
一种可翻转自动抓取机械手.pdf

邻家****曼玉

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可翻转自动抓取机械手.pdf
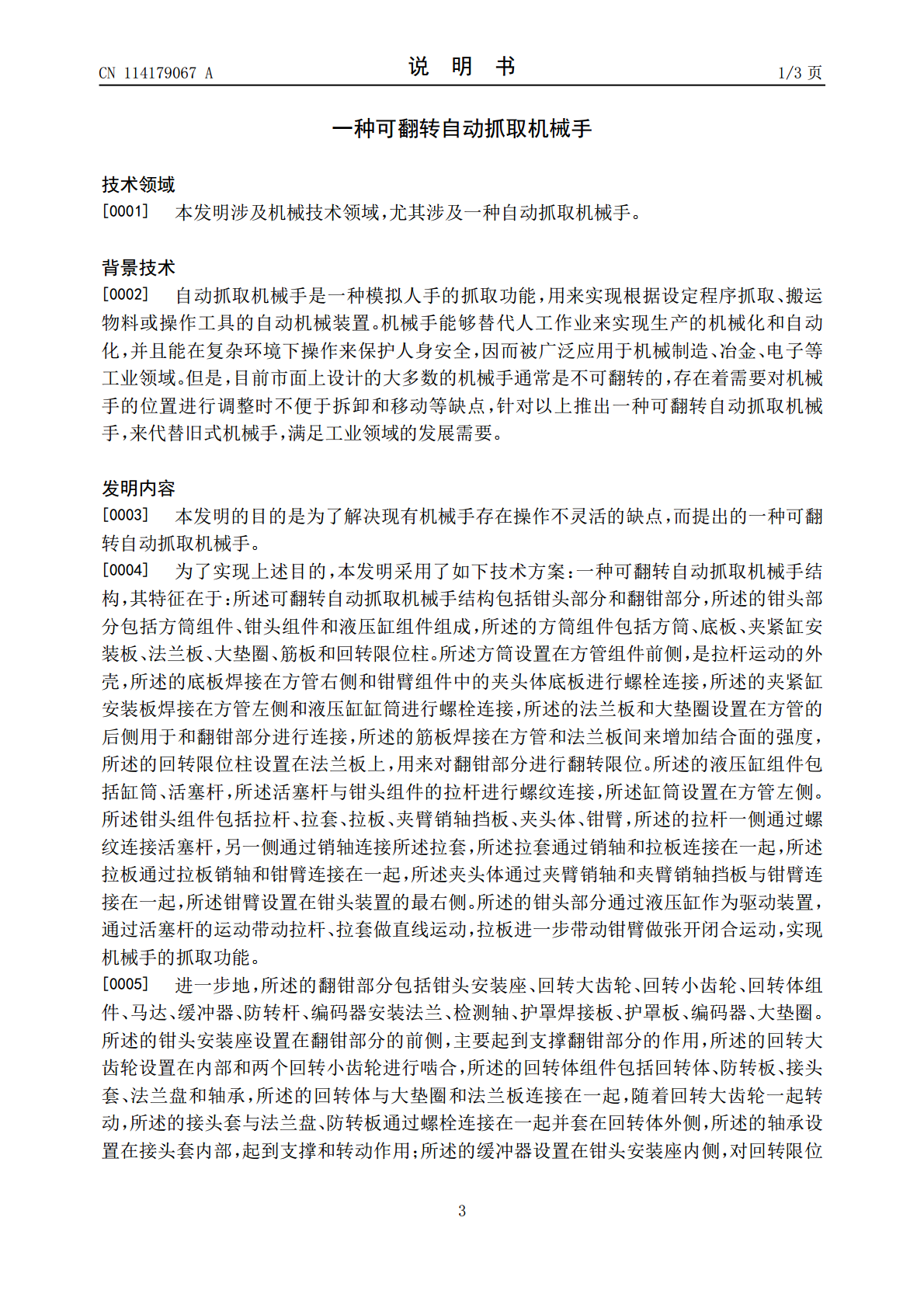
本发明涉及一种可翻转自动抓取机械手。目的是实现自动抓取、搬运物料或操作工具的功能。该机械手主要的结构包括:钳头部分和翻钳部分。钳头部分主要是通过钳臂、拉杆和夹头体组成的,通过液压缸进行驱动;翻钳部分主要是通过钳头回转齿轮、检测轴和编码器组成的,通过电机进行驱动。目前市面上的机械手不能实现可翻转,本发明在普通机械手的基础上设计了自动翻转装置,提高了自动抓取机械手的灵活性和稳定性,具有广阔的市场前景,适合推广。
