
一种自动抓取机械手.pdf

邻家****mk

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自动抓取机械手.pdf
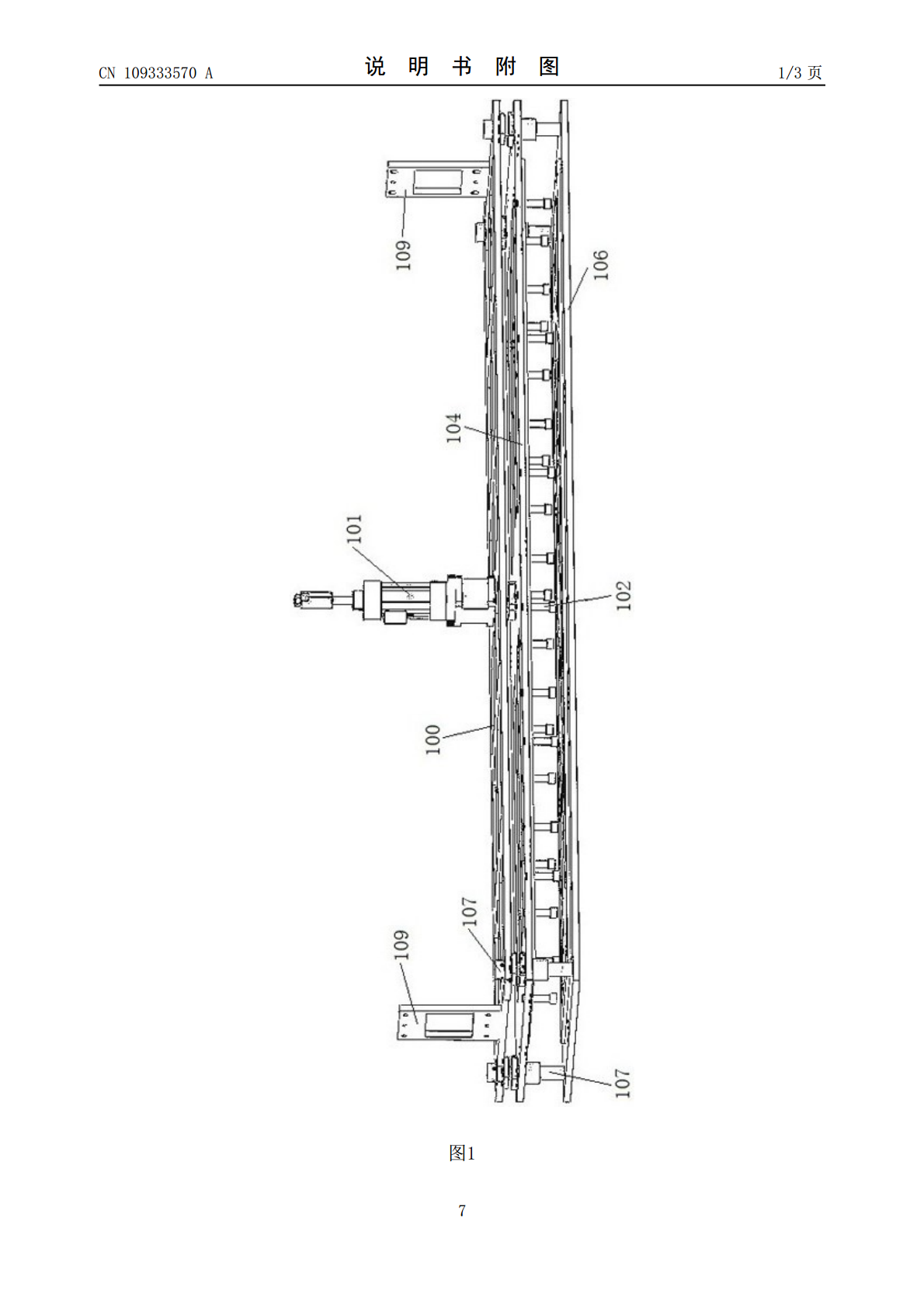
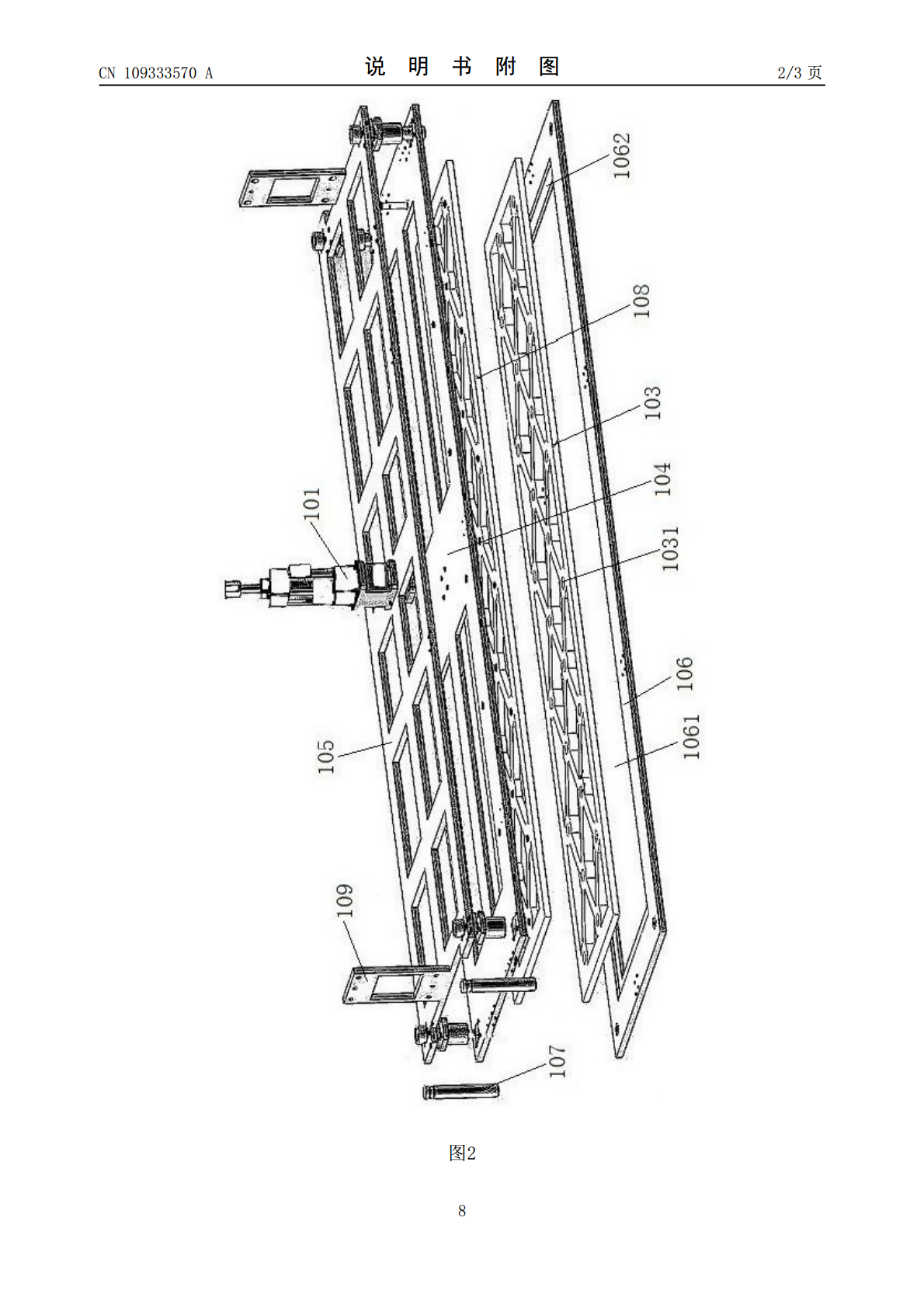
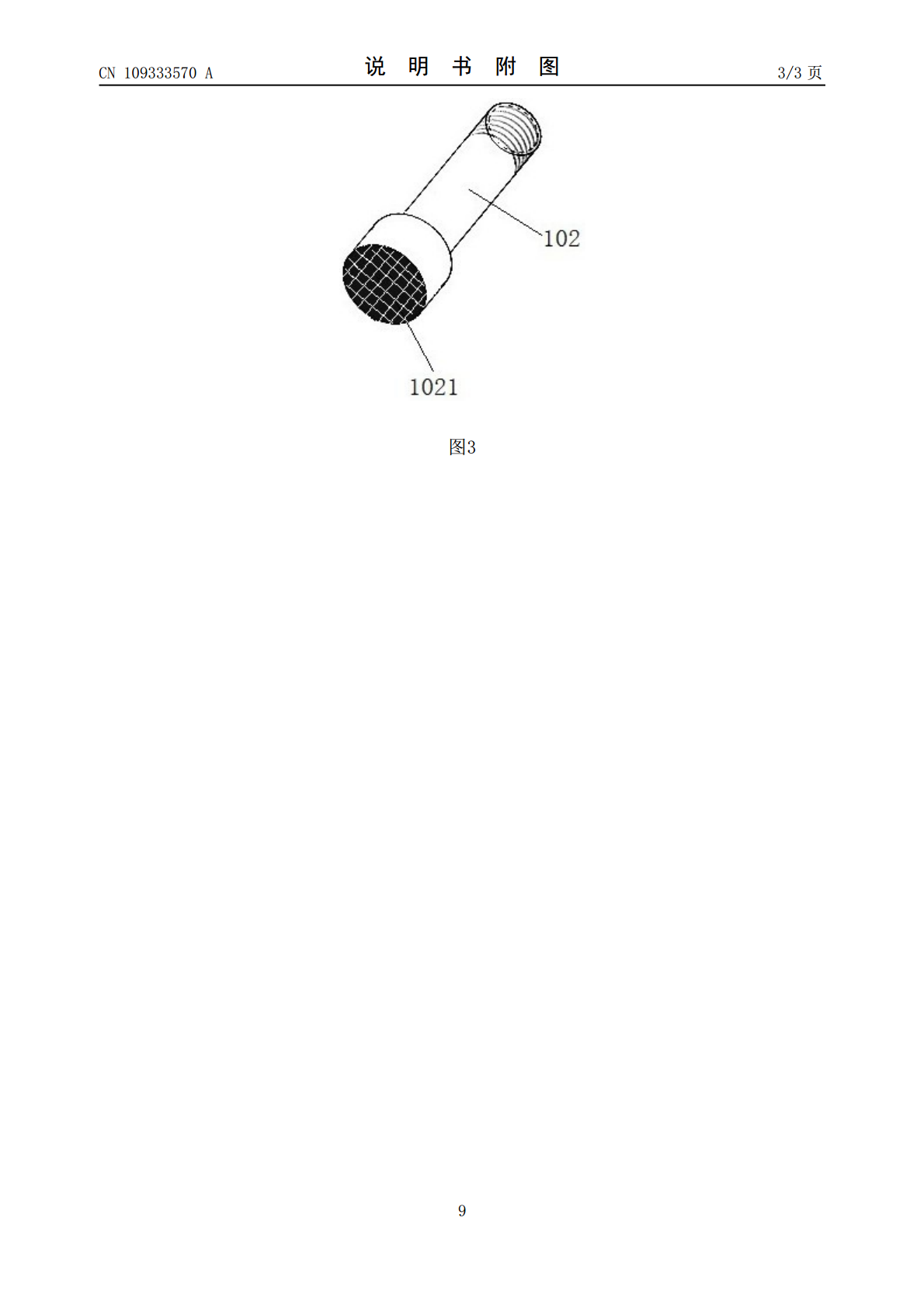
