
一种速差转向无人机动车.pdf

一只****生物

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种速差转向无人机动车.pdf
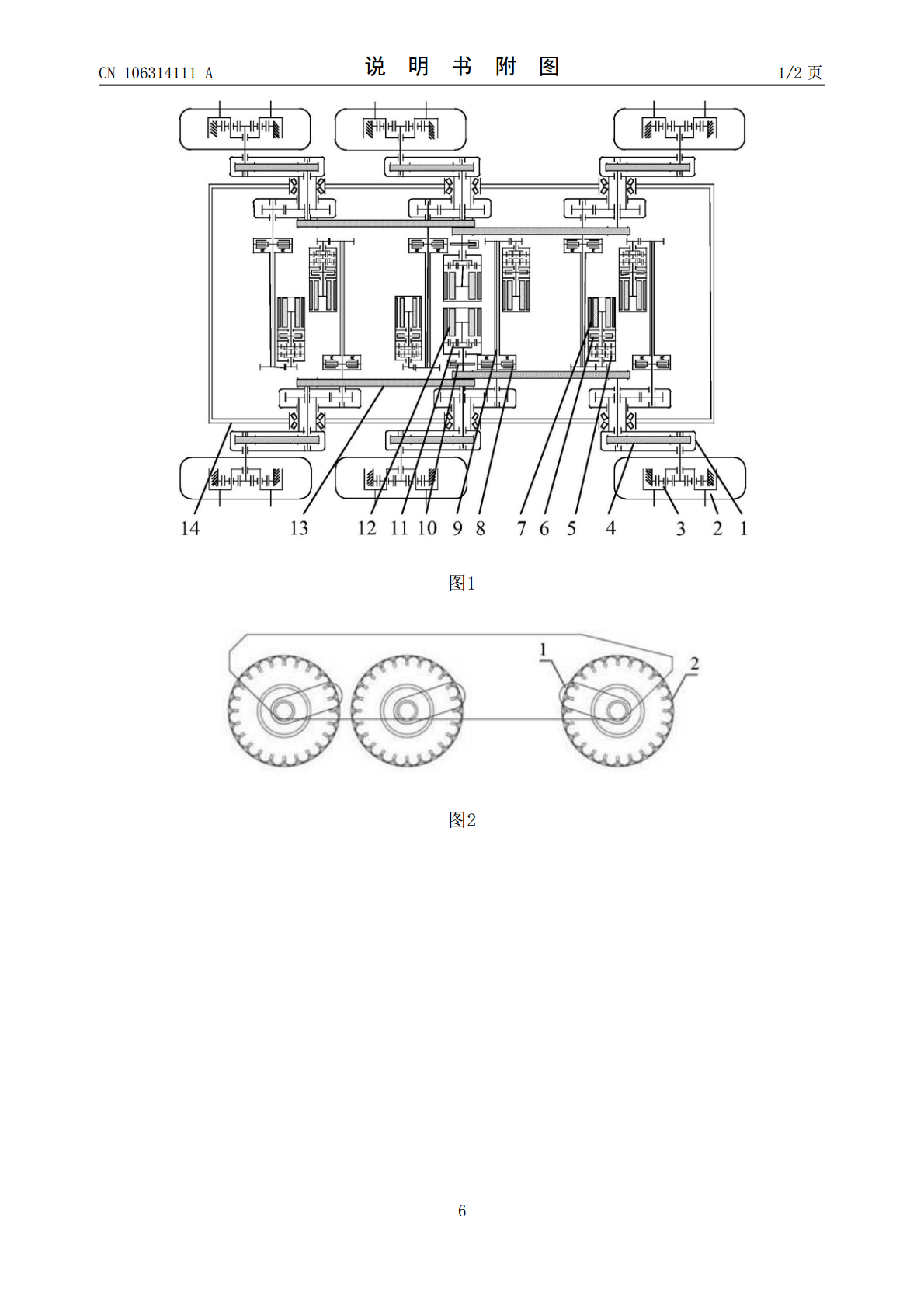
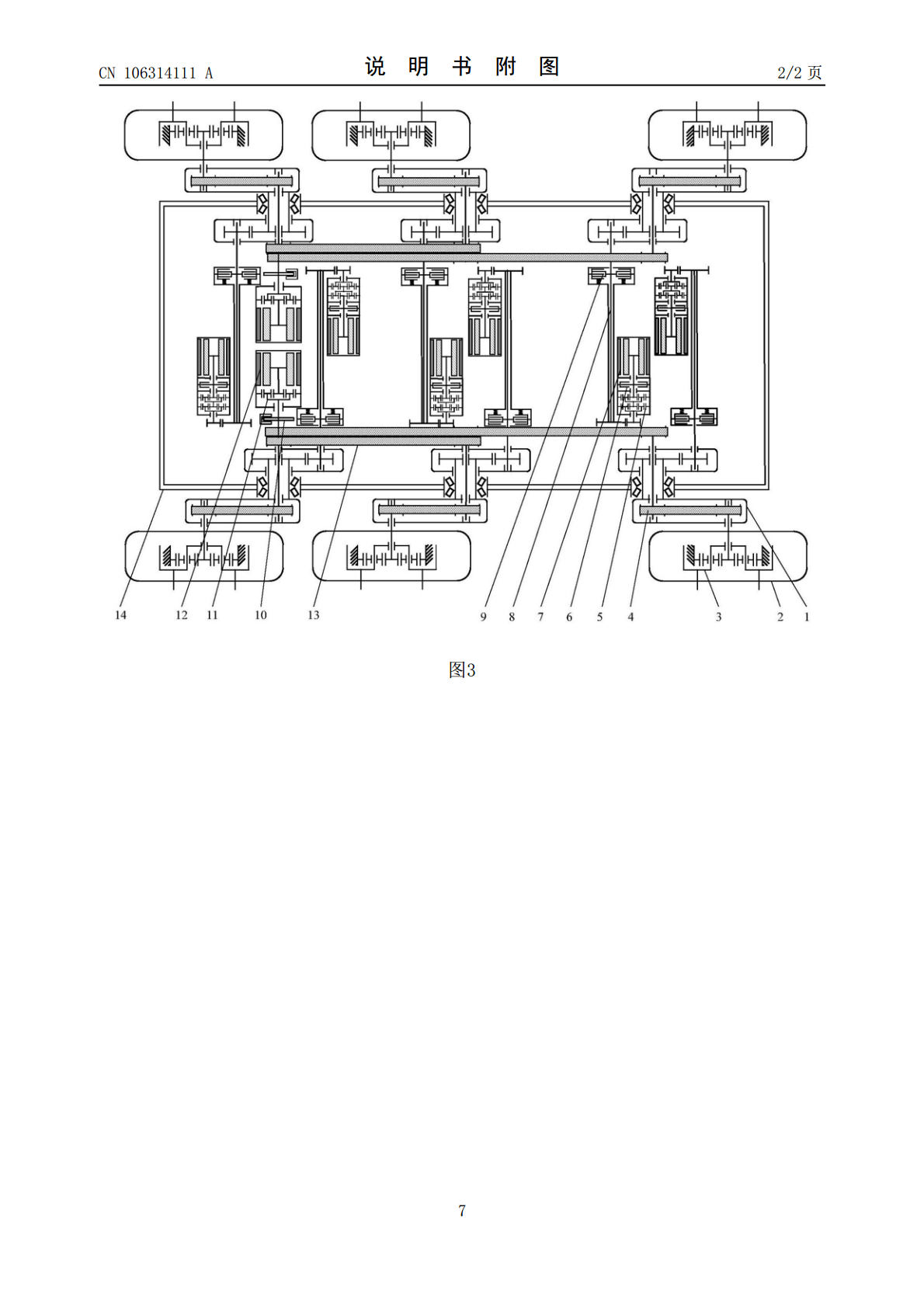
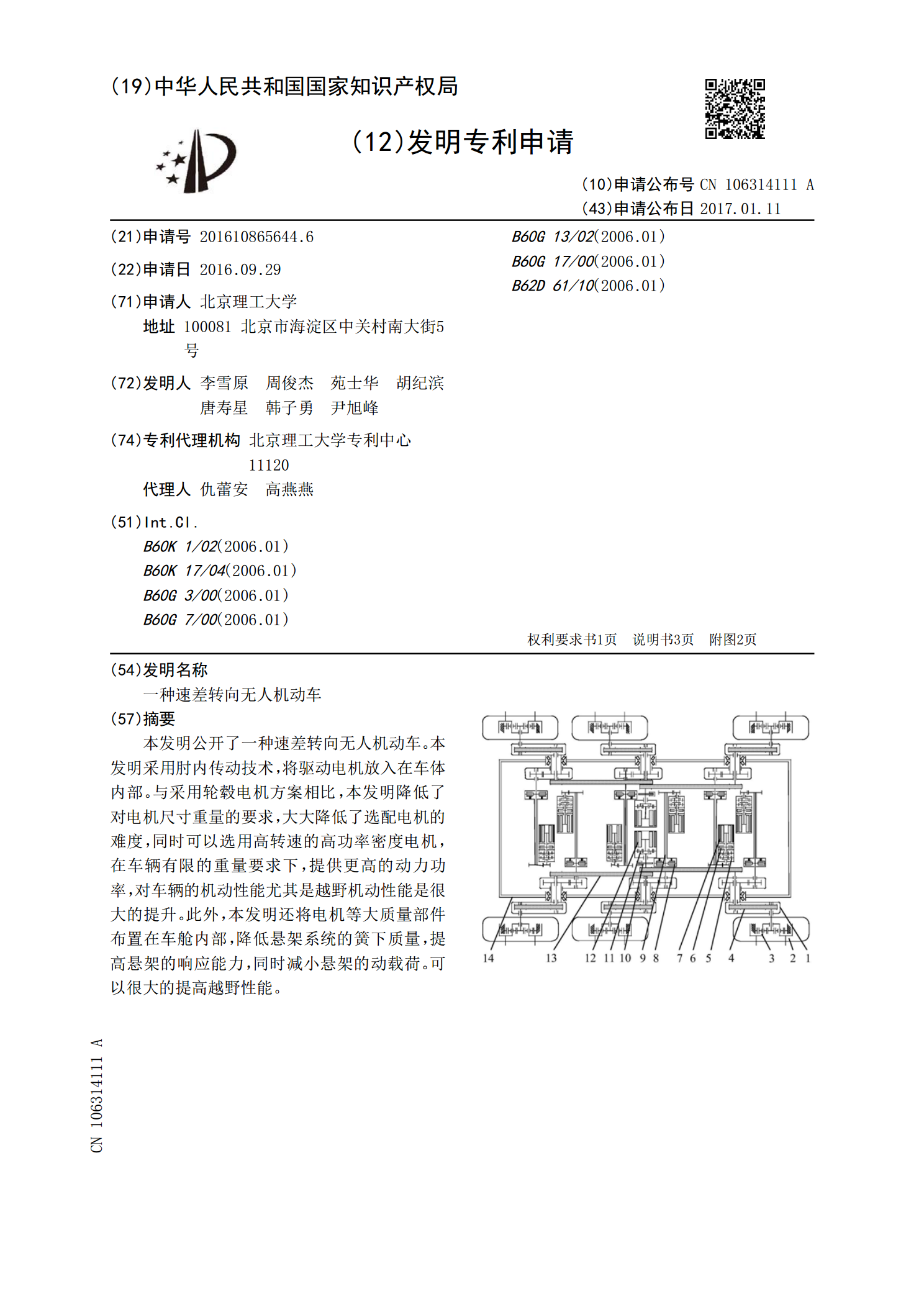
