
基于二维码带的AGV定位方法及系统.pdf

猫巷****奕声


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于二维码带的AGV定位方法及系统.pdf
一种基于二维码带的AGV定位方法及系统,通过在AGV的轨道侧边铺设连续二维码带,由设置于AGV的前轮侧面的二维码位置传感器周期性读取二维码带上的二维码,据此获得AGV在轨道上的位置,通过对所得到的二维码的绝对位置值进行差分,获得差分速度信号,然后对差分速度信号进行数字信号滤波,获取准确的AGV实时速度和位置信息。本发明通过使用二维码带的绝对位置测量方法,不仅能够计算出AGV在任何轨道上的绝对位置,同时能够实时计算出AGV的速度,并能够按照外部的控制需求,以期望的速度控制AGV移动,或者控制AGV定停到指定

一种基于二维码定位导航的AGV系统及其方法.pdf
本发明提出了一种基于二维码定位导航的AGV系统及其方法,包括有控制系统、检测系统、驱动系统、显示系统以及电源系统,控制系统包括有STM32微控制器、电脑上位机和按钮模块;检测系统包括有摄像头、灰度传感器和红外传感器;灰度传感器与STM32微控制器信号连接,红外传感器环绕AGV设置,驱动系统包括有带编码器直流电机、四路驱动器以及麦克纳姆轮;显示系统包括有LCD屏幕和LED指示灯;电源系统包括有蓄电池、电源电压检测模块、电源保护模块,电源电压检测模块与控制系统电性连接,电源电压检测模块中设置有阈值单元,AGV
基于倒角距离形状匹配的AGV初始定位方法及定位系统.pdf
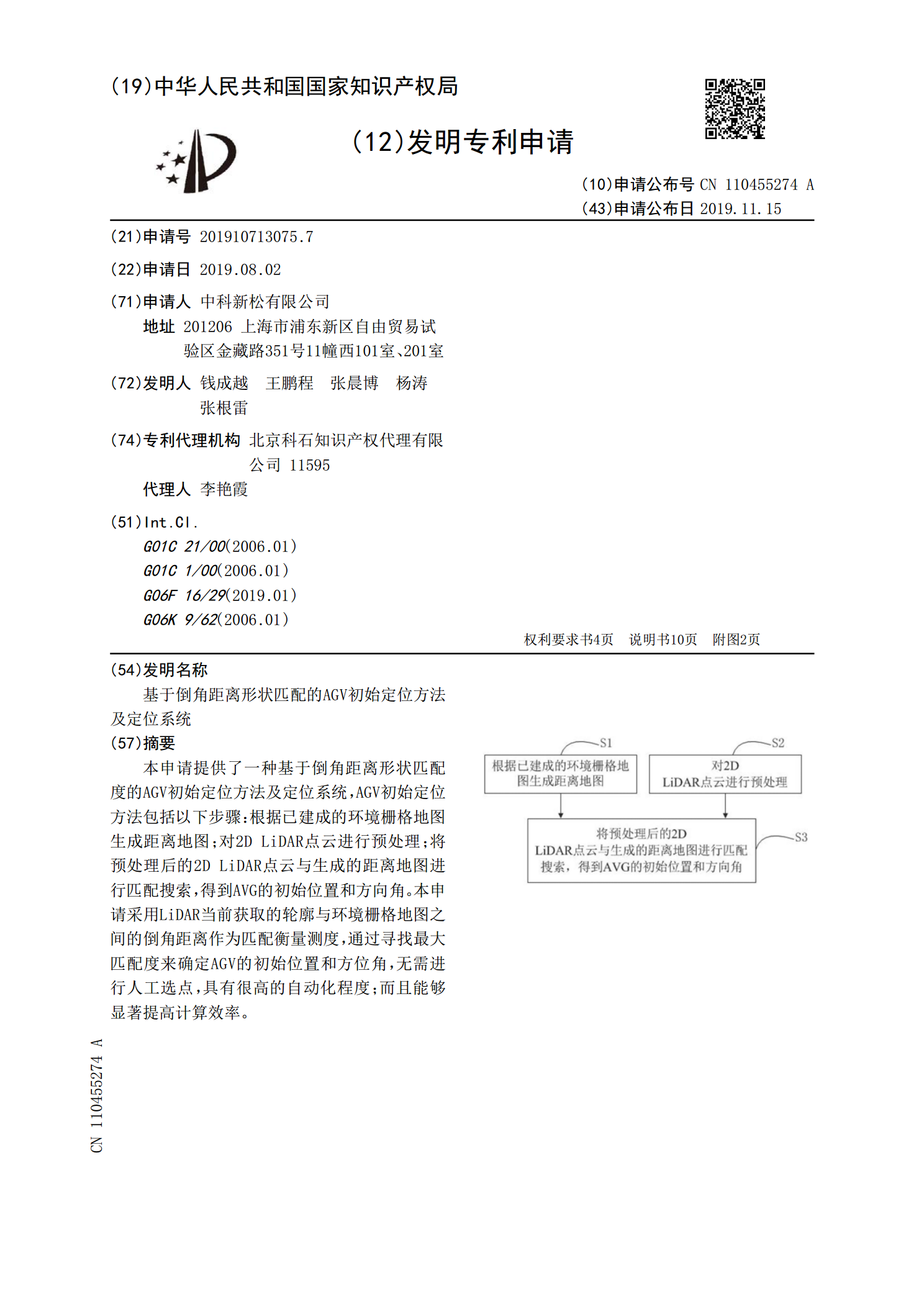
