
一种应急救援探测机器人.pdf

Ja****20

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种应急救援探测机器人.pdf
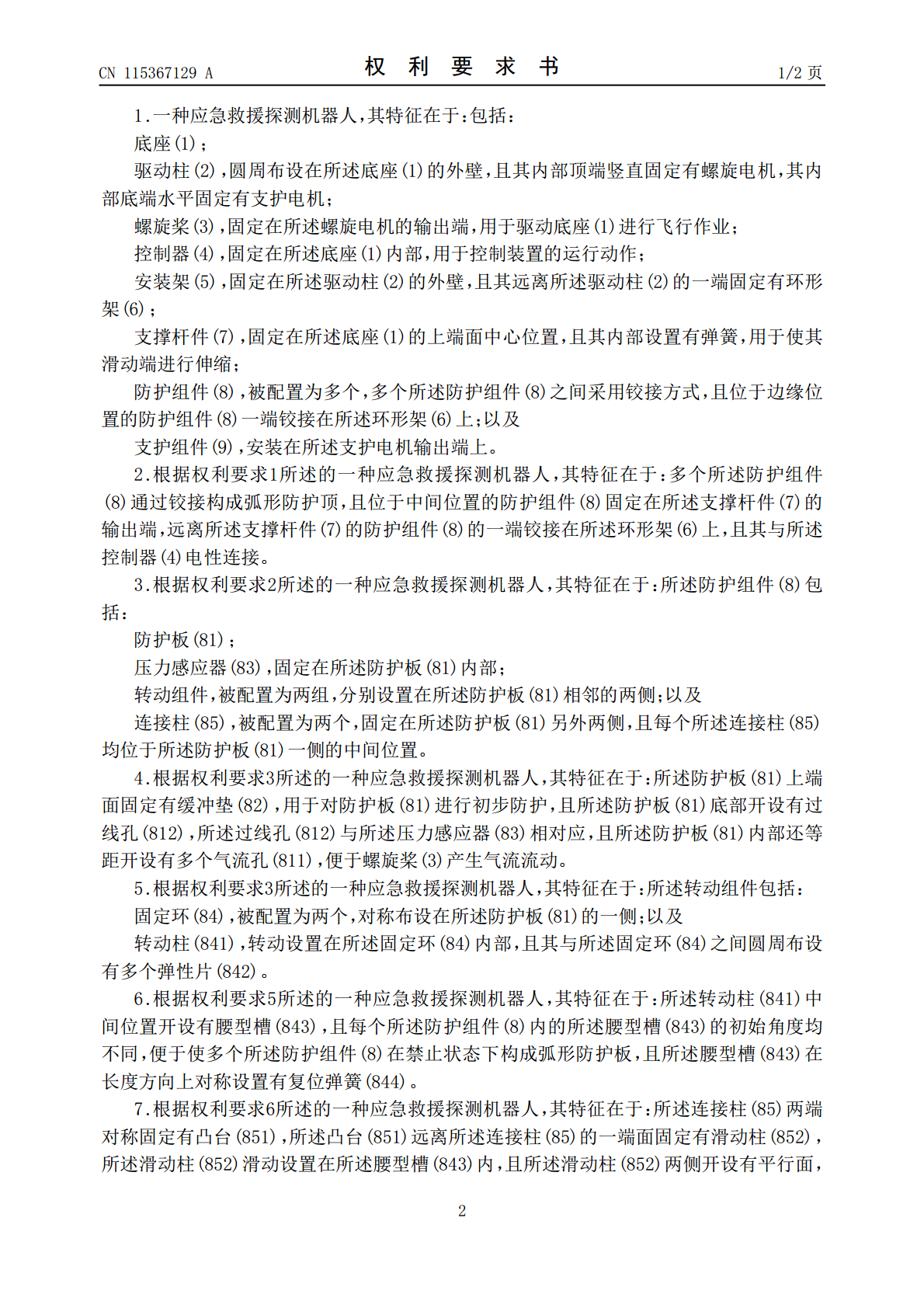
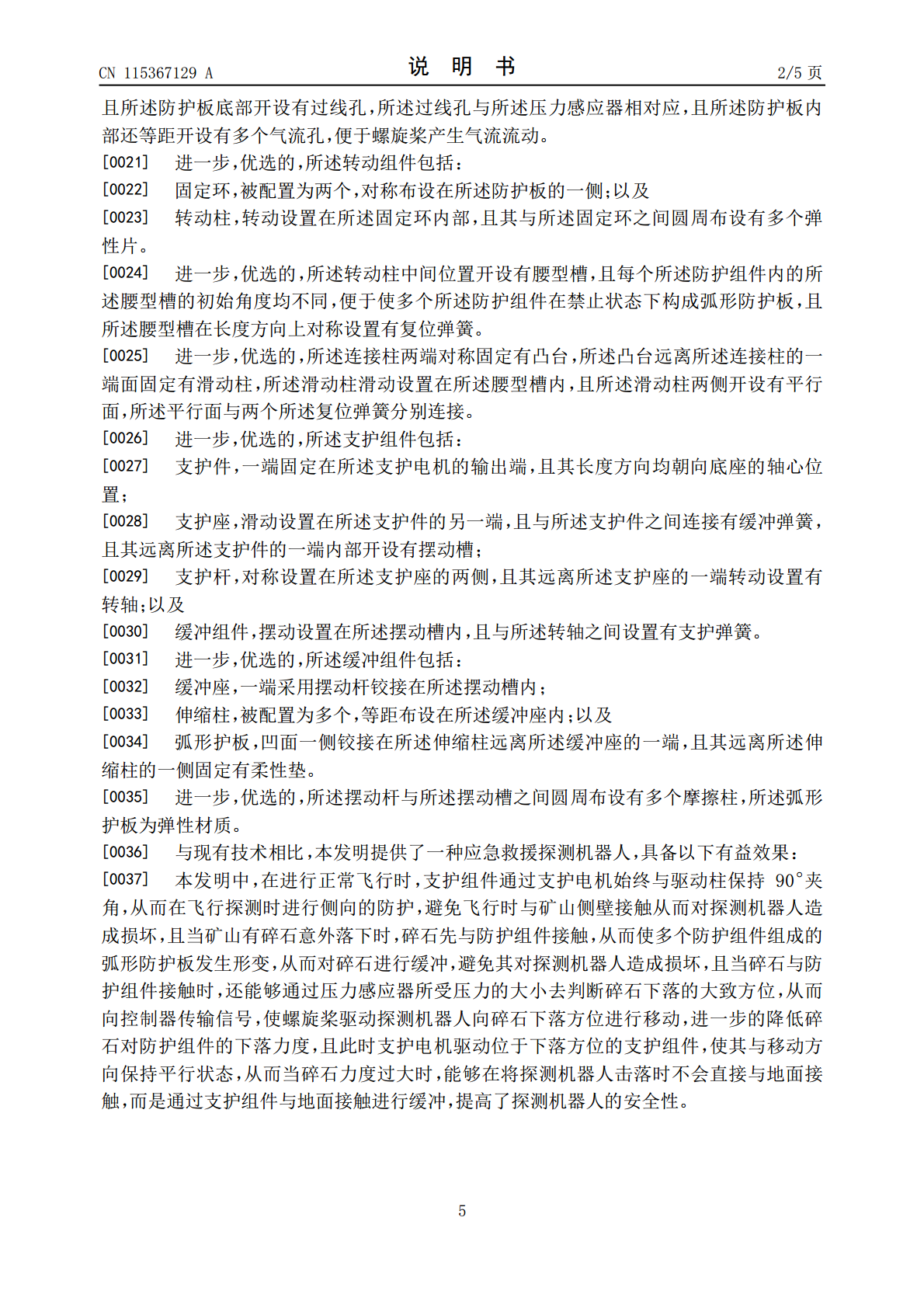
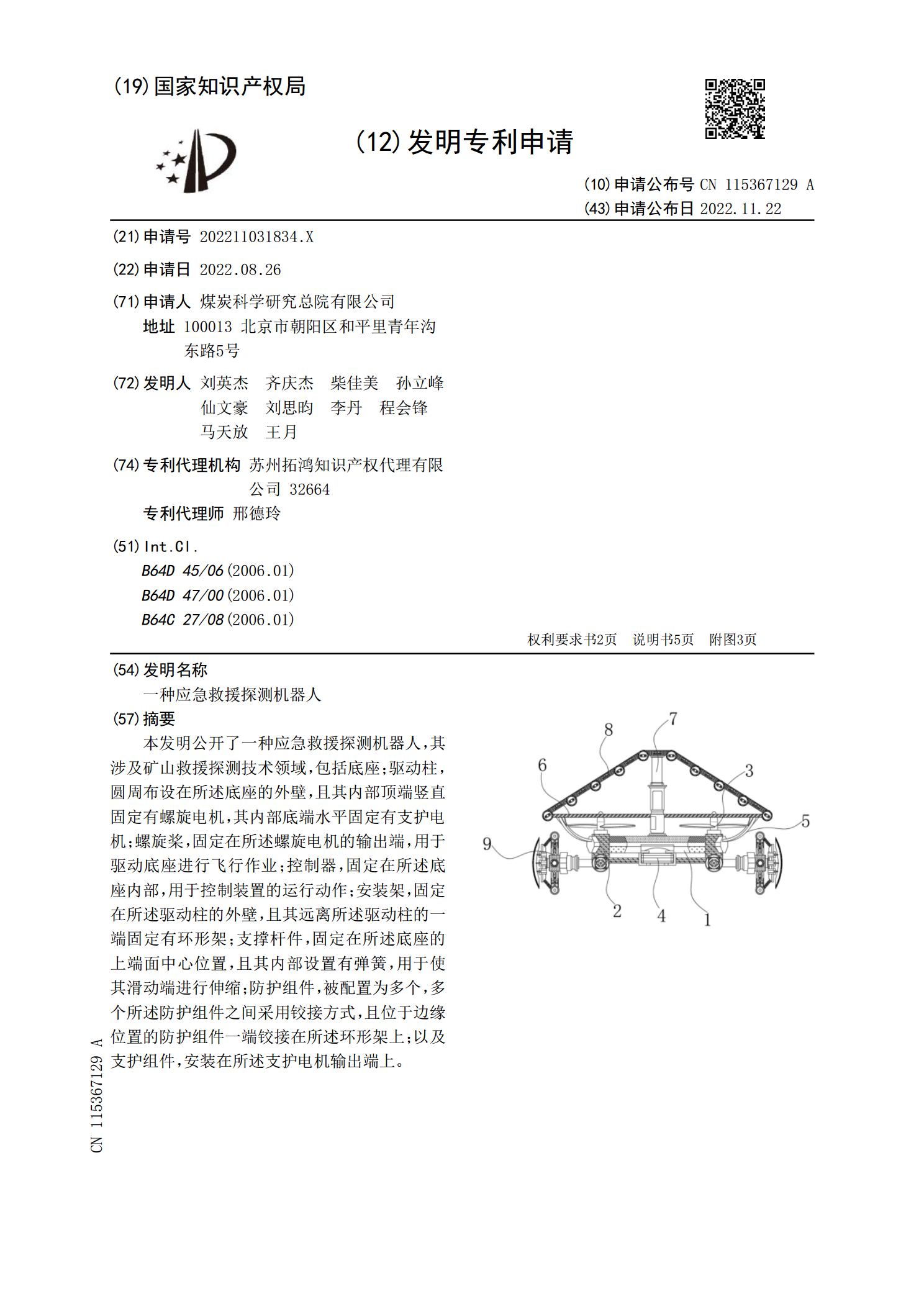
本发明公开了一种应急救援探测机器人,其涉及矿山救援探测技术领域,包括底座;驱动柱,圆周布设在所述底座