
基于肘内传动的摇臂悬架式速差转向无人机动平台.pdf

一吃****继勇


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于肘内传动的摇臂悬架式速差转向无人机动平台.pdf
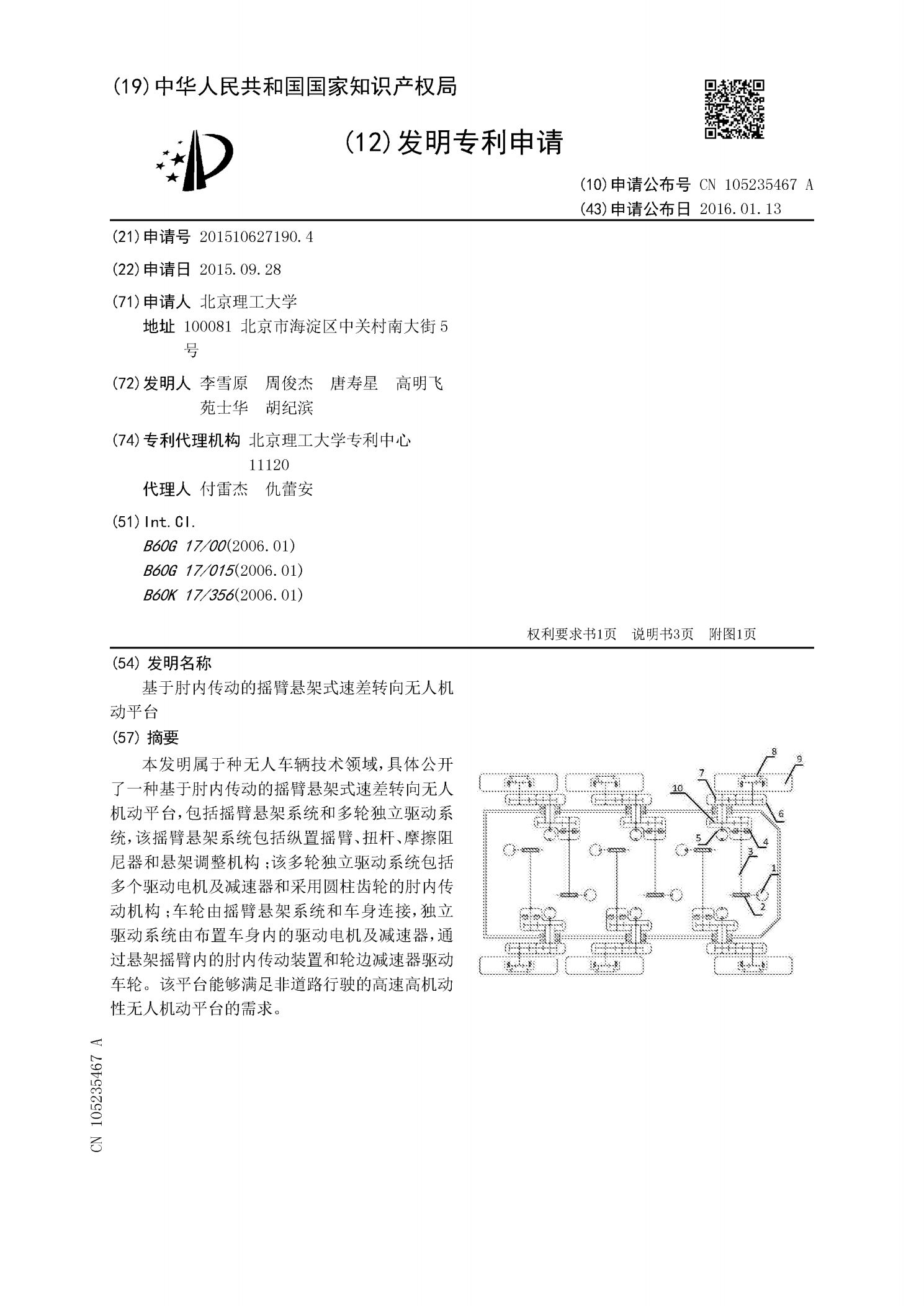
本发明属于种无人车辆技术领域,具体公开了一种基于肘内传动的摇臂悬架式速差转向无人机动平台,包括摇臂悬架系统和多轮独立驱动系统,该摇臂悬架系统包括纵置摇臂、扭杆、摩擦阻尼器和悬架调整机构;该多轮独立驱动系统包括多