂传动轴、电路板组、电池组、传输天线、鱼眼镜头和声波感应器;摆臂传动轴和电路板组设置在车体框架的底部,摆臂传动轴用于连接摆臂驱动系统和摆臂轮系;电池组设置有两组,分别对称设置在车体框架的两侧;传输天线设置在车体框架上,鱼眼镜头和声波感应器设置在车体
一种双摆臂秋千.pdf
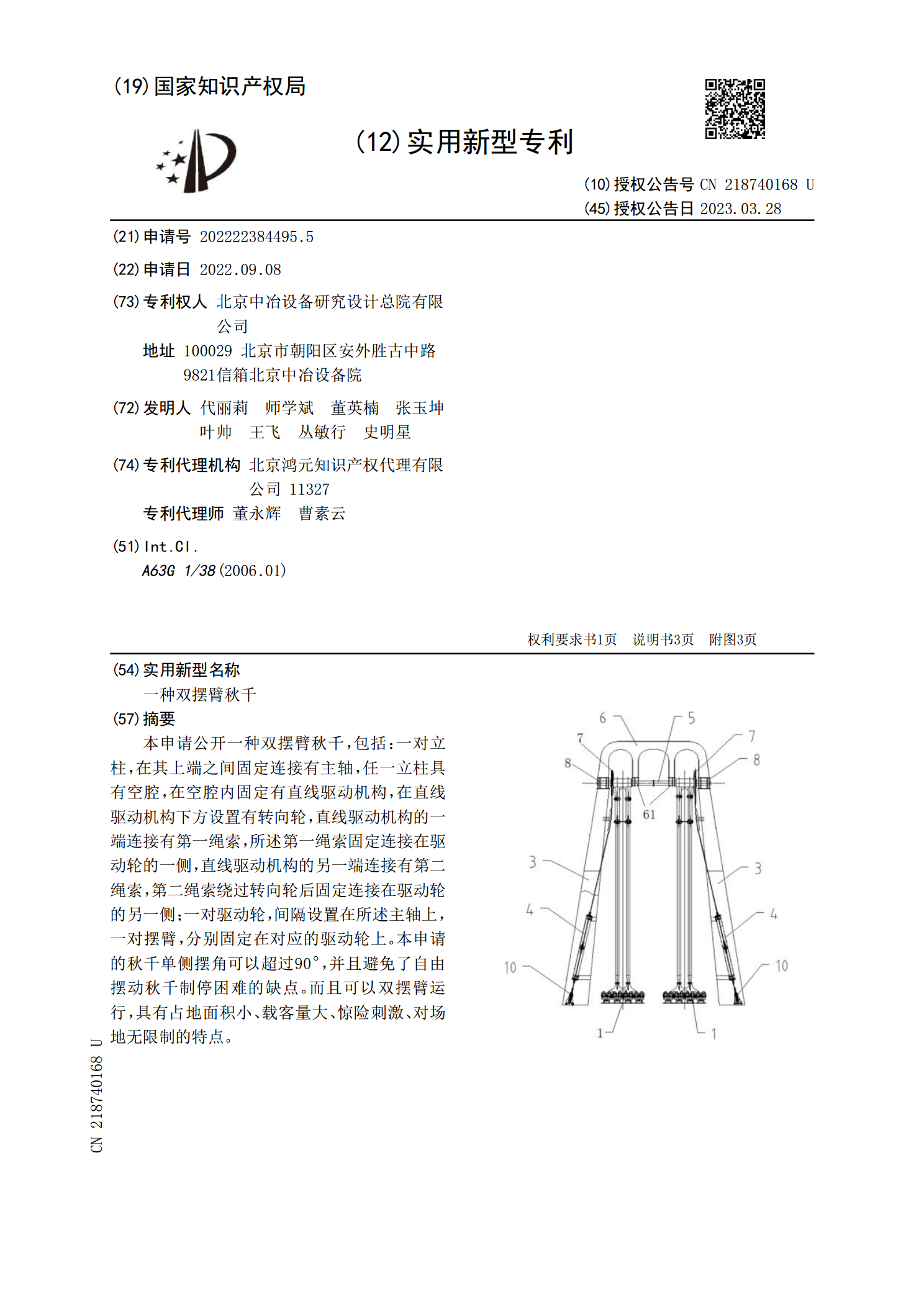
本申请公开一种双摆臂秋千,包括:一对立柱,在其上端之间固定连接有主轴,任一立柱具有空腔,在空腔内固定有直线驱动机构,在直线驱动机构下方设置有转向轮,直线驱动机构的一端连接有第一绳索,所述第一绳索固定连接在驱动轮的一侧,直线驱动机构的另一端连接有第二绳索,第二绳索绕过转向轮后固定连接在驱动轮的另一侧;一对驱动轮,间隔设置在所述主轴上,一对摆臂,分别固定在对应的驱动轮上。本申请的秋千单侧摆角可以超过90°,并且避免了自由摆动秋千制停困难的缺点。而且可以双摆臂运行,具有占地面积小、载客量大、惊险刺激、对场地无限
一种伺服驱动双摆臂装置.pdf
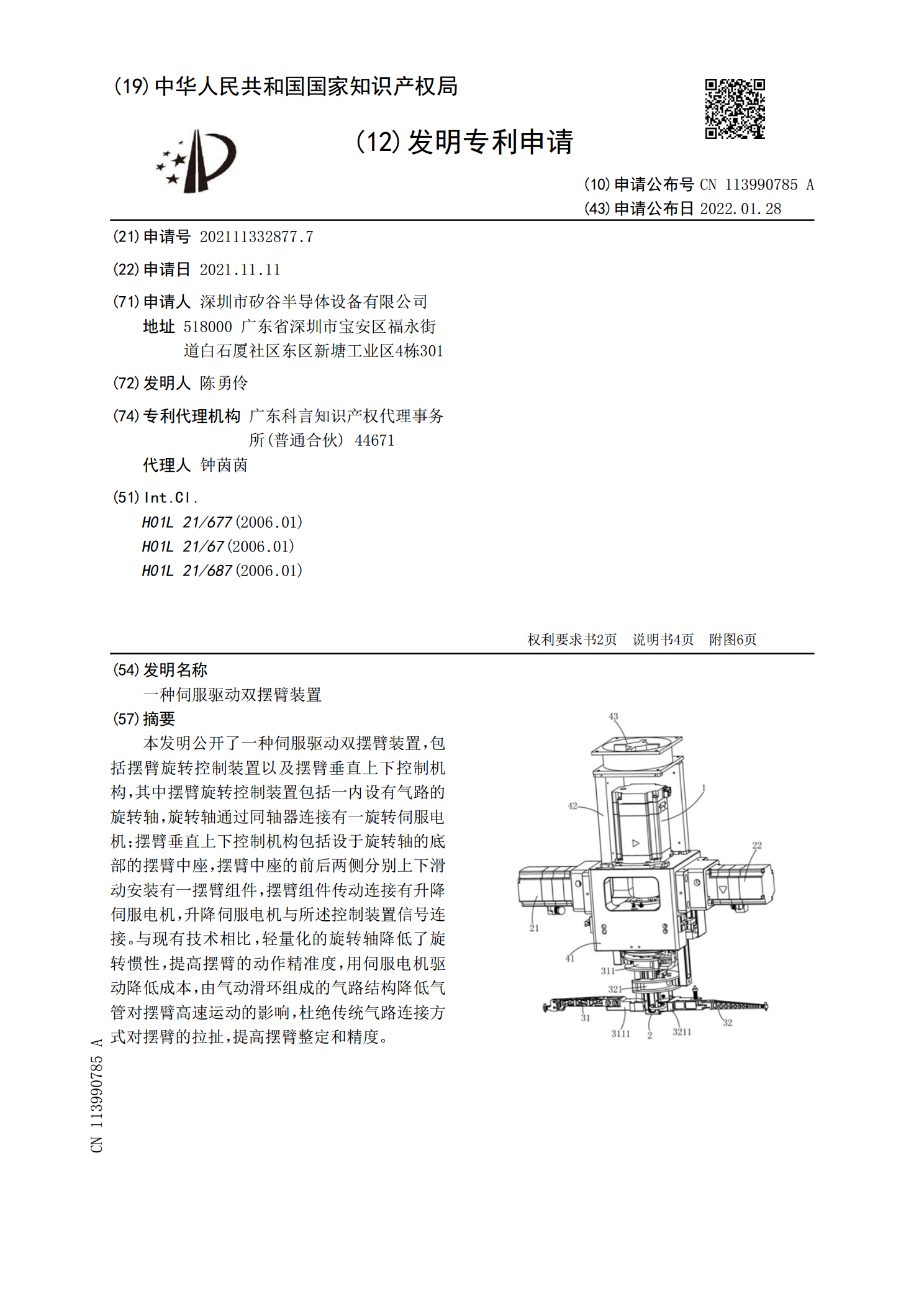
本发明公开了一种伺服驱动双摆臂装置,包括摆臂旋转控制装置以及摆臂垂直上下控制机构,其中摆臂旋转控制装置包括一内设有气路的旋转轴,旋转轴通过同轴器连接有一旋转伺服电机;摆臂垂直上下控制机构包括设于旋转轴的底部的摆臂中座,摆臂中座的前后两侧分别上下滑动安装有一摆臂组件,摆臂组件传动连接有升降伺服电机,升降伺服电机与所述控制装置信号连接。与现有技术相比,轻量化的旋转轴降低了旋转惯性,提高摆臂的动作精准度,用伺服电机驱动降低成本,由气动滑环组成的气路结构降低气管对摆臂高速运动的影响,杜绝传统气路连接方式对摆臂的拉

