
一种可适应不同直径电机转子的自动抓取机械手.pdf

Ch****91


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可适应不同直径电机转子的自动抓取机械手.pdf
本发明公开了一种可适应不同直径电机转子的自动抓取机械手,包括工业机器人、气缸架、平行气缸、第一抓取手指以及第二抓取手指,所述气缸架上安装有至少两个平行气缸,所有平行气缸相对于工业机器人末端的转动中心圆周均匀分布安装;所述第一抓取手指以及第二抓取手指分别固连在平行气缸的两个平动单元上。本发明的可适应不同直径电机转子的自动抓取机械手可适用于不同直径电机转子,在工业机器人带动下壳在不同工位快速抓取、轮换电机转子并在各工位间灵活切换,具有效率高,节约人力成本、结构简单成本相对较低等诸多优点。
一种可翻转自动抓取机械手.pdf
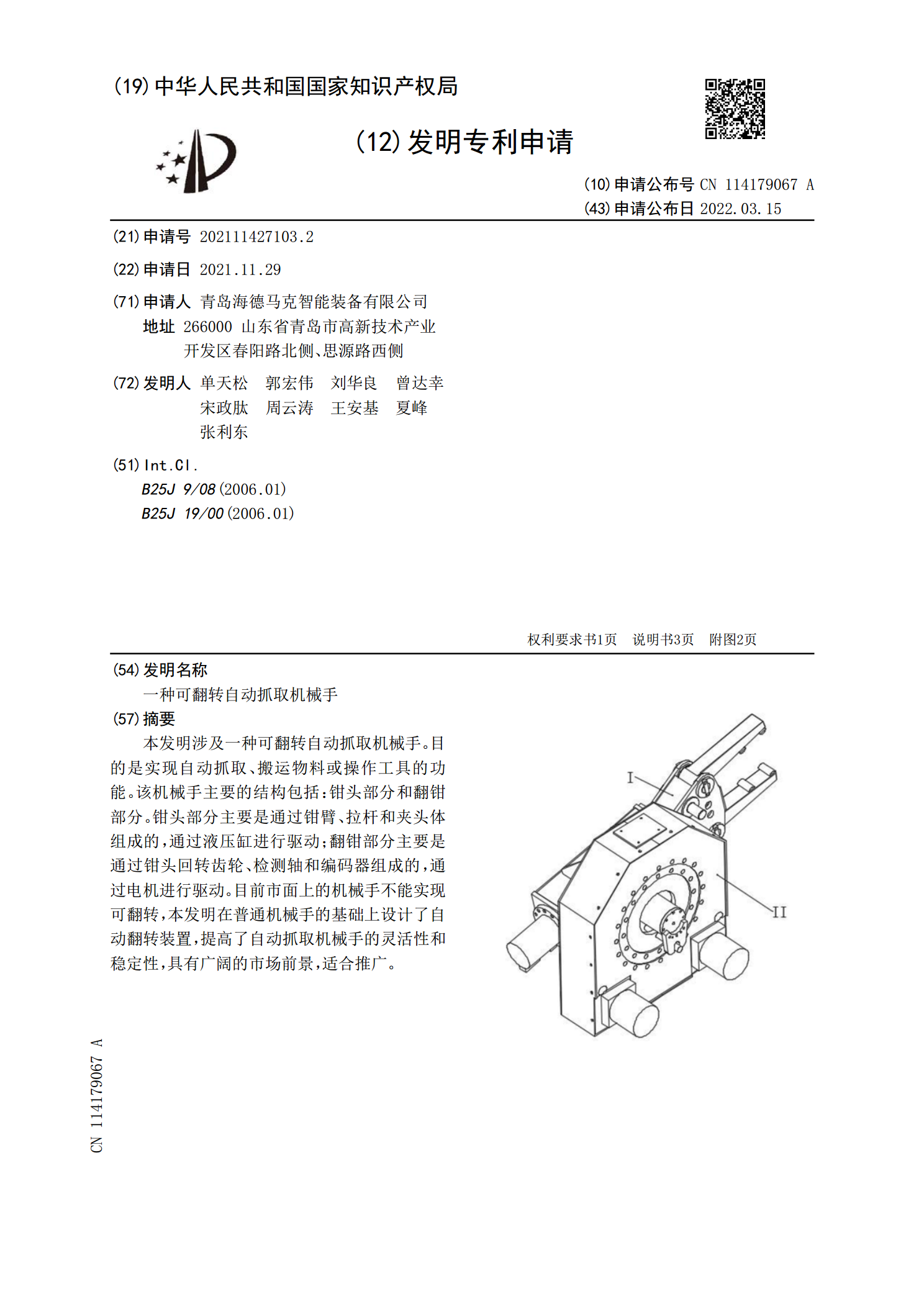
本发明涉及一种可翻转自动抓取机械手。目的是实现自动抓取、搬运物料或操作工具的功能。该机械手主要的结构包括:钳头部分和翻钳部分。钳头部分主要是通过钳臂、拉杆和夹头体组成的,通过液压缸进行驱动;翻钳部分主要是通过钳头回转齿轮、检测轴和编码器组成的,通过电机进行驱动。目前市面上的机械手不能实现可翻转,本发明在普通机械手的基础上设计了自动翻转装置,提高了自动抓取机械手的灵活性和稳定性,具有广阔的市场前景,适合推广。
