
工业取放料连杆机械手空间目标视觉抓取的研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

工业取放料连杆机械手空间目标视觉抓取的研究.docx
工业取放料连杆机械手空间目标视觉抓取的研究工业取放料连杆机械手空间目标视觉抓取的研究摘要:机器视觉在工业取放料连杆机械手抓取中的应用已经成为现代制造业中非常重要的技术之一。本文主要研究了工业机械手在空间目标视觉抓取中的应用,采用了视觉导引技术来实现对目标物体的精准抓取。本研究通过设计并实现了一个基于视觉导引的工业机械手系统,通过对目标物体的三维形状和位置进行识别和分析,确定机械手的抓取点并进行抓取动作。实验结果表明,该系统能够实现对不同形状和尺寸的目标物体的准确抓取,具有很好的应用前景。关键词:工业机械手

取料机械手抓取机构.pdf
本发明涉及机械工件加工技术领域,具体是涉及一种取料机械手抓取机构。横板的上部靠近伸缩机构伺服电机的一侧设置有连接架,横板上部的另一侧端部固定有轴承座;连接架的上部依次设有彼此相连接的抓取机构减速机和抓取机构伺服电机,与抓取机构减速机连接的第一同步轮通过第二同步带与置于轴承座上部的第二同步轮连接,置于轴承座内的第二轴承的顶部与第二同步轮连接,第二轴承的底部与支臂板连接,支臂板上连接有四个支臂,支臂的端部设有吸盘座,在吸盘座的底部设有风琴吸盘;通过抓取机构伺服电机工作,实现支臂板的旋转,以带动通过风琴吸盘吸紧
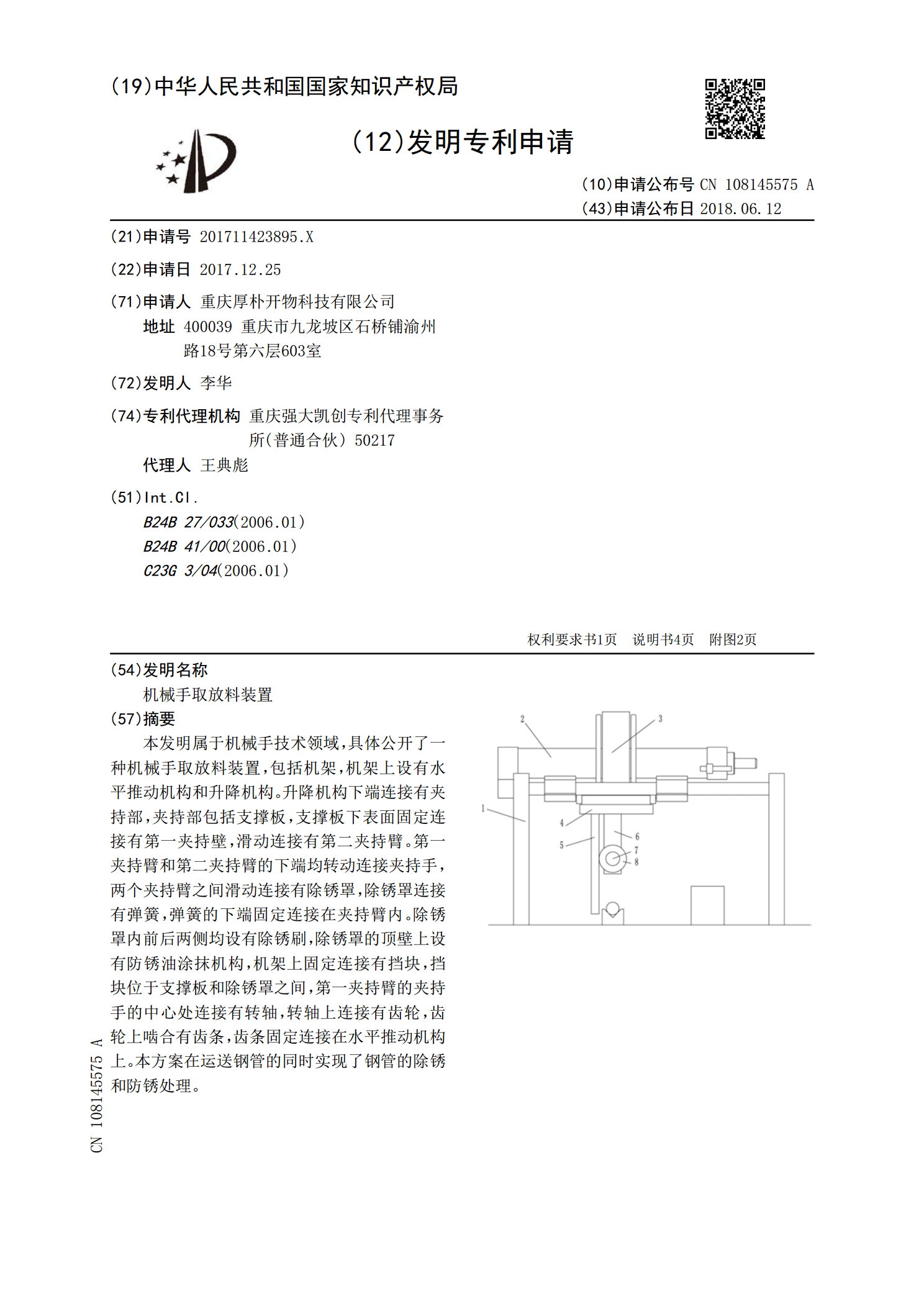
机械手取放料装置.pdf
本发明属于机械手技术领域,具体公开了一种机械手取放料装置,包括机架,机架上设有水平推动机构和升降机构。升降机构下端连接有夹持部,夹持部包括支撑板,支撑板下表面固定连接有第一夹持壁,滑动连接有第二夹持臂。