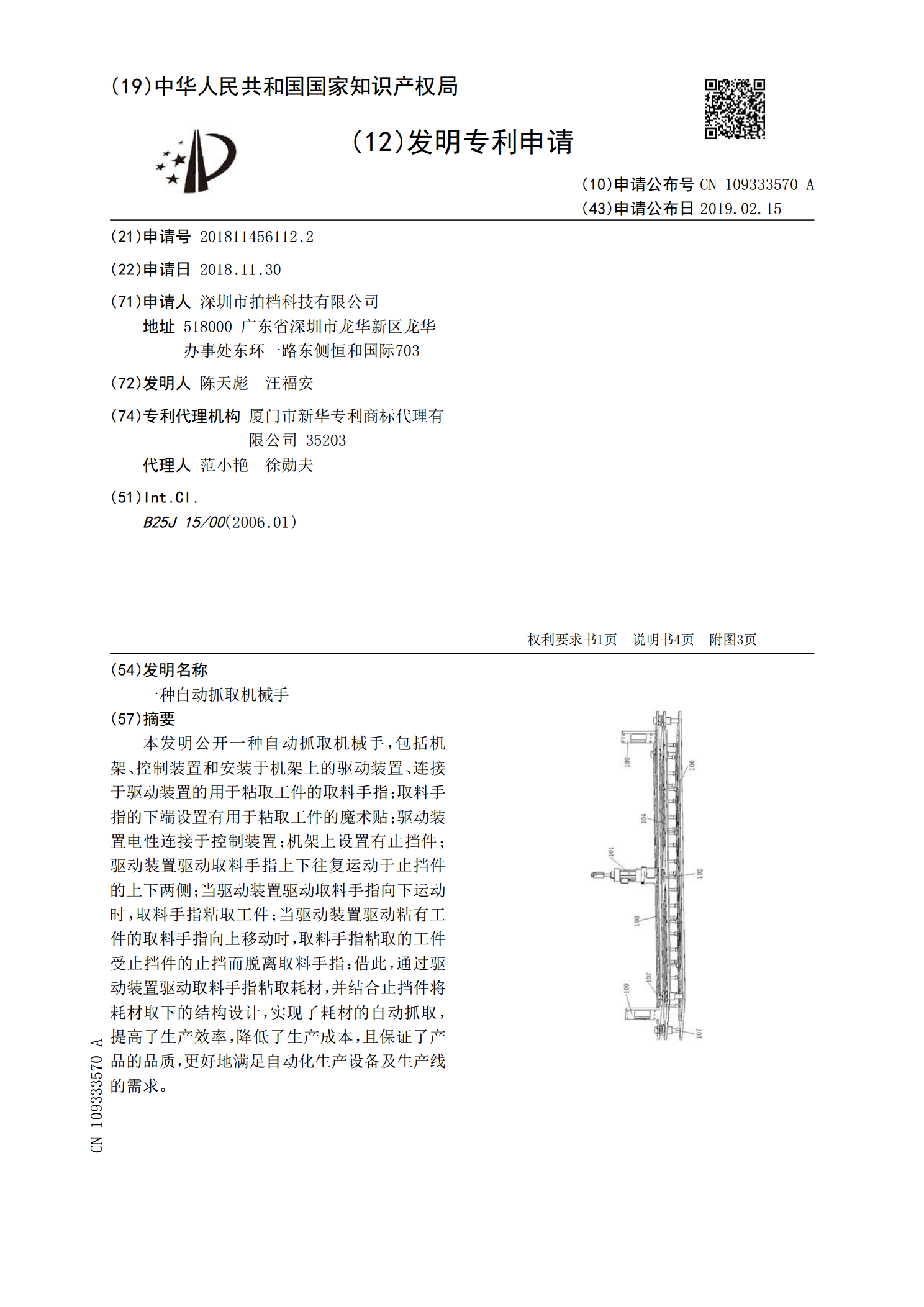
本发明公开一种自动抓取机械手,包括机架、控制装置和安装于机架上的驱动装置、连接于驱动装置的用于粘取工件的取料手指;取料手指的下端设置有用于粘取工件的魔术贴;驱动装置电性连接于控制装置;机架上设置有止挡件;驱动装置驱动取料手指上下往复运动于止挡件的上下两侧;当驱动装置驱动取料手指向下运动时,取料手指