本发明公开了一种速差转向无人机动车。本发明采用肘内传动技术,将驱动电机放入在车体内部。与采用轮毂电机方案相比,本发明降低了对电机尺寸重量的要求,大大降低了选配电机的难度,同时可以选用高转速的高功率密度电机,在车辆有限的重量要求下,提供更高的动力功率,对车辆的机动性能尤其是越野机动性能是很大的提升。此外,本发明还将电机等大质量部件布置在车舱内部,降低悬架系统的簧下质量,提高悬架的响应能力,同时减小悬架的动载荷。可以很大的提高越野性能。
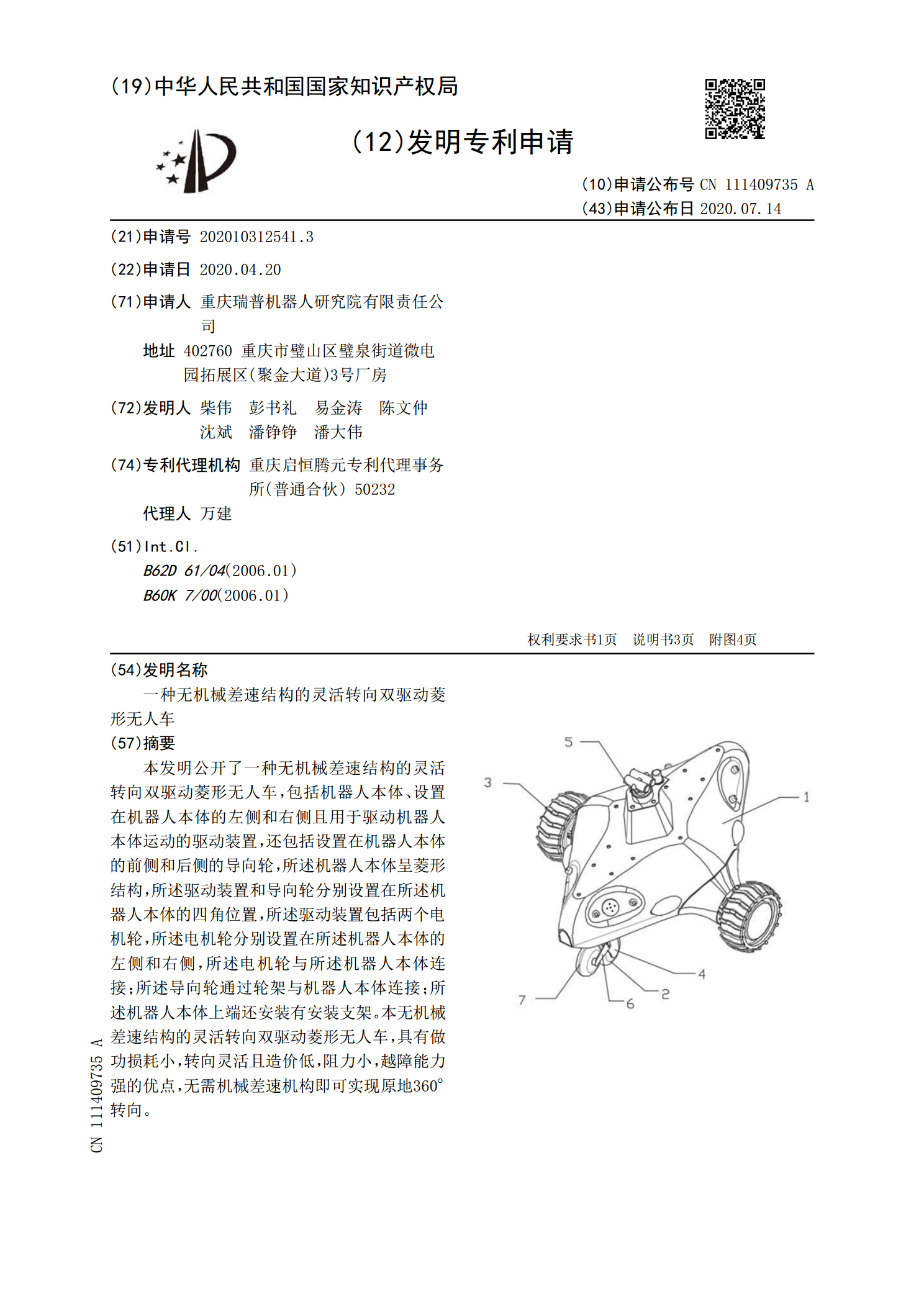