一种可翻转箱体的抓取机械手.pdf
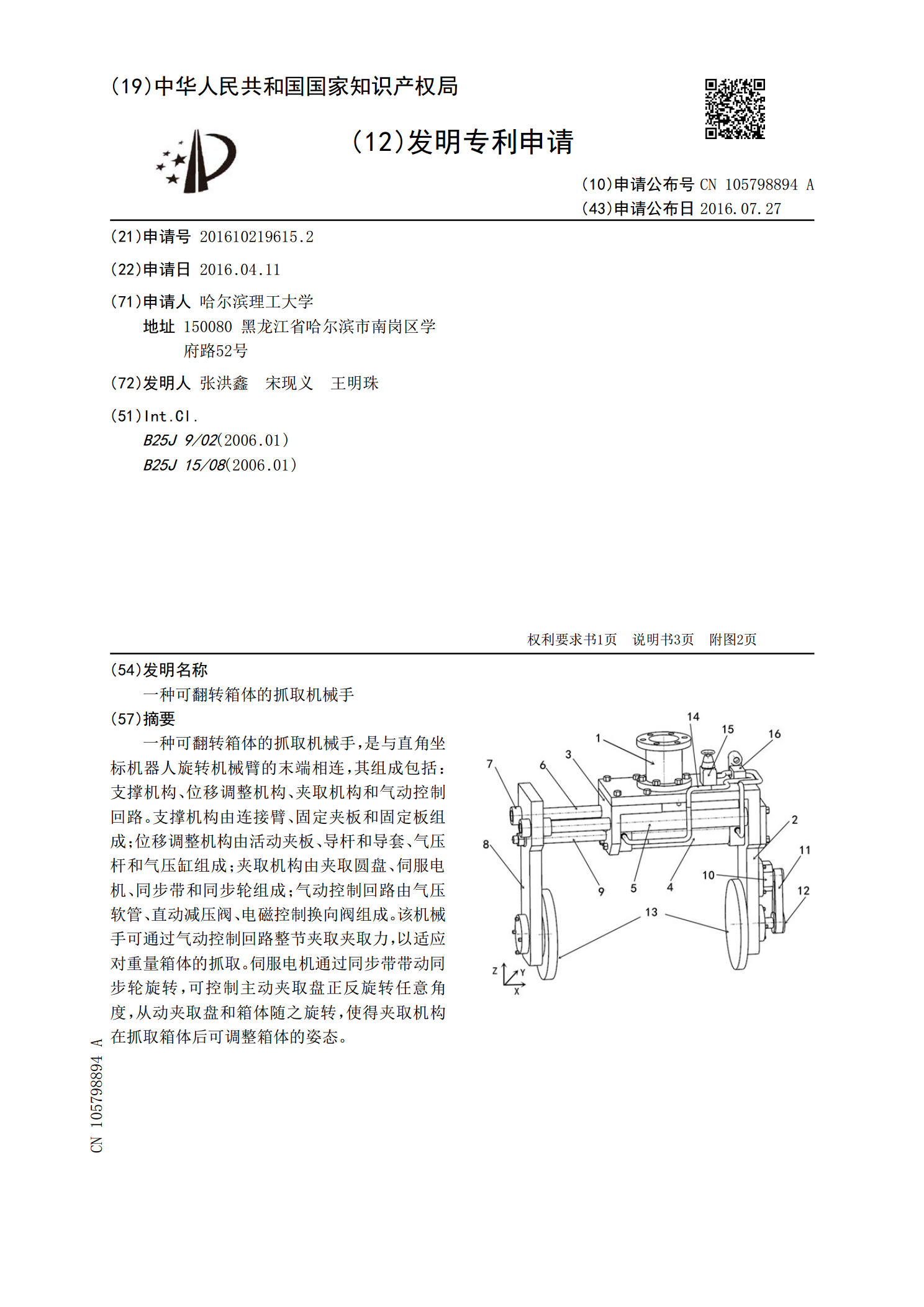
一种可翻转箱体的抓取机械手,是与直角坐标机器人旋转机械臂的末端相连,其组成包括:支撑机构、位移调整机构、夹取机构和气动控制回路。支撑机构由连接臂、固定夹板和固定板组成;位移调整机构由活动夹板、导杆和导套、气压杆和气压缸组成;夹取机构由夹取圆盘、伺服电机、同步带和同步轮组成;气动控制回路由气压软管、直动减压阀、电磁控制换向阀组成。该机械手可通过气动控制回路整节夹取夹取力,以适应对重量箱体的抓取。伺服电机通过同步带带动同步轮旋转,可控制主动夹取盘正反旋转任意角度,从动夹取盘和箱体随之旋转,使得夹取机构在抓取箱