的外壁,且其内部顶端竖直固定有螺旋电机,其内部底端水平固定有支护电机;螺旋桨,固定在所述螺旋电机的输出端,用于驱动底座进行飞行作业;控制器,固定在所述底座内部,用于控制装置的运行动作;安装架,固定在所述驱动柱的外壁,且其远离所述驱动柱的一端固定有环形架;支撑杆件,固定在所述底座的上端面中心位置,且其内部设置有弹簧,用于使其滑动端进行伸缩;防护组件,被配置为多个,多个所述防护组件之间采用铰接方式,且位于边缘位

一种生命探测与救援机器人.pdf
本发明公开了一种生命探测与救援机器人,包括壳体、导向装置、行走装置、输料管、通话模块和与机器人配套使用的外部控制器,导向装置设置在壳体前端,壳体内腔设有微控制器和定位装置,输料管前端从导向装置穿出,后端通过壳体内腔从壳体尾部穿出,通话模块分别设置在导向装置内和壳体尾部,行走装置为陀螺轮,设置在壳体两侧。该机器人能在地震及灾后救援环境恶劣的情况下,完成对生命的寻找探测、位置确定以及实施多项救援等,而且体积微小,在救援过程中,即便机器人任意翻转滚动,也能在狭小空间继续行走,适应环境能力强。
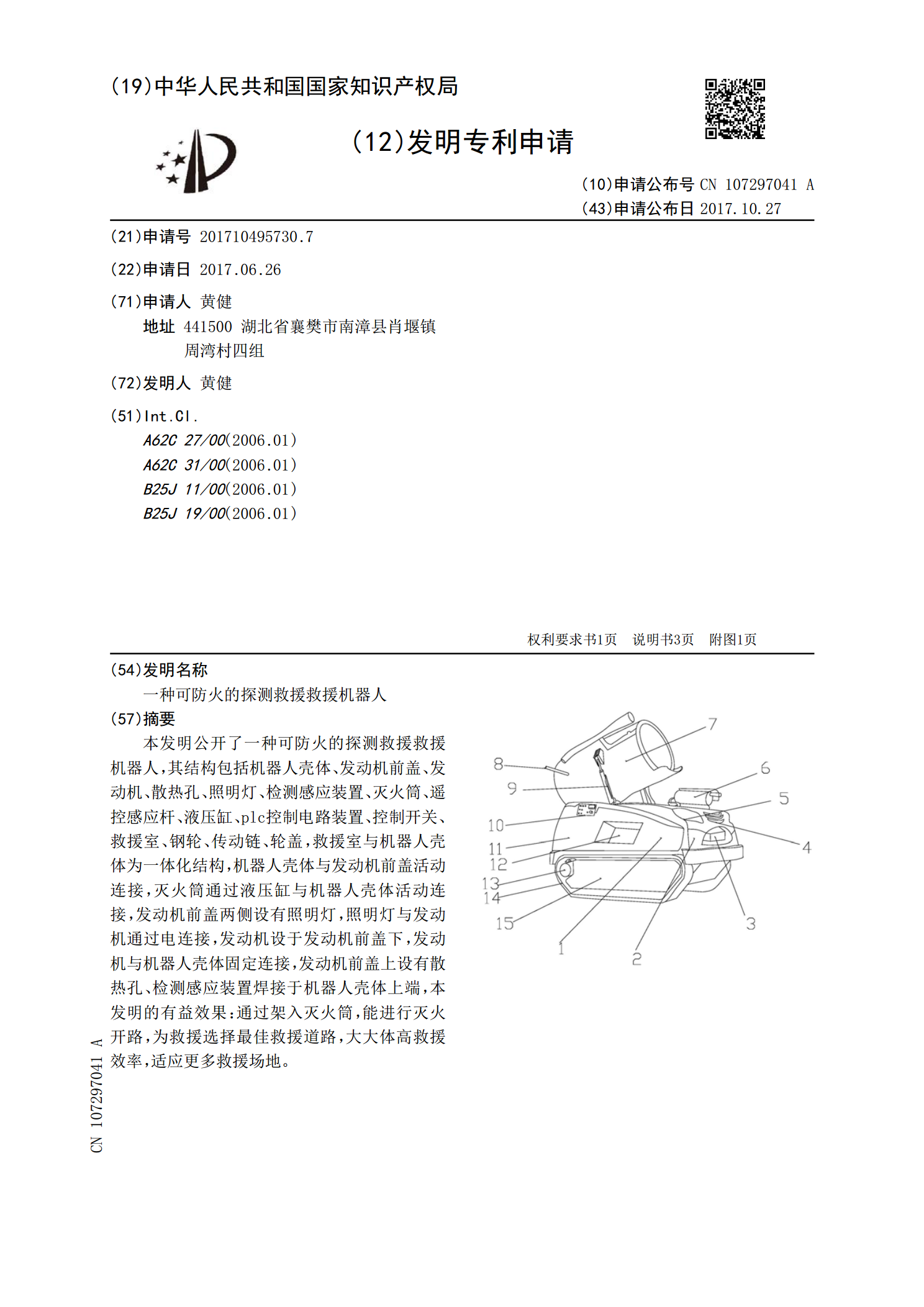
一种可防火的探测救援救援机器人.pdf
