
一种防腐防爆的多功能热成像探测救援机器人.pdf

努力****恨风


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种防腐防爆的多功能热成像探测救援机器人.pdf
本发明公开了一种防腐防爆的多功能热成像探测救援机器人,包括轮履式机器人平台、机械手装置和监控仪,轮履式机器人平台包括底盘舱体,底盘舱体上设置有气体探测器、温度探测器、激光雷达和机械手装置,机械手装置包括机械手大臂,机械手大臂的前端通过机械手小臂与机械手相连,机械手大臂的末端铰接于支架上,支架通过可水平方向360度无限旋转的回转关节安装在设于底盘舱体顶板上的安装座上,机械手大臂的中部与电动推杆相连;监控仪通过电动伸缩杆安装在支架后侧。本发明适应环境性能强,能自建搜救地图,能在恶劣环境下代替人执行开关阀门堵漏

一种多功能无人探测机器人.pdf
本发明涉及一种多功能无人探测机器人,具有足式行走和轮式滚动两种运动方式,属于未知环境探测机器人技术领域。本发明主要解决现有机器人存在运行速度慢、体积大和重量较重等问题。本发明一种多功能无人探测机器人,由运动系统、信息采集系统、控制系统和上位机构成,运动系统又分为轮式运动系统和足式运动系统,信息采集系统由样本采收装置、图像采集装置、图像显示装置和传感器信息采集装置组成,控制系统由主控制板、主控制器、辅助控制器、电源稳压模块、语音识别模块、舵机驱动接口、无线通信模块和传感器驱动模块组成。本发明具有性价比高、体

一种生命探测与救援机器人.pdf
本发明公开了一种生命探测与救援机器人,包括壳体、导向装置、行走装置、输料管、通话模块和与机器人配套使用的外部控制器,导向装置设置在壳体前端,壳体内腔设有微控制器和定位装置,输料管前端从导向装置穿出,后端通过壳体内腔从壳体尾部穿出,通话模块分别设置在导向装置内和壳体尾部,行走装置为陀螺轮,设置在壳体两侧。该机器人能在地震及灾后救援环境恶劣的情况下,完成对生命的寻找探测、位置确定以及实施多项救援等,而且体积微小,在救援过程中,即便机器人任意翻转滚动,也能在狭小空间继续行走,适应环境能力强。
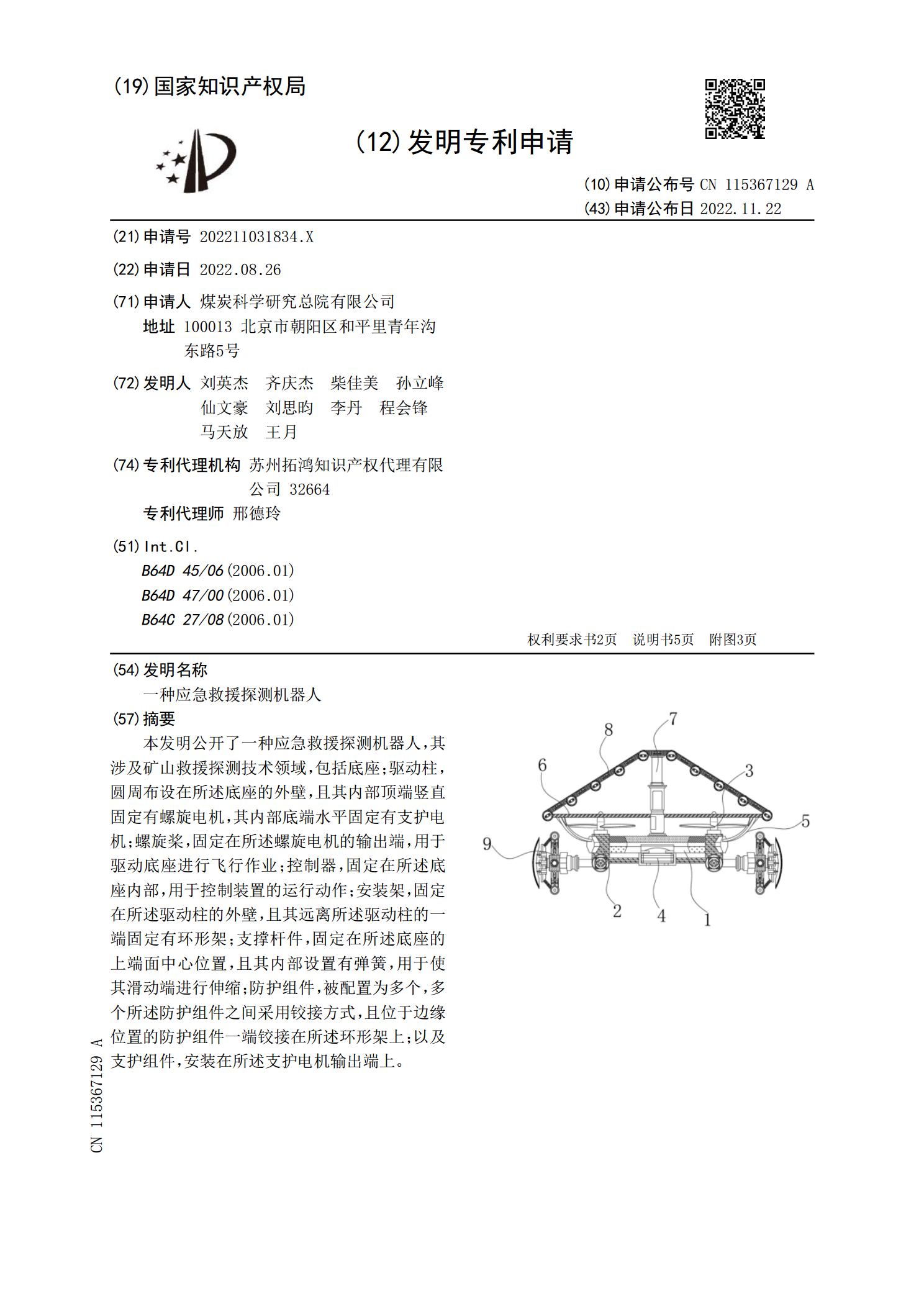
一种应急救援探测机器人.pdf