一种自动抓取机械手.pdf
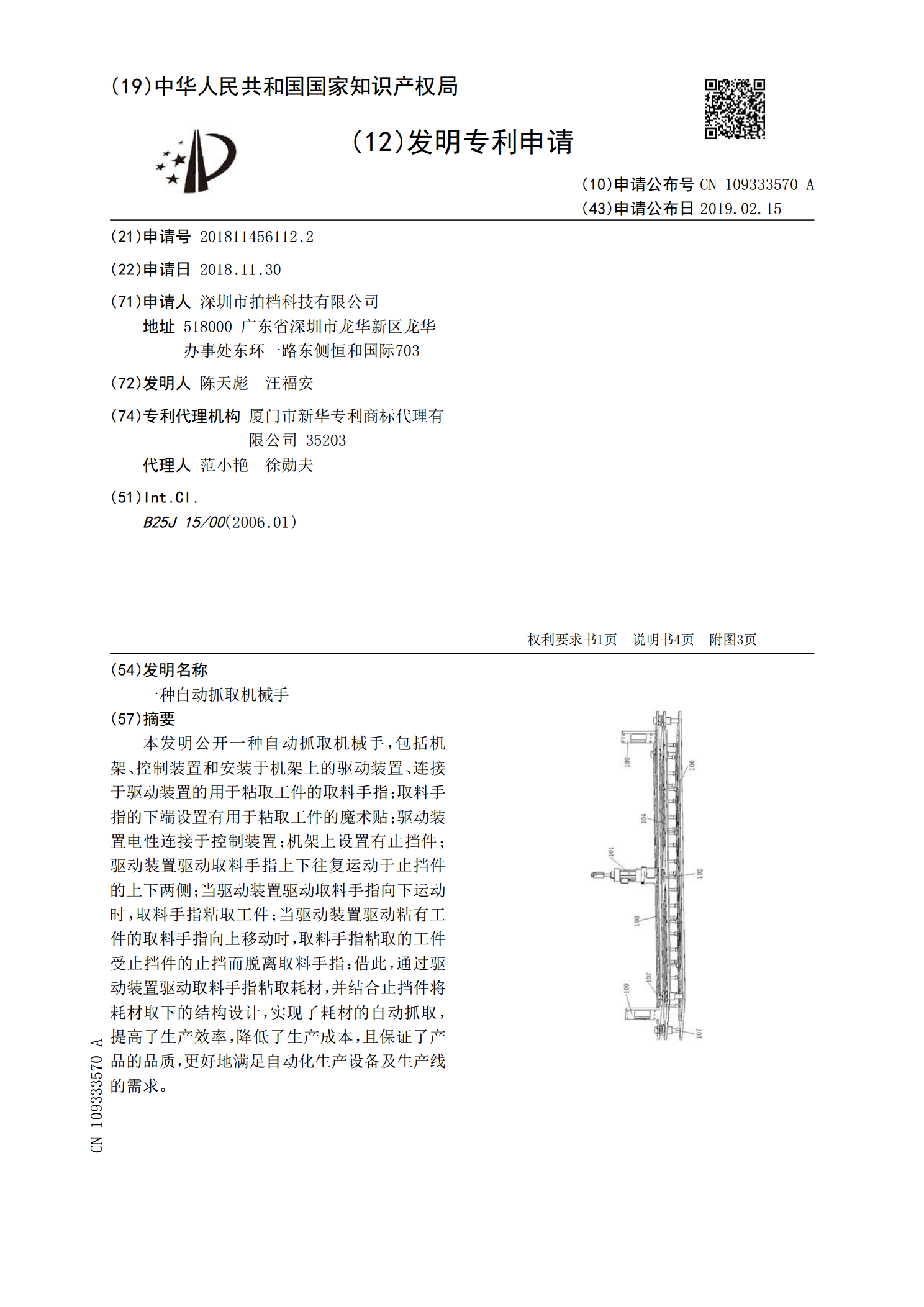
本发明公开一种自动抓取机械手,包括机架、控制装置和安装于机架上的驱动装置、连接于驱动装置的用于粘取工件的取料手指;取料手指的下端设置有用于粘取工件的魔术贴;驱动装置电性连接于控制装置;机架上设置有止挡件;驱动装置驱动取料手指上下往复运动于止挡件的上下两侧;当驱动装置驱动取料手指向下运动时,取料手指粘取工件;当驱动装置驱动粘有工件的取料手指向上移动时,取料手指粘取的工件受止挡件的止挡而脱离取料手指;借此,通过驱动装置驱动取料手指粘取耗材,并结合止挡件将耗材取下的结构设计,实现了耗材的自动抓取,提高了生产效率