基于Backstepping方法的海底摆臂型履带式移动平台行走路径控制.docx
基于Backstepping方法的海底摆臂型履带式移动平台行走路径控制基于Backstepping方法的海底摆臂型履带式移动平台行走路径控制摘要随着科技的发展,海底环境的开发和研究日益受到关注。在海底环境中进行工作的机器人需要具备灵活的行走能力,以应对复杂的地形和环境条件。本文提出了一种基于Backstepping方法的海底摆臂型履带式移动平台行走路径控制方法,该方法通过控制机器人的摆臂和履带运动,实现精确的目标位置控制。实验结果表明,该控制方法能够在各种不同的海底环境下实现平稳、高效的路径行走。关键词:

一种双井摆臂式抽油机.pdf
一种双井摆臂式抽油机,包括主体支架,支架固定在基础上,平衡拉杆和支架连接,悬绳器和抽油杆连接,摆臂固定在支架上,紧绳器安装在摆臂上,一号导向轮安装在摆臂上,二号导向轮安装在支架上,组合拉杆与支架和摆臂连接,摩擦轮、离合器和导向轮安装在驱动装置上,摩擦轮和导向轮相连,悬绳器、一号导向轮、摩擦轮、组合配重、紧绳器联接,二号导向轮、三号导向轮、摆臂联接,驱动装置带动两侧抽油杆运动,在单井维修时,驱动装置上的离合器将修井侧的摆臂摆动到垂直位置并实现自锁,为维修吊装留出空间,以上动作完成后,驱动装置带动摩擦轮转动,