一种电机转子加工用自动抓取横向移动机构.pdf
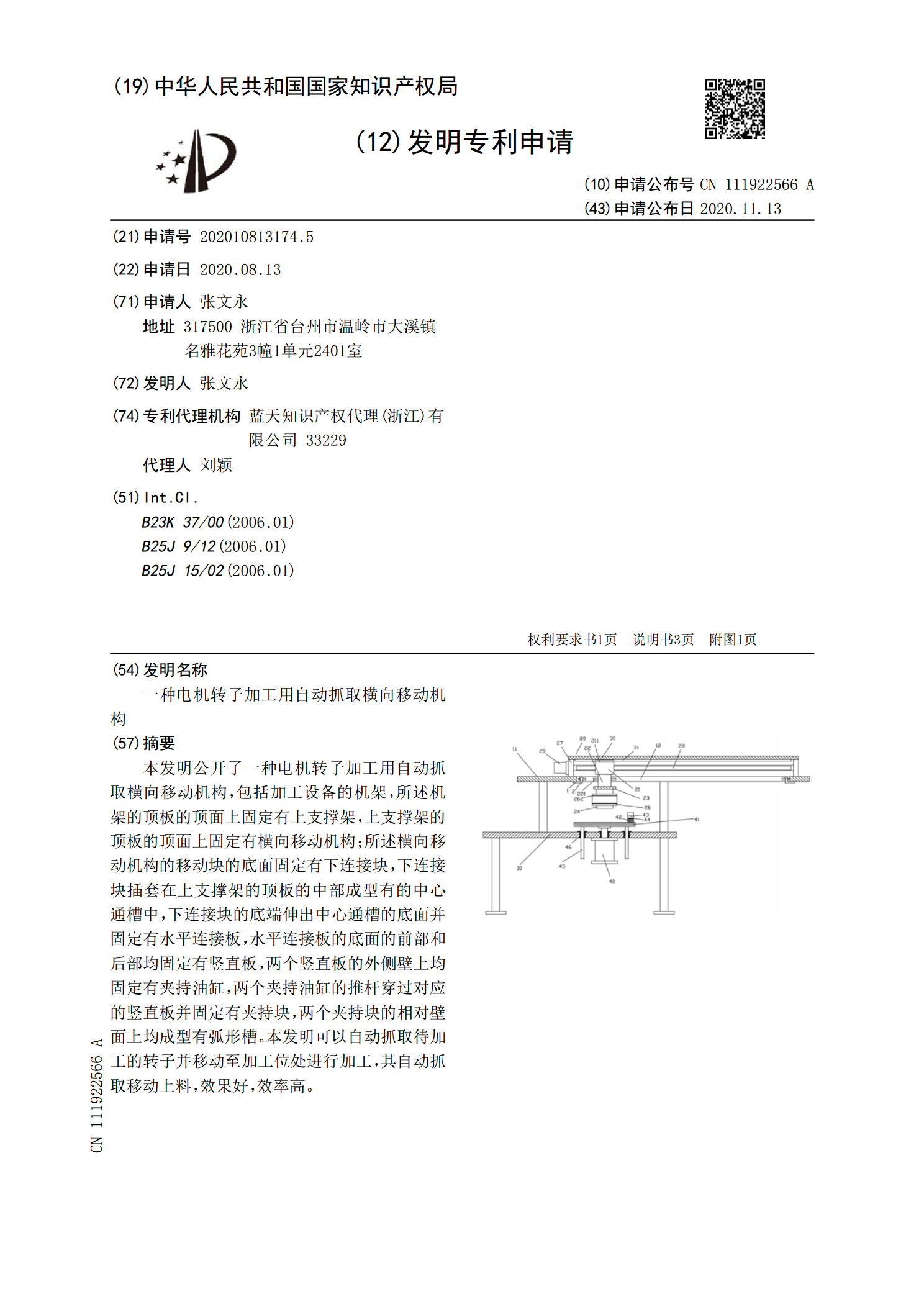
本发明公开了一种电机转子加工用自动抓取横向移动机构,包括加工设备的机架,所述机架的顶板的顶面上固定有上支撑架,上支撑架的顶板的顶面上固定有横向移动机构;所述横向移动机构的移动块的底面固定有下连接块,下连接块插套在上支撑架的顶板的中部成型有的中心通槽中,下连接块的底端伸出中心通槽的底面并固定有水平连接板,水平连接板的底面的前部和后部均固定有竖直板,两个竖直板的外侧壁上均固定有夹持油缸,两个夹持油缸的推杆穿过对应的竖直板并固定有夹持块,两个夹持块的相对壁面上均成型有弧形槽。本发明可以自动抓取待加工的转子并移动