一种可适应不同直径电机转子的自动抓取机械手.pdf
本发明公开了一种可适应不同直径电机转子的自动抓取机械手,包括工业机器人、气缸架、平行气缸、第一抓取手指以及第二抓取手指,所述气缸架上安装有至少两个平行气缸,所有平行气缸相对于工业机器人末端的转动中心圆周均匀分布安装;所述第一抓取手指以及第二抓取手指分别固连在平行气缸的两个平动单元上。本发明的可适应不同直径电机转子的自动抓取机械手可适用于不同直径电机转子,在工业机器人带动下壳在不同工位快速抓取、轮换电机转子并在各工位间灵活切换,具有效率高,节约人力成本、结构简单成本相对较低等诸多优点。
一种可翻转机械手.pdf
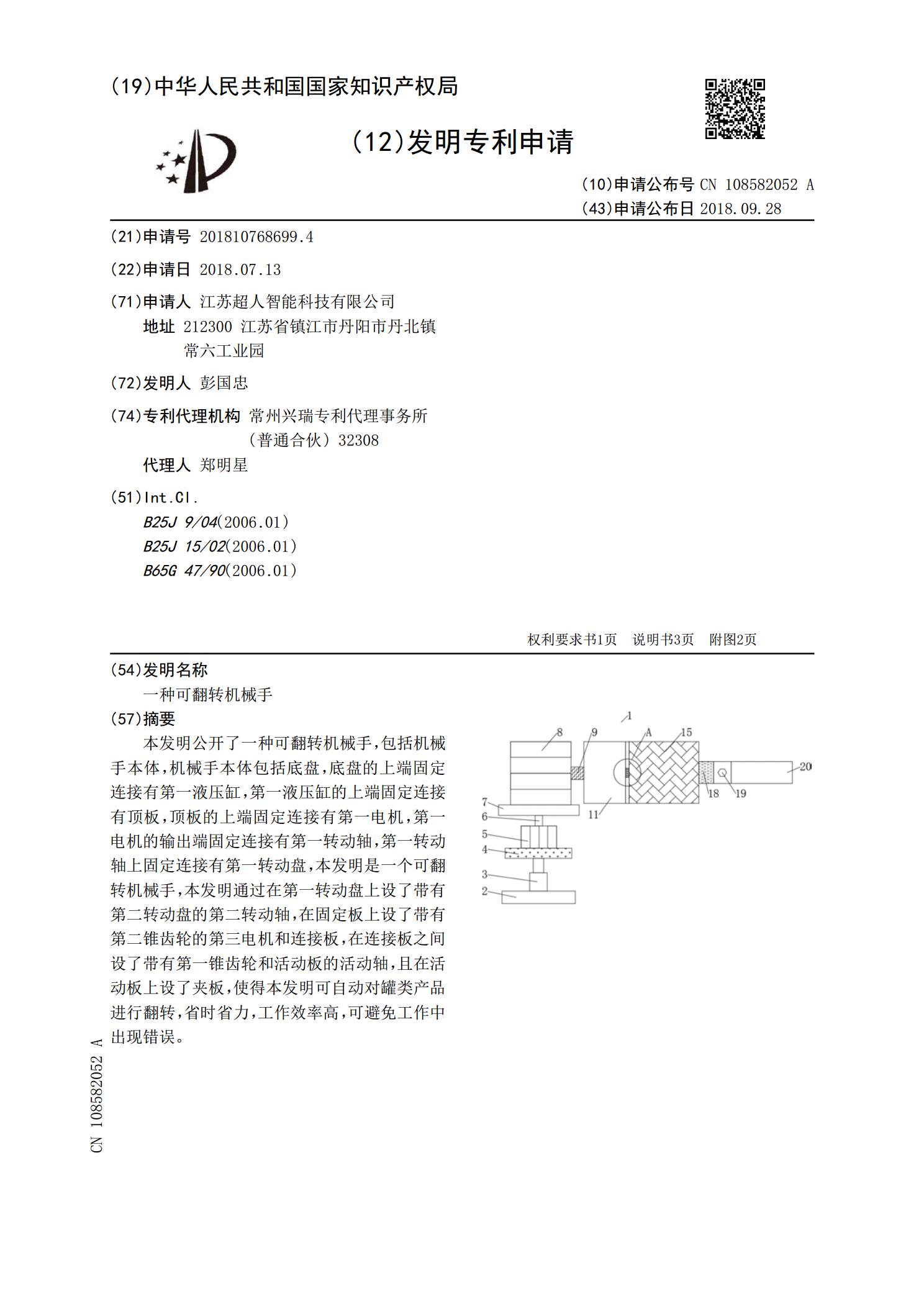
本发明公开了一种可翻转机械手,包括机械手本体,机械手本体包括底盘,底盘的上端固定连接有第一液压缸,第一液压缸的上端固定连接有顶板,顶板的上端固定连接有第一电机,第一电机的输出端固定连接有第一转动轴,第一转动轴上固定连接有第一转动盘,本发明是一个可翻转机械手,本发明通过在第一转动盘上设了带有第二转动盘的第二转动轴,在固定板上设了带有第二锥齿轮的第三电机和连接板,在连接板之间设了带有第一锥齿轮和活动板的活动轴,且在活动板上设了夹板,使得本发明可自动对罐类产品进行翻转,省时省力,工作效率高,可避免工作中出现错误