粘取工件;当驱动装置驱动粘有工件的取料手指向上移动时,取料手指粘取的工件受止挡件的止挡而脱离取料手指;借此,通过驱动装置驱动取料手指粘取耗材,并结合止挡件将耗材取下的结构设计,实现了耗材的自动抓取,提高了生产效率
一种可翻转自动抓取机械手.pdf
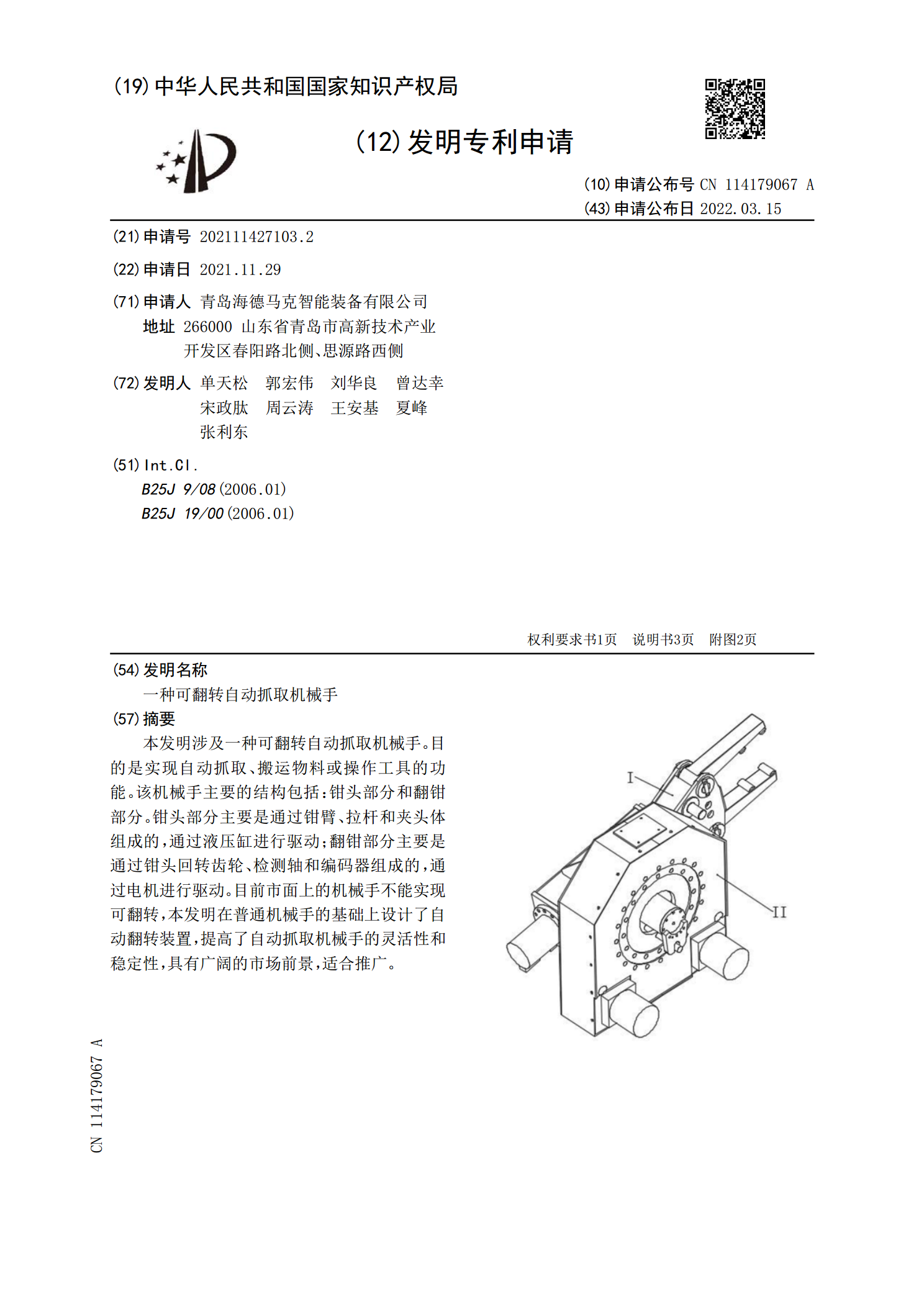
本发明涉及一种可翻转自动抓取机械手。目的是实现自动抓取、搬运物料或操作工具的功能。