个驱动电机及减速器和采用圆柱齿轮的肘内传动机构;车轮由摇臂悬架系统和车身连接,独立驱动系统由布置车身内的驱动电机及减速器,通过悬架摇臂内的肘内传动装置和轮边减速器驱动车轮。该平台能够满足非道路行驶的高速高机动性无人机动平台的需求。
高速无人机动平台摇臂悬架系统.pdf
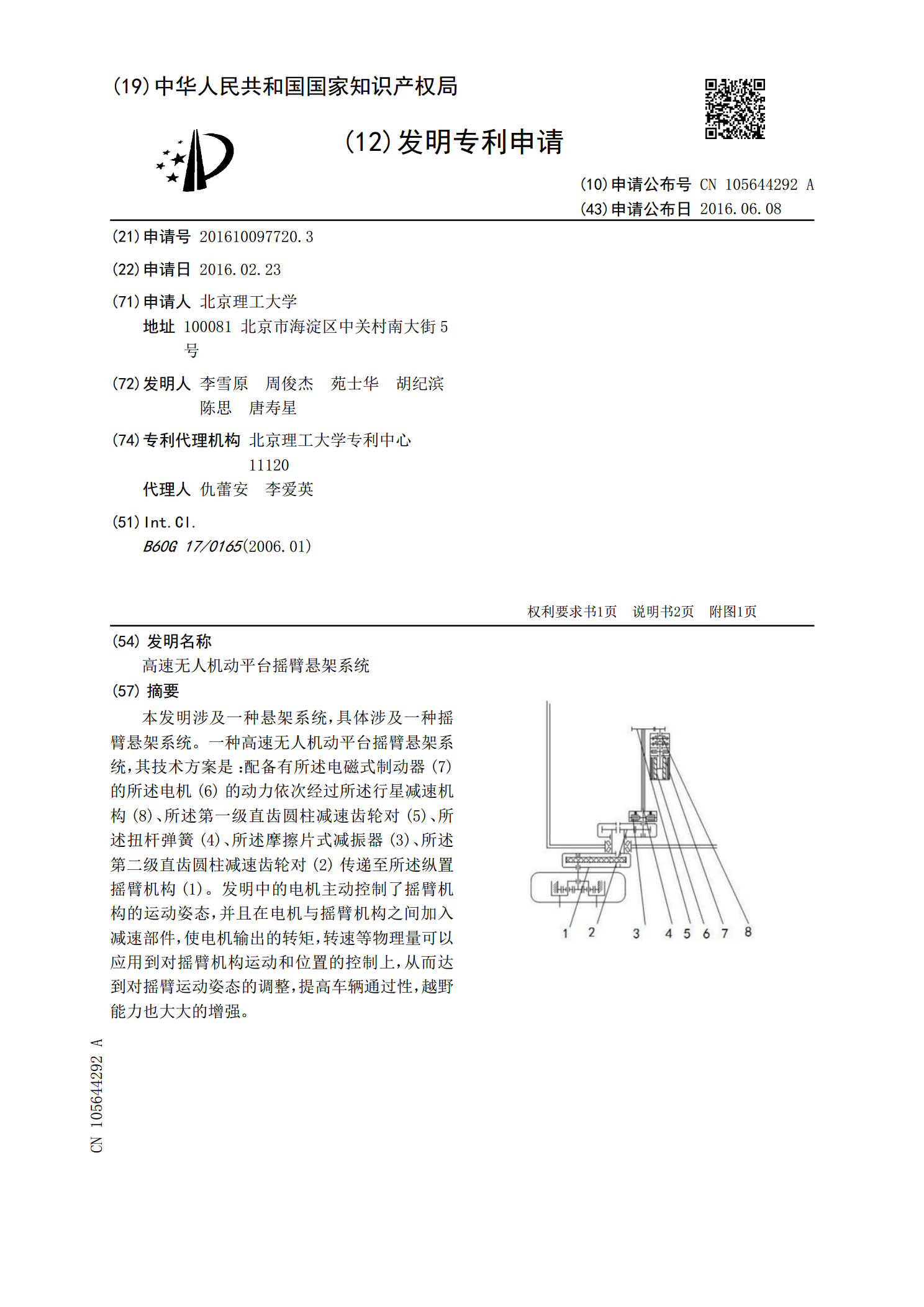
本发明涉及一种悬架系统,具体涉及一种摇臂悬架系统。一种高速无人机动平台摇臂悬架系统,其技术方案是:配备有所述电磁式制动器(7)的所述电机(6)的动力依次经过所述行星减速机构(8)