本申请提供了一种基于倒角距离形状匹配度的AGV初始定位方法及定位系统,AGV初始定位方法包括以下步骤:根据已建成的环境栅格地图生成距离地图;对2DLiDAR点云进行预处理;将预处理后的2DLiDAR点云与生成的距离地图进行匹配搜索,得到AVG的初始位置和方向角。本申请采用LiDAR当前获取的轮廓与环境栅格地图之间的倒角距离作为匹配衡量测度,通过寻找最大匹配度来确定AGV的初始位置和方位角,无需进行人工选点,具有很高的自动化程度;而且能够显著提高计算效率。
AGV小车的定位系统及其定位方法.pdf
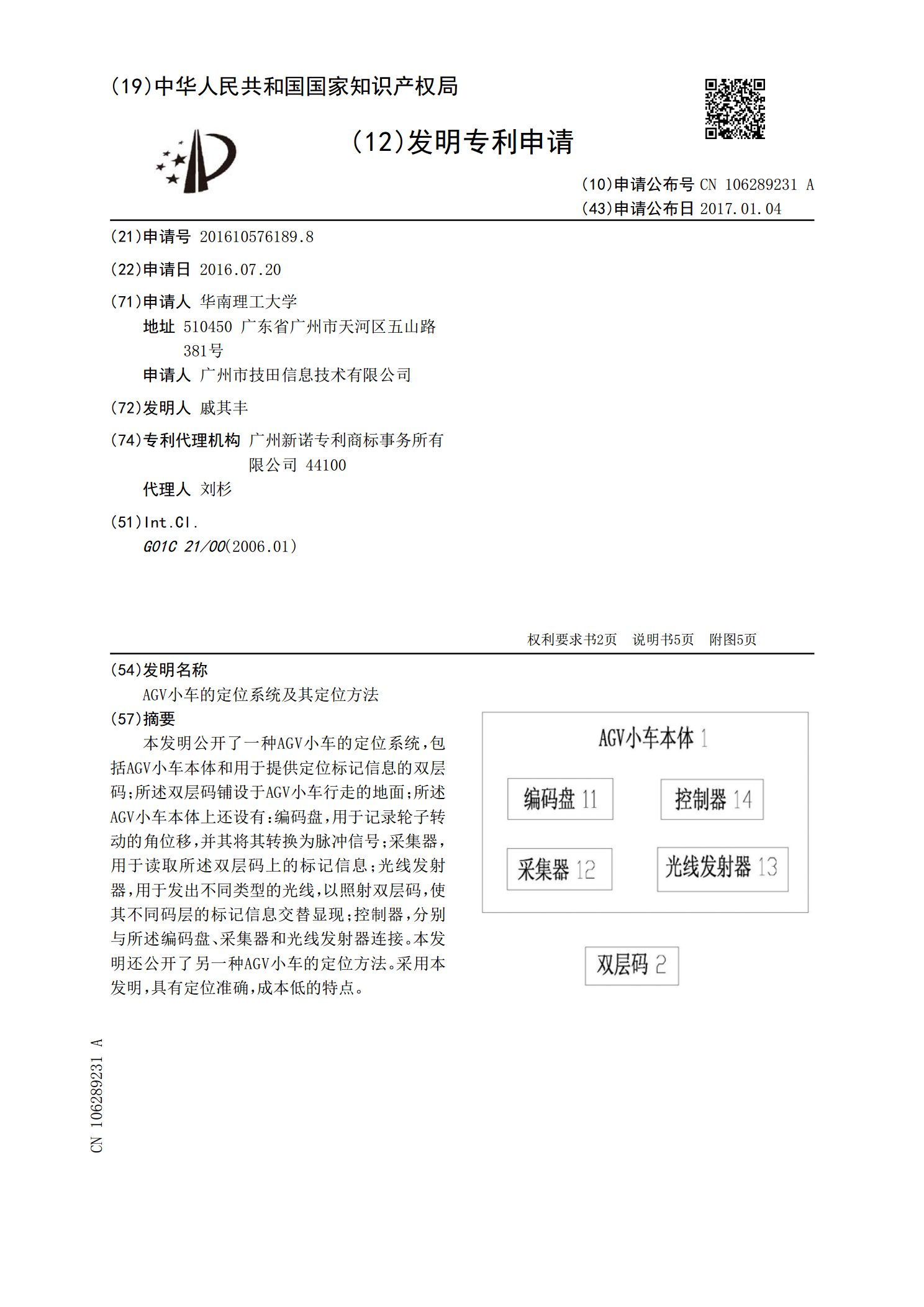
本发明公开了一种AGV小车的定位系统,包括AGV小车本体和用于提供定位标记信息的双层码;所述双层码铺设于AGV小车行走的地面;所述AGV小车本体上还设有:编码盘,用于记录轮子转动的角位移,并其将其转换为脉冲信号;采集器,用于读取所述双层码上的标记信息;光线发射器,用于发出不同类型的光线,以照射双层码,使其不同码层的标记信息交替显现;控制器,分别与所述编码盘、采集器和光线发射器连接。本发明还公开了另一种AGV小车的定位方法。采用本发明,具有定位准确,成本低的特点。

一种基于二维码的激光导航AGV高精度定位方法.pdf
本发明涉及智能移动机器人技术领域,尤其是涉及一种基于二维码的激光导航AGV高精度定位方法,该方法在AGV车体上安装二维码相机,通过在激光导航终点附近,距离料架一段固定距离的地面贴制二维码标签,AGV到达激光导航终点,二维码相机读到二维码后,进入二次定位环节,精准获取AGV在二维码坐标下的位姿偏差,规划出一条可行路径,然后通过PID算法跟踪路径,利用两轮差速运动模型计算出左右轮的速度,AGV跟随路径行驶,实时纠偏AGV与路径之间的偏差,最后准确到达指定位置。相较于现有技术,本发明实现了从激光导航到二维码导航