一种自动抓取机械手.pdf
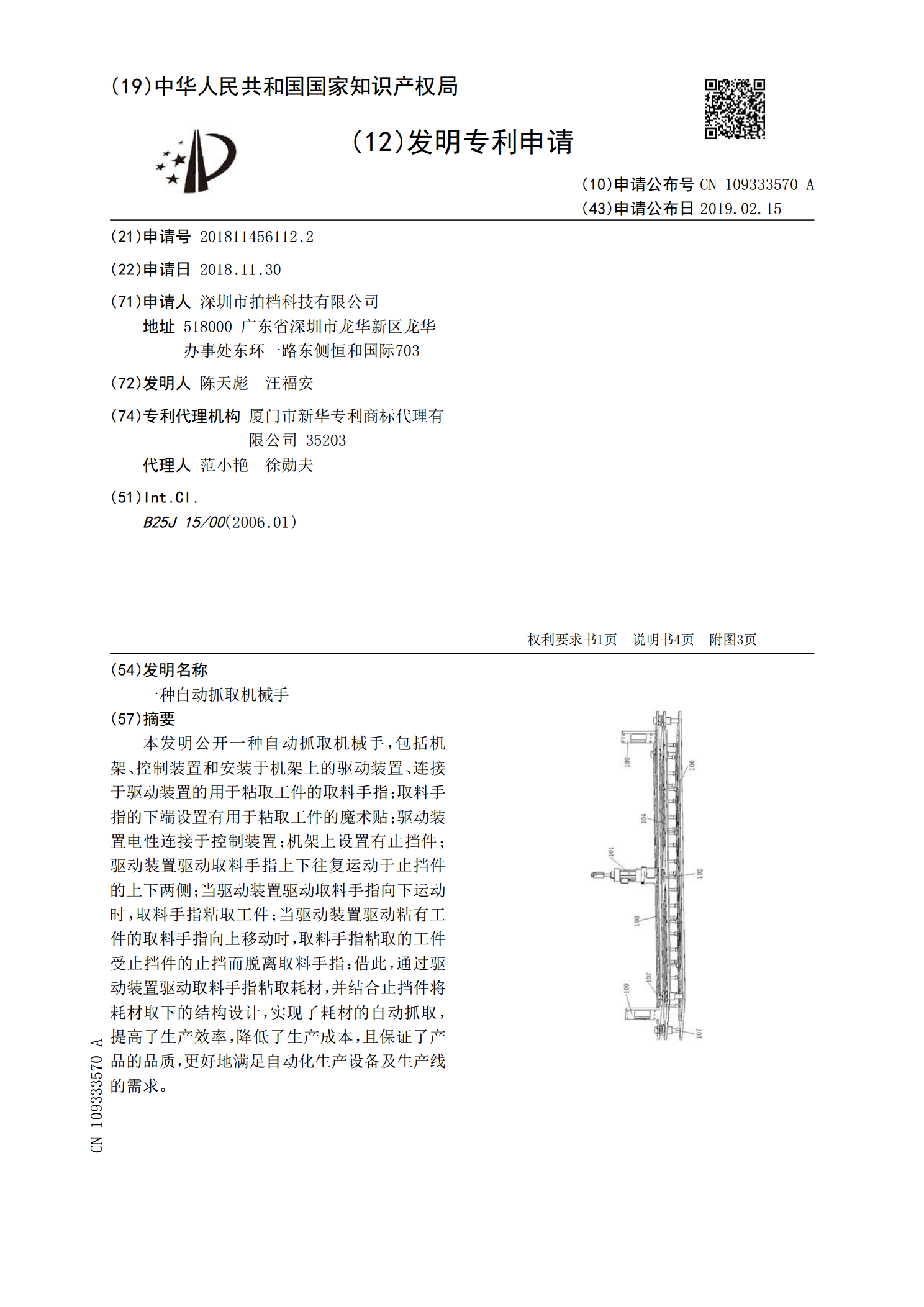
本发明公开一种自动抓取机械手,包括机架、控制装置和安装于机架上的驱动装置、连接于驱动装置的用于粘取工件的取料手指;取料手指的下端设置有用于粘取工件的魔术贴;驱动装置电性连接于控制装置;机架上设置有止挡件;驱动装置驱动取料手指上下往复运动于止挡件的上下两侧;当驱动装置驱动取料手指向下运动时,取料手指粘取工件;当驱动装置驱动粘有工件的取料手指向上移动时,取料手指粘取的工件受止挡件的止挡而脱离取料手指;借此,通过驱动装置驱动取料手指粘取耗材,并结合止挡件将耗材取下的结构设计,实现了耗材的自动抓取,提高了生产效率
