
一种封闭型两轮轿车自动平衡升降支撑系统.pdf

书生****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种封闭型两轮轿车自动平衡升降支撑系统.pdf
本发明涉及封闭型两轮轿车自动平衡升降支撑系统,可有效解决封闭型两轮轿车稳定、平衡、省力的方便支撑问题,结构是,车架后部中间装有驱动轮,驱动轮上面的车架上装有控制装置,车架前部的中间装有车轮,车轮上同轴装有磁盘,磁盘周边处装有均布的磁钢和霍尔传感器,前部车轮与后部的驱动轮之间的车架上装有蓄电池,车架的后部两边设置有对称的两个相同结构的升降装置,霍尔传感器与控制装置相连,控制装置控制驱动电机的正转或反转,驱动电机带动齿轮的正转或反转,齿轮通过齿条带动支架的升、降,构成自动平衡升降支架结构;本发明结构新颖独特,

一种两轮电动车自动升降支撑装置.pdf
本发明公开了一种两轮电动车自动升降支撑装置,包括主杆、连接环、副杆、车轮、电动液压推杆和连接带。设置主杆是左侧上端焊接一连接环,中部右侧设一固定电动液压推杆的支架,下端通过期轴销连接横向的副杆。设置副杆是一方体,中部上方设一固定电动液压推杆的支架,右端前后两侧通过轴销连接两车轮。设置电动液压推杆通过轴销连接在主杆与副杆的支架上。设置主杆、连接环、副杆、车轮和电动液压推杆及结构组成一支撑机构,对称的两个支撑机构通过两连接带连起。采用上述结构,将连接环固定在车的后减震上,控制电动液压推杆伸长和收缩,从而下降升

一种具有自动支撑结构的全封闭两轮电动车.pdf
本发明公开了一种具有自动支撑结构的全封闭两轮电动车,包括两轮车本体,所述两轮车本体包括车架、车轮、轮毂电机、整车控制器以及蓄电池,在车架外侧设有将车架包裹的车罩,在车架下方设有两自动支撑脚架,所述自动支撑脚架包括上支架、下支架、角度传感器、支撑轮以及直线推杆电机;在车架上还设有脚架控制器、三轴陀螺仪以及电机驱动器,所述轮毂电机、角度传感器、三轴陀螺仪、以及电机驱动器均与脚架控制器相连,所述直线推杆电机与电机驱动器相连。本发明能够遮挡风雨,并且能够在行走和停下时实现自动支撑,从而使安全性能更高,使用更加方便
一种自动升降支撑装置.pdf
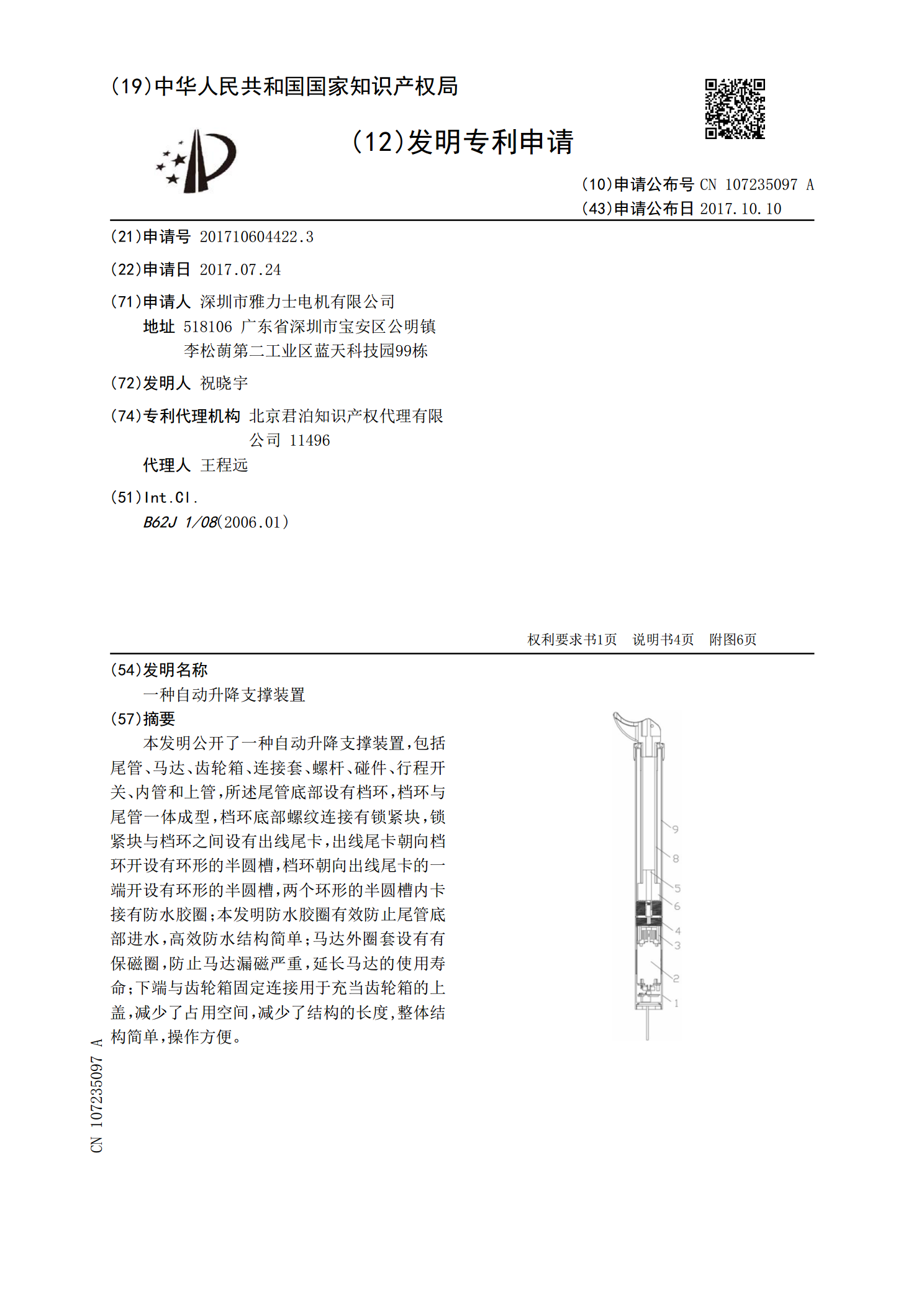
本发明公开了一种自动升降支撑装置,包括尾管、马达、齿轮箱、连接套、螺杆、碰件、行程开关、内管和上管,所述尾管底部设有档环,档环与尾管一体成型,档环底部螺纹连接有锁紧块,锁紧块与档环之间设有出线尾卡,出线尾卡朝向档环开设有环形的半圆槽,档环朝向出线尾卡的一端开设有环形的半圆槽,两个环形的半圆槽内卡接有防水胶圈;本发明防水胶圈有效防止尾管底部进水,高效防水结构简单;马达外圈套设有有保磁圈,防止马达漏磁严重,延长马达的使用寿命;下端与齿轮箱固定连接用于充当齿轮箱的上盖,减少了占用空间,减少了结构的长度,整体结构

一种轿车自动升降挪车装置.pdf
本发明公开了一种轿车自动升降挪车装置,包括升降机构、控制机构和主体机构,所述升降机构、控制机构设置在所述主体机构上。其不仅具有方便挪车和更换轮胎的功能,还可以在大型停车场作为用于停车的装置。