本发明公开了一种应急救援探测机器人,其涉及矿山救援探测技术领域,包括底座;驱动柱,圆周布设在所述底座的外壁,且其内部顶端竖直固定有螺旋电机,其内部底端水平固定有支护电机;螺旋桨,固定在所述螺旋电机的输出端,用于驱动底座进行飞行作业;控制器,固定在所述底座内部,用于控制装置的运行动作;安装架,固定在所述驱动柱的外壁,且其远离所述驱动柱的一端固定有环形架;支撑杆件,固定在所述底座的上端面中心位置,且其内部设置有弹簧,用于使其滑动端进行伸缩;防护组件,被配置为多个,多个所述防护组件之间采用铰接方式,且位于边缘位
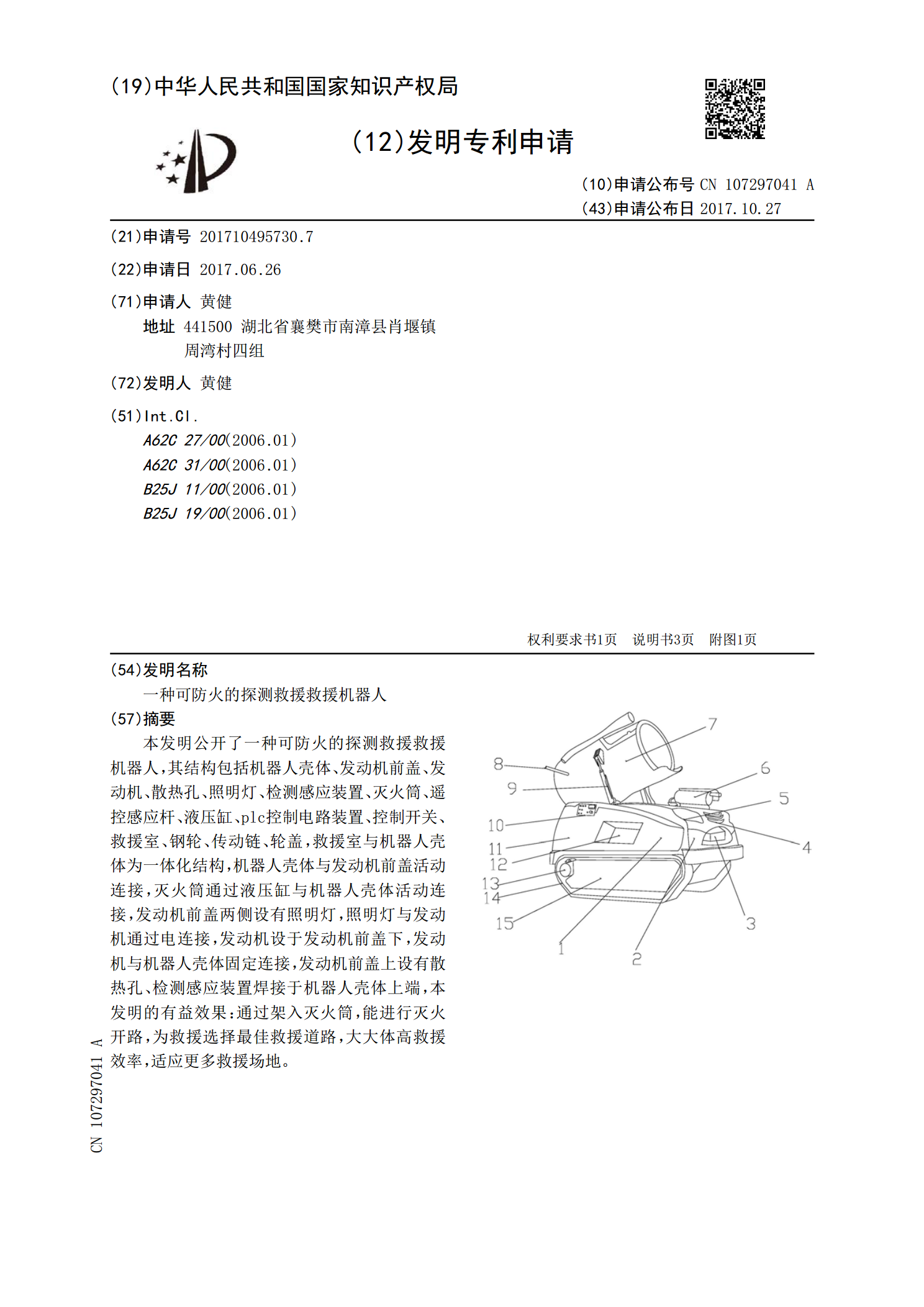
一种可防火的探测救援救援机器人.pdf
本发明公开了一种可防火的探测救援救援机器人,其结构包括机器人壳体、发动机前盖、发动机、散热孔、照明灯、检测感应装置、灭火筒、遥控感应杆、液压缸、plc控制电路装置、控制开关、救援室、钢轮、传动链、轮盖,救援室与机器人壳体为一体化结构,机器人壳体与发动机前盖活动连接,灭火筒通过液压缸与机器人壳体活动连接,发动机前盖两侧设有照明灯,照明灯与发动机通过电连接,发动机设于发动机前盖下,发动机与机器人壳体固定连接,发动机前盖上设有散热孔、检测感应装置焊接于机器人壳体上端,本发明的有益效果:通过架入灭火筒,能进行灭火