一种无机械差速结构的灵活转向双驱动菱形无人车.pdf
本发明公开了一种无机械差速结构的灵活转向双驱动菱形无人车,包括机器人本体、设置在机器人本体的左侧和右侧且用于驱动机器人本体运动的驱动装置,还包括设置在机器人本体的前侧和后侧的导向轮,所述机器人本体呈菱形结构,所述驱动装置和导向轮分别设置在所述机器人本体的四角位置,所述驱动装置包括两个电机轮,所述电机轮分别设置在所述机器人本体的左侧和右侧,所述电机轮与所述机器人本体连接;所述导向轮通过轮架与机器人本体连接;所述机器人本体上端还安装有安装支架。本无机械差速结构的灵活转向双驱动菱形无人车,具有做功损耗小,转向灵

一种车辆转向的差速装置.pdf
本发明涉及一种车辆转向的差速装置,具体地说是供车辆行进间转向时平衡两侧车轮的差速装置,该转向和差速装置于动力模块的轮圈马达内部容置空间,两侧具有中心孔、且穿设有中心轴、由两侧中心孔向外延伸,而容置空间内装设驱动单元可带动主动齿轮、轮圈马达转动,并于中心轴一端组装传动齿轮组、连接预设车辆的一侧车轮,另一端为组装浮动减速机构、利用减