该机械手主要的结构包括:钳头部分和翻钳部分。钳头部分主要是通过钳臂、拉杆和夹头体组成的,通过液压缸进行驱动;翻钳部分主要是通过钳头回转齿轮、检测轴和编码器组成的,通过电机进行驱动。目前市面上的机械手不能实现可翻转,本发明在普通机械手的基础上设计了自动翻转装置,提高了自动抓取机械手的灵活性和稳定性,具有广阔的市场前景,适合推广。
一种全自动血型仪抓取机械手.pdf
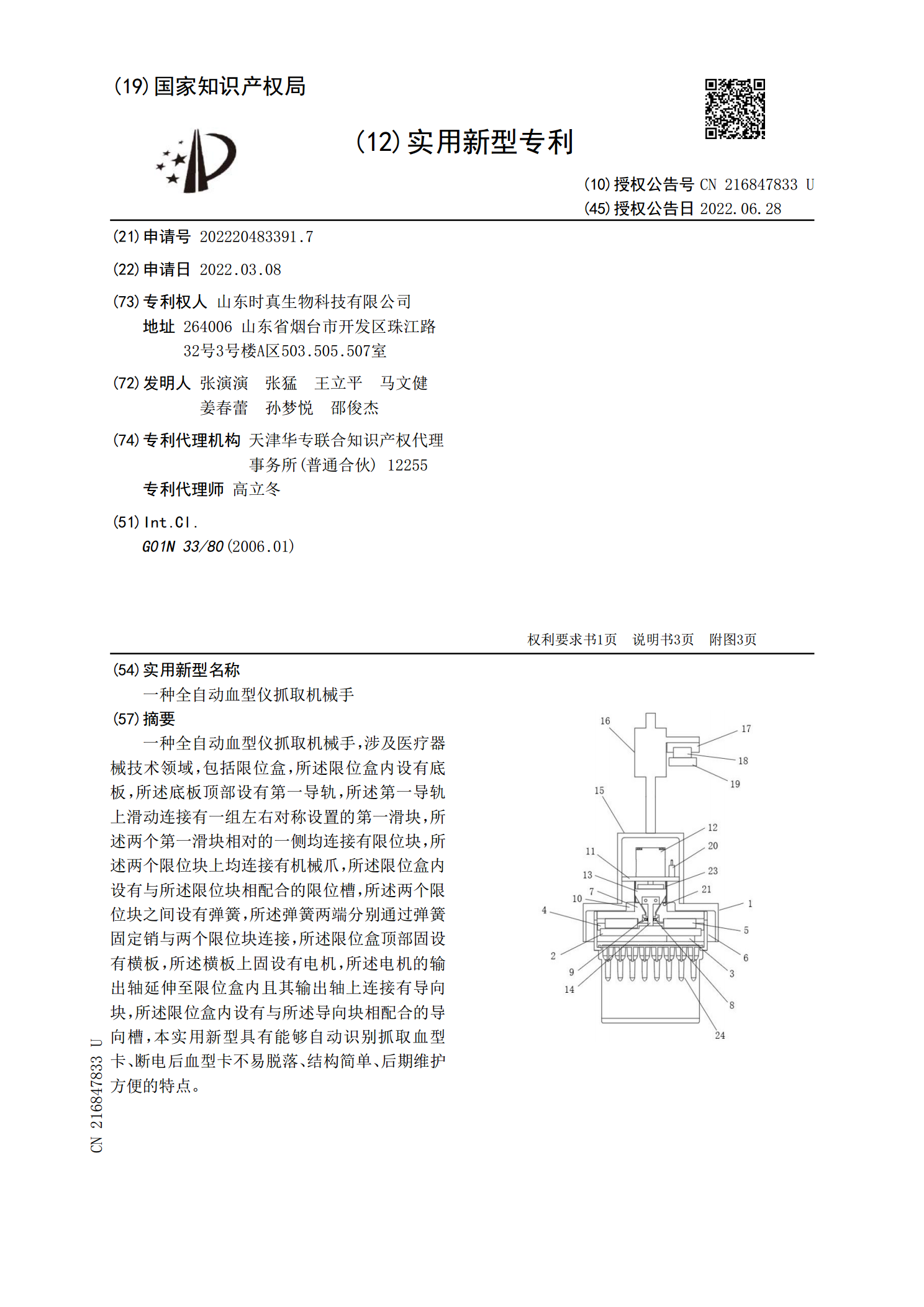
一种全自动血型仪抓取机械手,涉及医疗器械技术领域,包括限位盒,所述限位盒内设有底板,所述底板顶部设有第一导轨,所述第一导轨上滑动连接有一组左右对称设置的第一滑块,所述两个第一滑块相对的一侧均连接有限位块,所述两个限位块上均连接有机械爪,所述限位盒内设有与所述限位块相配合的限位槽,所述两个限位块之间设有弹簧,所述弹簧两端分别通过弹簧固定销与两个限位块连接