、所述第一级直齿圆柱减速齿轮对(5)、所述扭杆弹簧(4)、所述摩擦片式减振器(3)、所述第二级直齿圆柱减速齿轮对(2)传递至所述纵置摇臂机构(1)。发明中的电机主动控制了摇臂机构的运动姿态,并且在电机与摇臂机构之间加入减速部件,使电机输出的转矩,转速等物理量可以应用到对摇臂机构运动和位置的控制上,从而达到对摇臂运动姿态的调整,提高
一种速差转向无人机动车.pdf
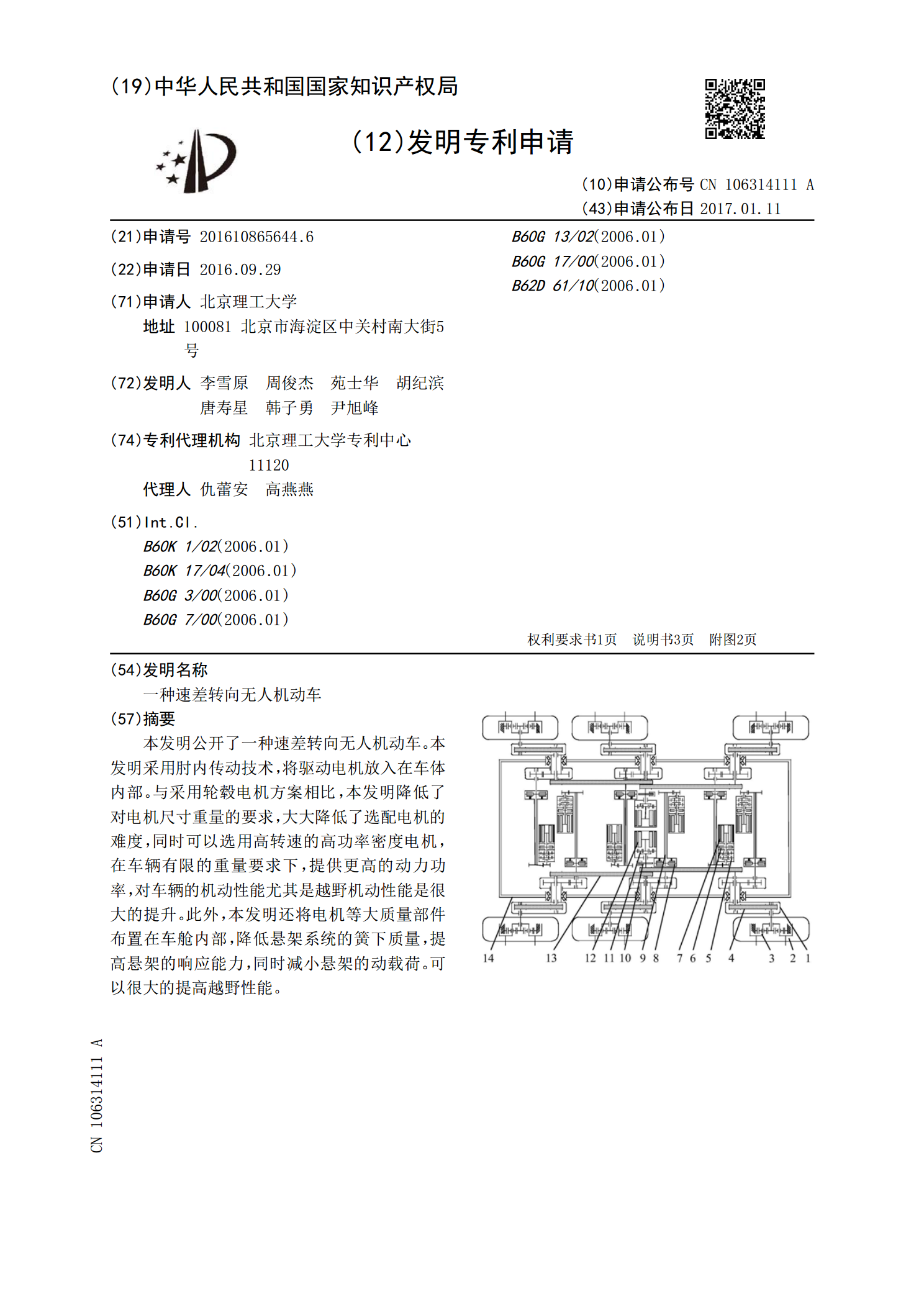
本发明公开了一种速差转向无人机动车。本发明采用肘内传动技术,将驱动电机放入在车体内部。