一种可适应不同直径UUV的台车支顶.pdf
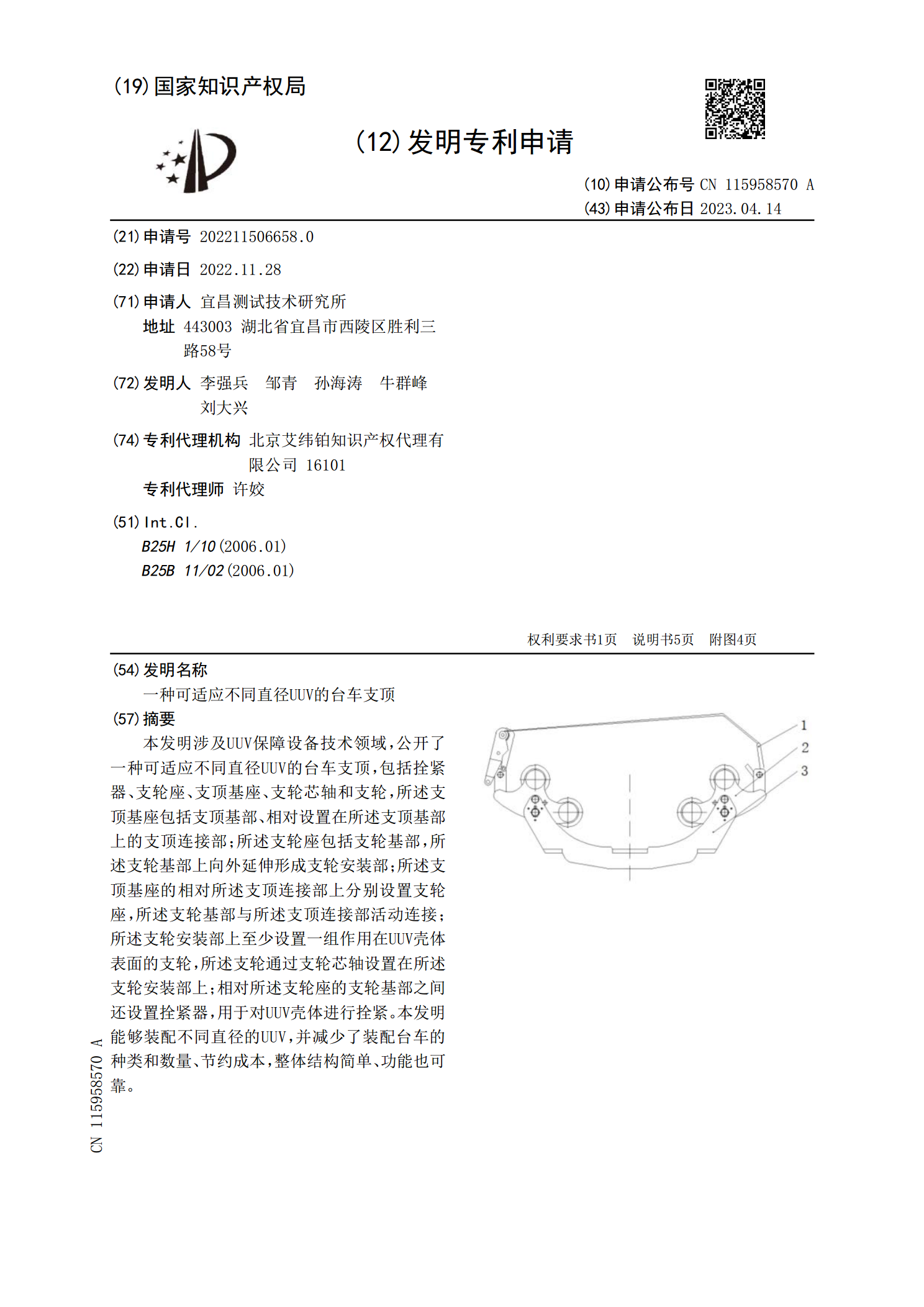
本发明涉及UUV保障设备技术领域,公开了一种可适应不同直径UUV的台车支顶,包括拴紧器、支轮座、支顶基座、支轮芯轴和支轮,所述支顶基座包括支顶基部、相对设置在所述支顶基部上的支顶连接部;所述支轮座包括支轮基部,所述支轮基部上向外延伸形成支轮安装部;所述支顶基座的相对所述支顶连接部上分别设置支轮座,所述支轮基部与所述支顶连接部活动连接;所述支轮安装部上至少设置一组作用在UUV壳体表面的支轮,所述支轮通过支轮芯轴设置在所述支轮安装部上;相对所述支轮座的支轮基部之间还设置拴紧器,用于对UUV壳体进行拴紧。本发明