,所述限位盒顶部固设有横板,所述横板上固设有电机,所述电机的输出轴延伸至限位盒内且其输出轴上连接有导向块,所述限位盒内设有与所述导向块相配合的导向槽,本实用

一种用于自动抓取血型卡的机械手.pdf
本发明公开了一种用于自动抓取血型卡的机械手,其包括一小型电机,所述小型电机固定在一电机连接板上,一齿轮通过圆柱销固定在所述小型电机的输出轴上,所述齿轮咬合有两条齿条,所述的两条齿条对称设置作反向运动,所述电机连接板的两端还分别固连有连接板,所述连接板上开设有齿条过孔,所述的两条齿条分别穿过所述齿条过孔,并所述的两条齿条的相背端分别固连有一夹条,所述夹条的底端固设有用于抓取血型卡的夹块。该机械手采用小型电机实现机械手动作,体积小,使用方便,安全可靠。
一种自动抓取反应杯的机械手装置.pdf
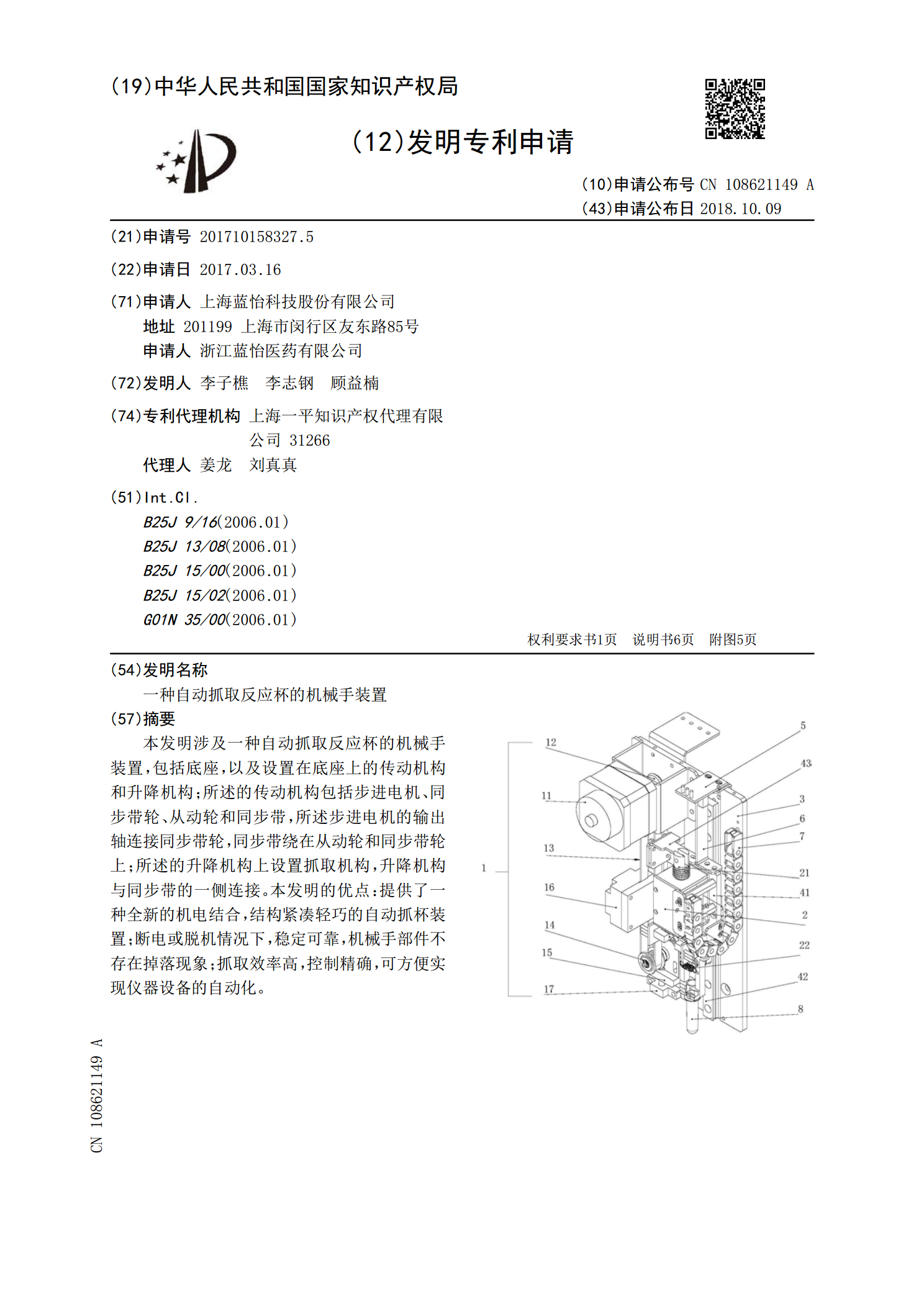
本发明涉及一种自动抓取反应杯的机械手装置,包括底座,以及设置在底座上的传动机构和升降机构;所述的传动机构包括步进电机、同步带轮、从动轮和同步带,所述步进电机的输出轴连接同步带轮,同步带绕在从动轮和同步带轮上;所述的升降机构上设置抓取机构,升降机构与同步带的一侧连接。本发明的优点:提供了一种全新的机电结合,结构紧凑轻巧的自动抓杯装置;断电或脱机情况下,稳定可靠,机械手部件不存在掉落现象;抓取效率高,控制精确,可方便实现仪器设备的自动化。