本发明公开了一种可防火的探测救援救援机器人,其结构包括机器人壳体、发动机前盖、发动机、散热孔、照明灯、检测感应装置、灭火筒、遥控感应杆、液压缸、plc控制电路装置、控制开关、救援室、钢轮、传动链、轮盖,救援室与机器人壳体为一体化结构,机器人壳体与发动机前盖活动连接,灭火筒通过液压缸与机器人壳体活动连接,发动机前盖两侧设有照明灯,照明灯与发动机通过电连接,发动机设于发动机前盖下,发动机与机器人壳体固定连接,发动机前盖上设有散热孔、检测感应装置焊接于机器人壳体上端,本发明的有益效果:通过架入灭火筒,能进行灭火
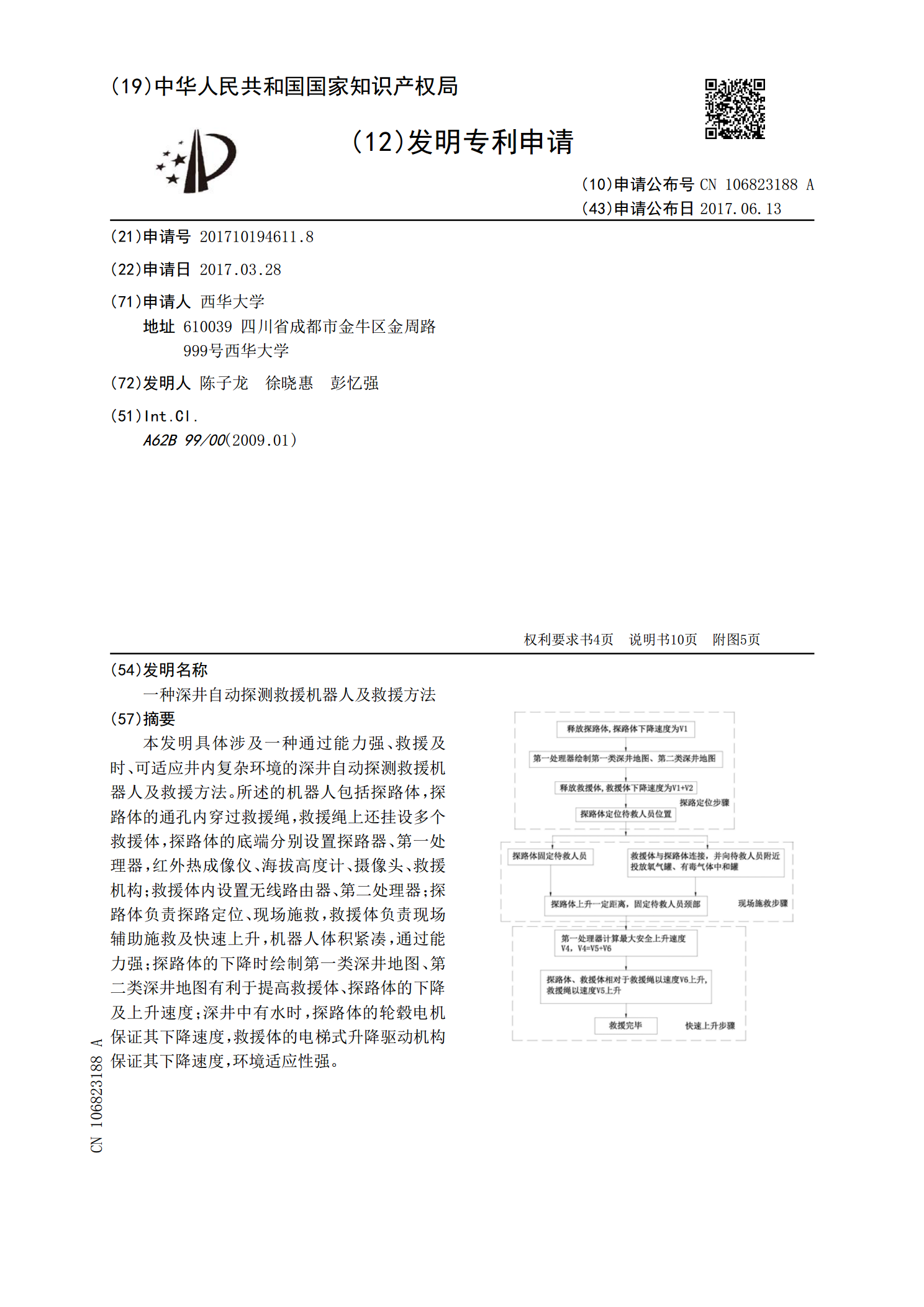
一种深井自动探测救援机器人及救援方法.pdf
本发明具体涉及一种通过能力强、救援及时、可适应井内复杂环境的深井自动探测救援机器人及救援方法。所述的机器人包括探路体,探路体的通孔内穿过救援绳,救援绳上还挂设多个救援体,探路体的底端分别设置探路器、第一处理器,红外热成像仪、海拔高度计、摄像头、救援机构;救援体内设置无线路由器、第二处理器;探路体负责探路定位、现场施救,救援体负责现场辅助施救及快速上升,机器人体积紧凑,通过能力强;探路体的下降时绘制第一类深井地图、第二类深井地图有利于提高救援体、探路体的下降及上升速度;深井中有水时,探路体的轮毂电机保证其下

一种轮履式探测救援机器人.pdf
本发明公开了一种轮履式探测救援机器人,包括机械臂组件、轮履组件、顶撑组件、摄像头和车身;机械臂组件通过电机驱动,可实现水平平面和竖直平面的转动,机械臂前段配置传感器进行探测;轮履组件包括主支架、主动轮组件、支撑轮、张紧轮和履带;顶撑组件包括顶撑滑动组件和顶撑,顶撑滑动组件通过电机驱动机械爪的开合,顶撑组件通过一二三级套筒实现撑定重物。本发明可实现对灾害现场的辅助救援,地面适应性强,速度快。本发明结构采用模块化设计,拆装方便,易于维护。