与采用轮毂电机方案相比,本发明降低了对电机尺寸重量的要求,大大降低了选配电机的难度,同时可以选用高转速的高功率密度电机,在车辆有限的重量要求下,提供更高的动力功率,对车辆的机动性能尤其是越野机动性能是很大的提升。此外,本发明还将电机等大质量部件布置在车舱内部,降低悬架系统的簧下质量,提高悬架的响应能力,同时减小悬架的动载荷。可以很大的提高越野性能。
主动差速转向装置.pdf
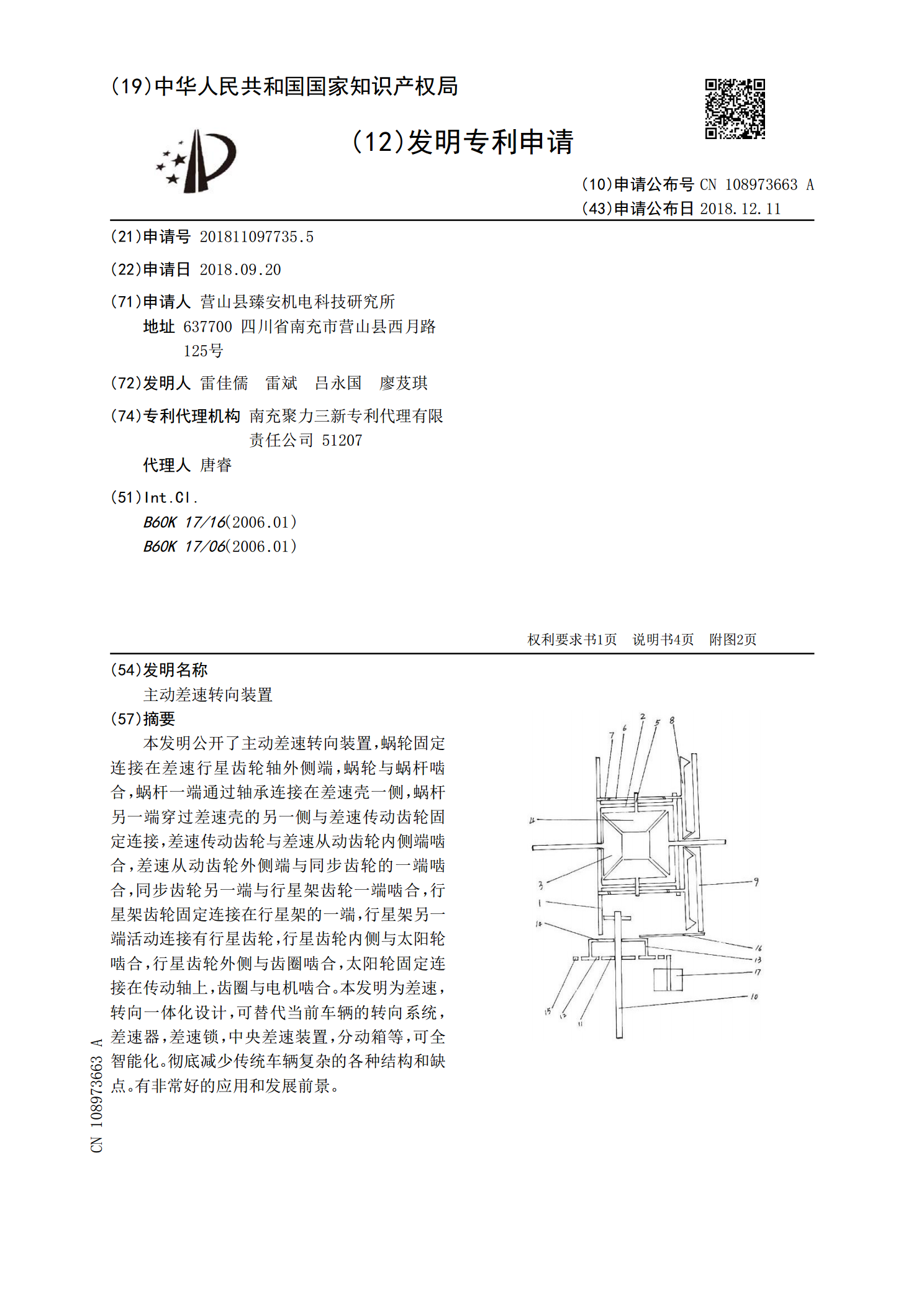