第一夹持臂和第二夹持臂的下端均转动连接夹持手,两个夹持臂之间滑动连接有除锈罩,除锈罩连接有弹簧,弹簧的下端固定连接在夹持臂内。除锈罩内前后两侧均设有除锈刷,除锈罩的顶壁上设有防锈油涂抹机构,机架上固定连接有挡块,挡块位于支撑板和除锈罩之间,第一夹持臂的夹持手的中心处连接有转轴,转轴上连接有齿轮,齿轮上啮合有
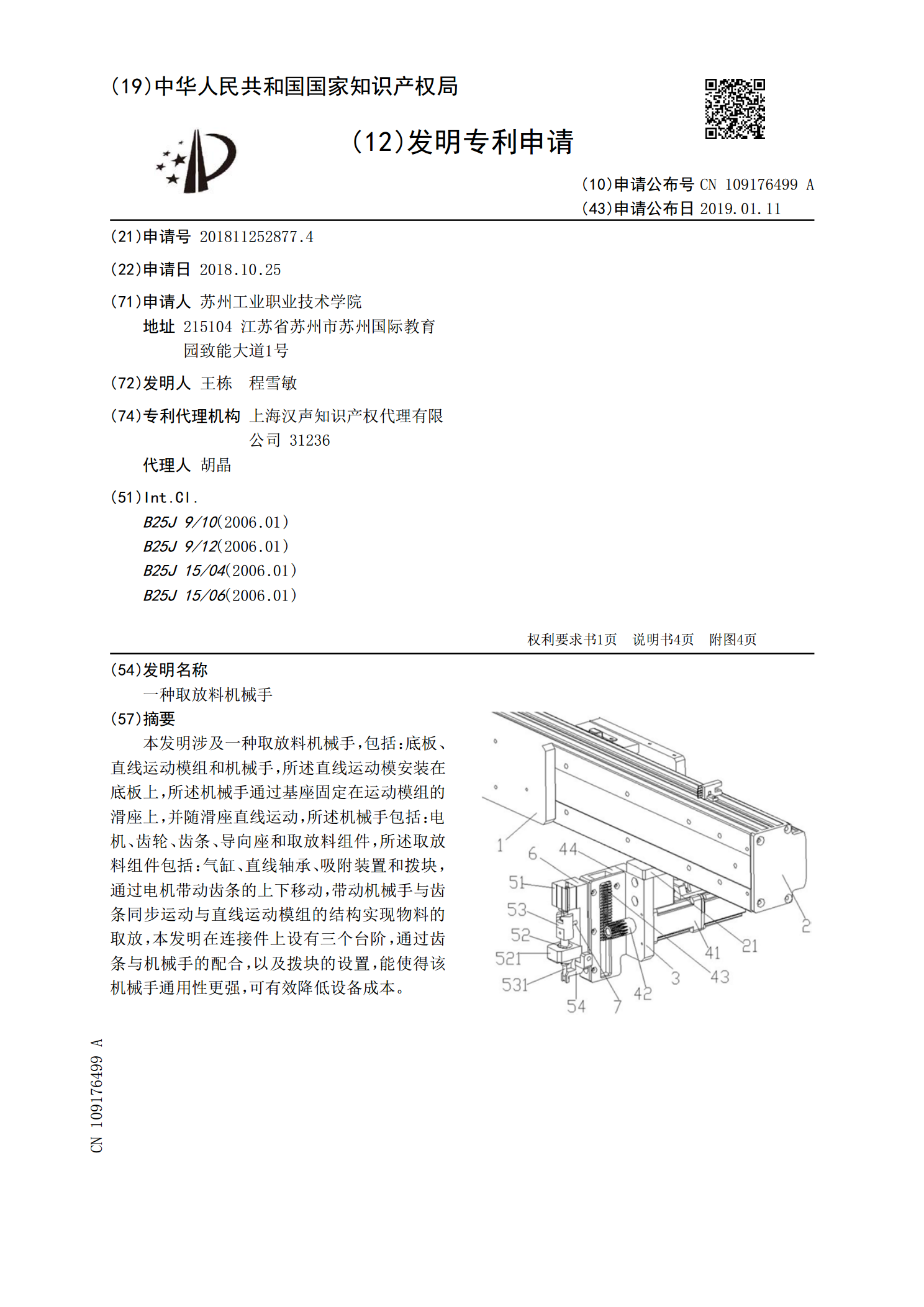
一种取放料机械手.pdf
本发明涉及一种取放料机械手,包括:底板、直线运动模组和机械手,所述直线运动模安装在底板上,所述机械手通过基座固定在运动模组的滑座上,并随滑座直线运动,所述机械手包括:电机、齿轮、齿条、导向座和取放料组件,所述取放料组件包括:气缸、直线轴承、吸附装置和拨块,通过电机带动齿条的上下移动,带动机械手与齿条同步运动与直线运动