速齿轮搭配主动齿轮运转,则减速齿轮装设于旋转盘座,且旋转盘座组装在中心轴上、并穿过中心孔的外侧,再连设有动力传输单元,通过动力传输单元连接预设车辆另一侧的车轮,供预设车辆行进间转向
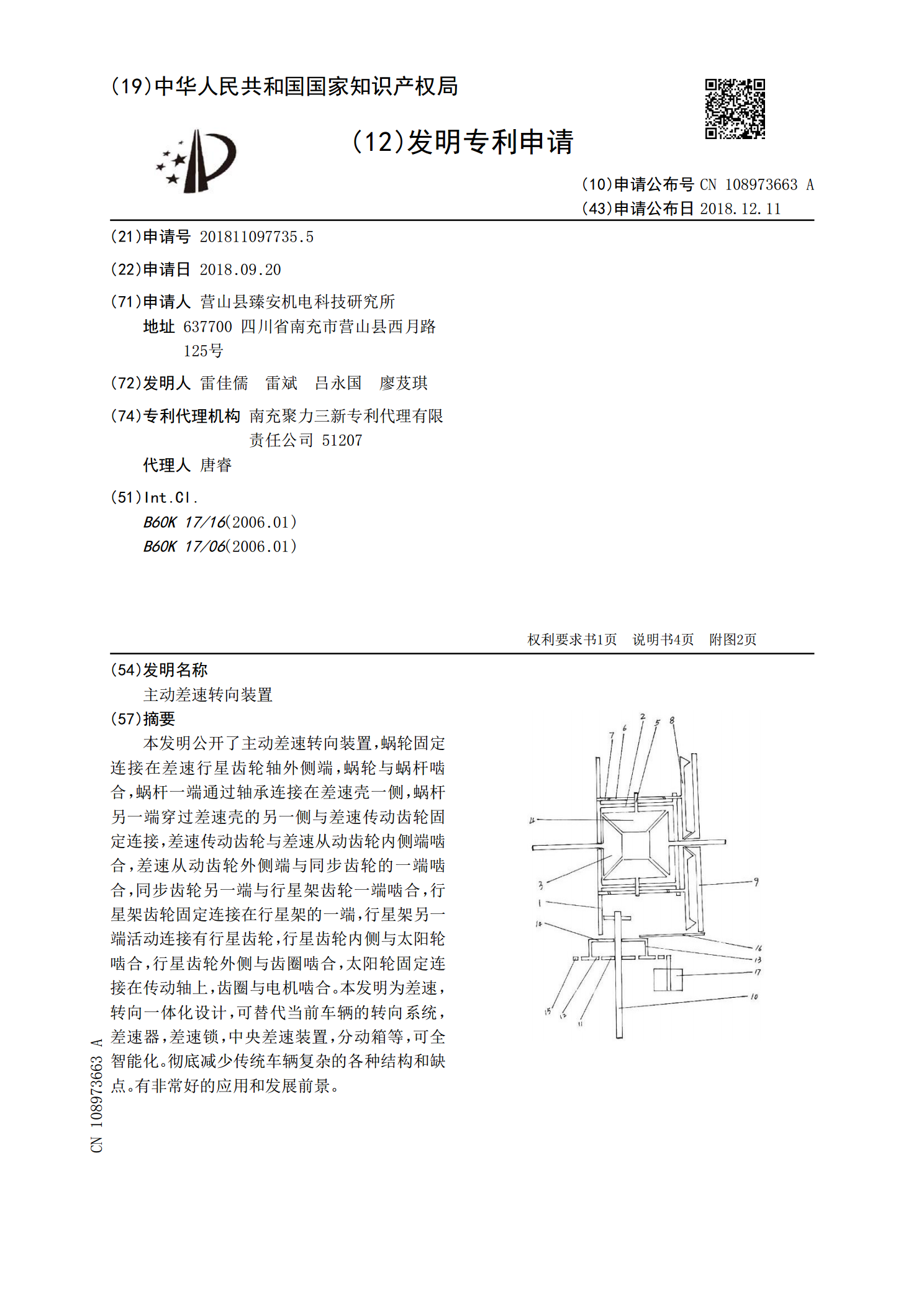
主动差速转向装置.pdf
本发明公开了主动差速转向装置,蜗轮固定连接在差速行星齿轮轴外侧端,蜗轮与蜗杆啮合,蜗杆一端通过轴承连接在差速壳一侧,蜗杆另一端穿过差速壳的另一侧与差速传动齿轮固定连接,差速传动齿轮与