本发明公开了主动差速转向装置,蜗轮固定连接在差速行星齿轮轴外侧端,蜗轮与蜗杆啮合,蜗杆一端通过轴承连接在差速壳一侧,蜗杆另一端穿过差速壳的另一侧与差速传动齿轮固定连接,差速传动齿轮与差速从动齿轮内侧端啮合,差速从动齿轮外侧端与同步齿轮的一端啮合,同步齿轮另一端与行星架齿轮一端啮合,行星架齿轮固定连接在行星架的一端,行星架另一端活动连接有行星齿轮,行星齿轮内侧与太阳轮啮合,行星齿轮外侧与齿圈啮合,太阳轮固定连接在传动轴上,齿圈与电机啮合。本发明为差速,转向一体化设计,可替代当前车辆的转向系统,差速器,差速锁
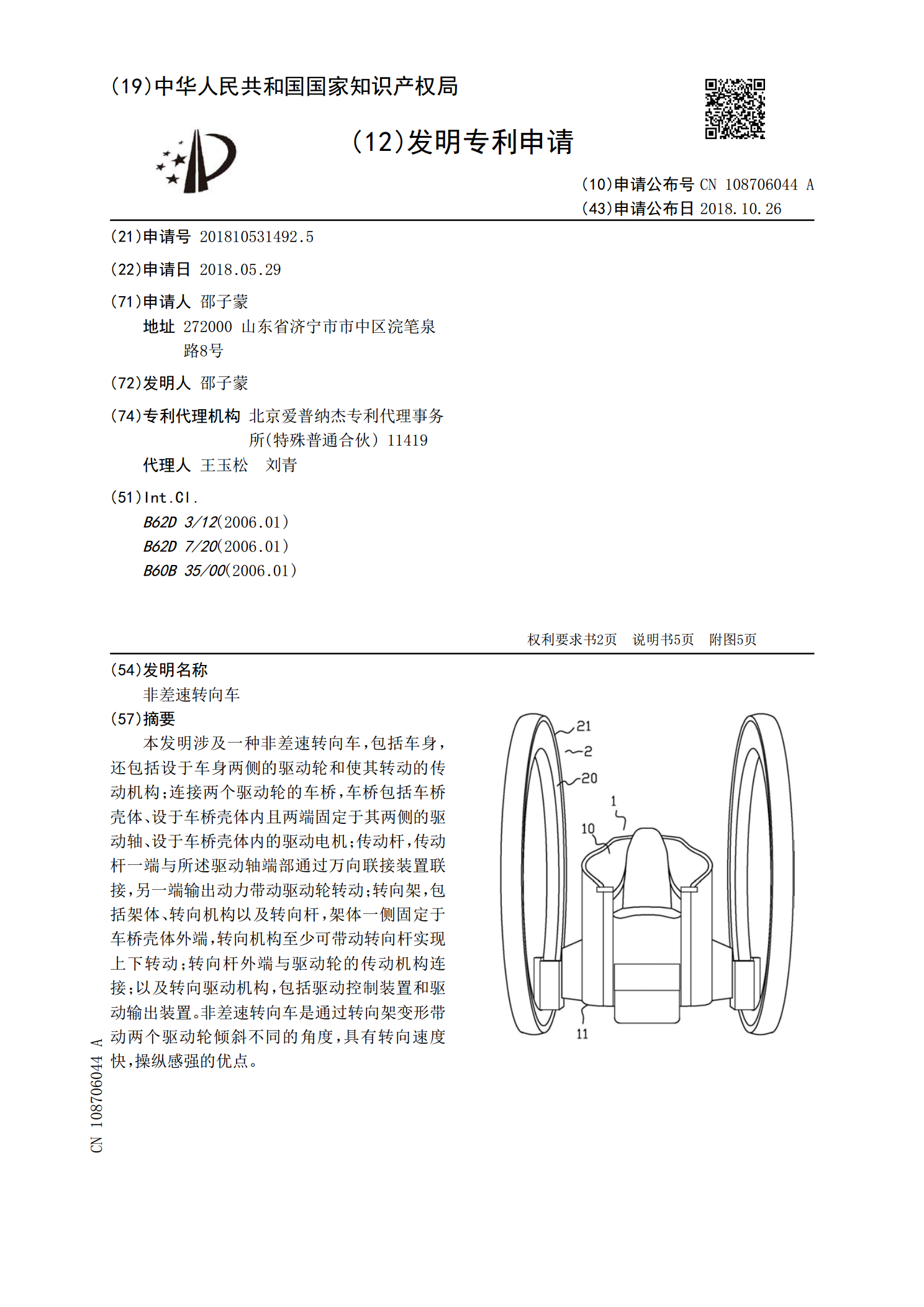
非差速转向车.pdf
本发明涉及一种非差速转向车,包括车身,还包括设于车身两侧的驱动轮和使其转动的传动机构;连接两个驱动轮的车桥,车桥包括车桥壳体、设于车桥壳体内且两端固定于其两侧的驱动轴、设于车桥壳体内的驱动电机;传动杆,传动杆一端与所述驱动轴端部通过万向联接装置联接,另一端输出动力带动驱动轮转动;转向架,包括架体、转向机构以及转向杆,架体一侧固定于车桥壳体外端,转向机构至少可带动转向杆实现上下转动;转向杆外端与驱动轮的传动机构连接;以及转向驱动机构,包括驱动控制装置和驱动输出装置。非差速转向车是通过转向架变形带动两个驱动轮