模组的结构实现物料的取放,本发明在连接件上设有三个台阶,通过齿条与机械手的配合,以及拨块的设置,能使得该机械手通用性更强,可有效降低设备成本。
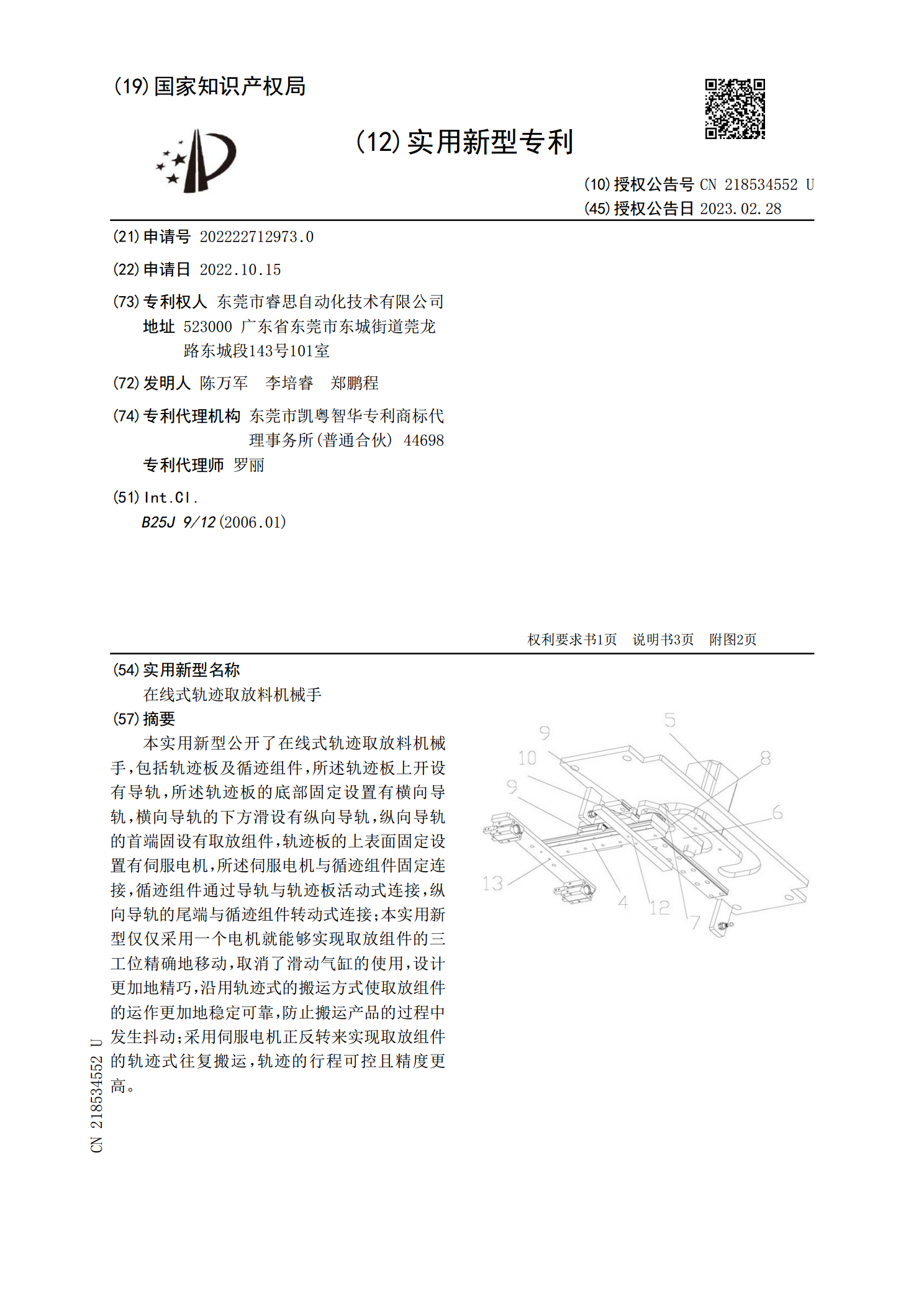
在线式轨迹取放料机械手.pdf
本实用新型公开了在线式轨迹取放料机械手,包括轨迹板及循迹组件,所述轨迹板上开设有导轨,所述轨迹板的底部固定设置有横向导轨,横向导轨的下方滑设有纵向导轨,纵向导轨的首端固设有取放组件,轨迹板的上表面固定设置有伺服电机,所述伺服电机与循迹组件固定连接,循迹组件通过导轨与轨迹板活动式连接,纵向导轨的尾端与循迹组件转动式连接;本实用新型仅仅采用一个电机就能够实现取放组件的三工位精确地移动,取消了滑动气缸的使用,设计更加地精巧,沿用轨迹式的搬运方式使取放组件的运作更加地稳定可靠,防止搬运产品的过程中发生抖动;采用伺