差速从动齿轮内侧端啮合,差速从动齿轮外侧端与同步齿轮的一端啮合,同步齿轮另一端与行星架齿轮一端啮合,行星架齿轮固定连接在行星架的一端,行星架另一端活动连接有行星齿轮,行星齿轮内侧与太阳轮啮合,行星齿轮外侧与齿圈啮合,太阳轮固定连接在传动轴上,齿圈与电机啮合。本发明为差速,转向一体化设计,可替代当前车辆的转向系统,差速器,差速锁
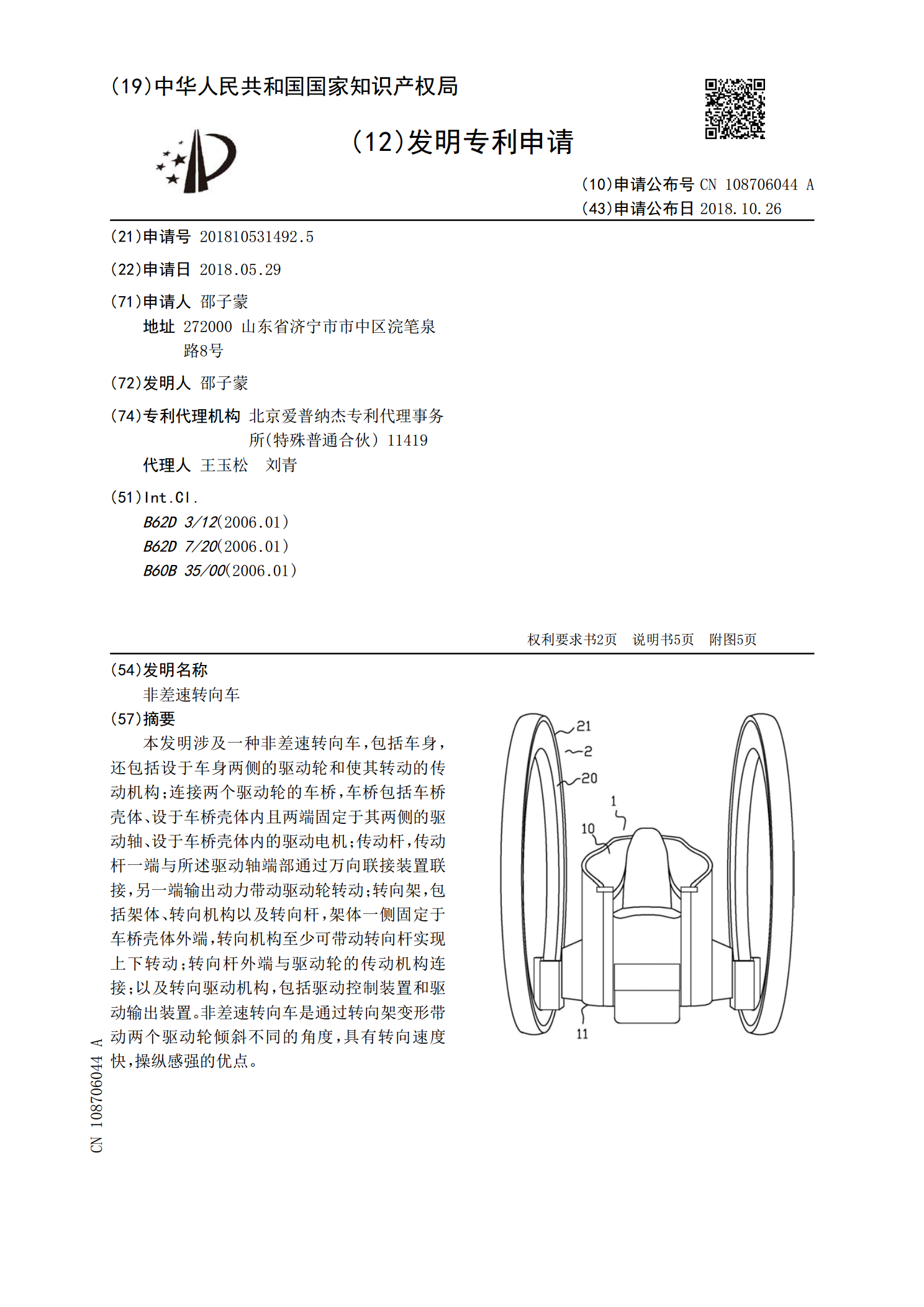
非差速转向车.pdf
本发明涉及一种非差速转向车,包括车身,还包括设于车身两侧的驱动轮和使其转动的传动机构;连接两个驱动轮的车桥,车桥包括车桥壳体、设于车桥壳体内且两端固定于其两侧的驱动轴、设于车桥壳体内的驱动电机;传动杆,传动杆一端与所述驱动轴端部通过万向联接装置联接,另一端输出动力带动驱动轮转动;转向架,包括架体、转向机构以及转向杆,架体一侧固定于车桥壳体外端,转向机构至少可带动转向杆实现上下转动;转向杆外端与驱动轮的传动机构连接;以及转向驱动机构,包括驱动控制装置和驱动输出装置。非差速转向车是通过转向架变形带动两个驱动轮