
基于倒角距离形状匹配的AGV初始定位方法及定位系统.pdf

是你****噩呀


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于倒角距离形状匹配的AGV初始定位方法及定位系统.pdf
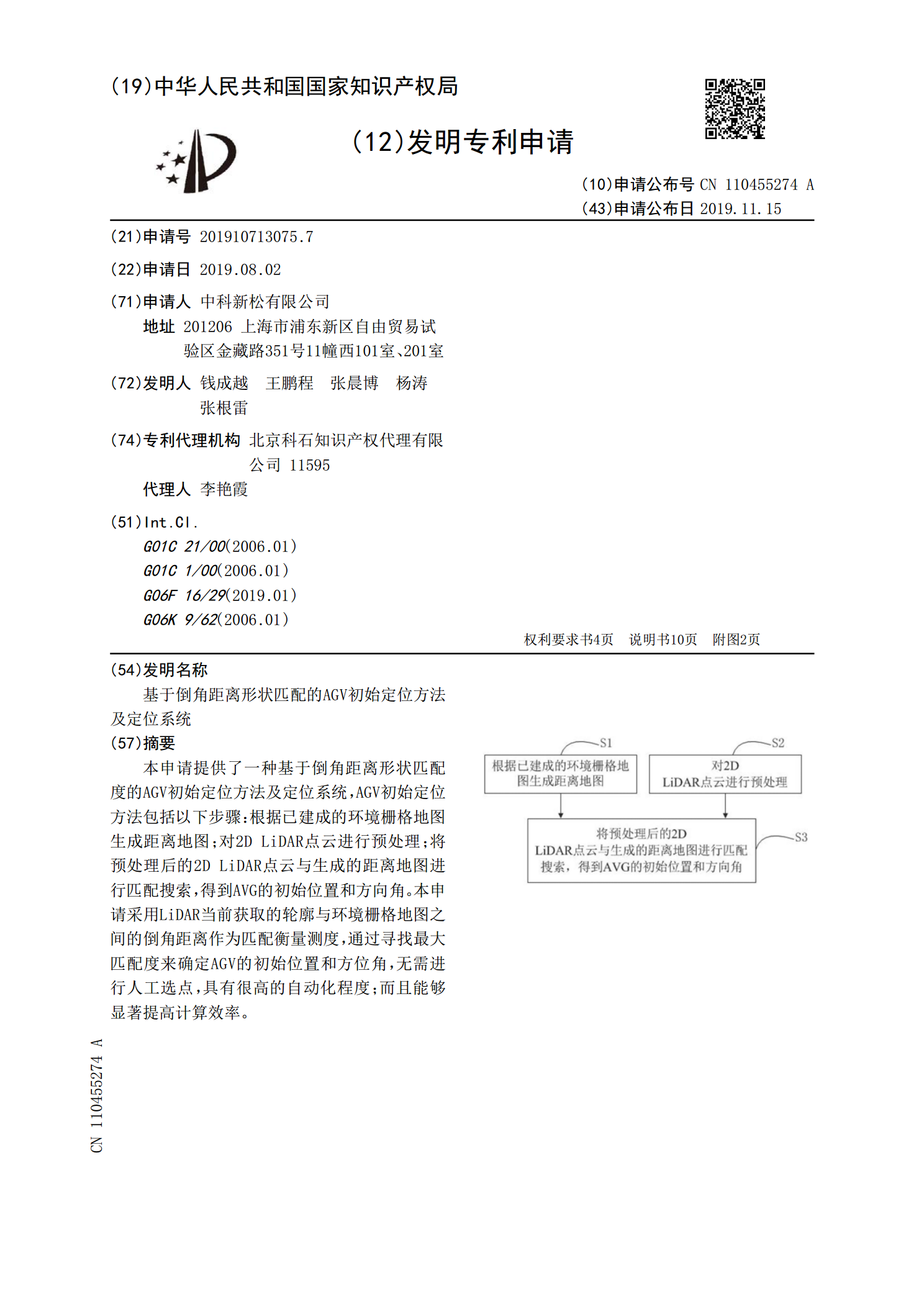
本申请提供了一种基于倒角距离形状匹配度的AGV初始定位方法及定位系统,AGV初始定位方法包括以下步骤:根据已建成的环境栅格地图生成距离地图;对2DLiDAR点云进行预处理;将预处理后的2DLiDAR点云与生成的距离地图进行匹配搜索,得到AVG的初始位置和方向角。本申请采用LiDAR当前获取的轮廓与环境栅格地图之间的倒角距离作为匹配衡量测度,通过寻找最大匹配度来确定AGV的初始位置和方位角,无需进行人工选点,具有很高的自动化程度;而且能够显著提高计算效率。

多目标射频定位系统、定位方法及初始距离量测方法.pdf
本发明提供了一种多目标射频定位系统、定位方法及初始距离量测方法,该多目标射频定位系统包含有多个收发器、至少一定位标签、一信号模组及一运算主机,该至少一定位标签设置于欲定位的目标物上,由收发器产生一发射信号及一发射信号电磁波;定位标签接收该发射信号电磁波并产生一调变信号电磁波;该收发器接收该调变信号电磁波并产生一调变信号;该信号模组中的处理单元将该调变信号藉由一识别信号解调变产生一接收信号,并将该接收信号与该发射信号混频得到一中频信号;一运算主机比对该中频信号与对应该中频信号的一初始中频信号得到一相位差,并

基于形状匹配的滨海遥感影像定位方法研究.docx
基于形状匹配的滨海遥感影像定位方法研究基于形状匹配的滨海遥感影像定位方法研究摘要:滨海地区的遥感影像定位在海岸线变化频繁的情况下具有一定的挑战性。本文提出了一种基于形状匹配的滨海遥感影像定位方法,该方法综合利用了特征提取、形状匹配和图像配准等技术。首先,利用特征提取算法获取滨海遥感影像中的显著特征。然后,应用形状匹配算法寻找与参考影像中类似形状的目标物体或地标。最后,通过图像配准算法精确地定位滨海遥感影像。实验结果表明,本文提出的方法有效地解决了滨海地区遥感影像定位中的问题,具有一定的实用价值。关键词:滨
AGV小车的定位系统及其定位方法.pdf
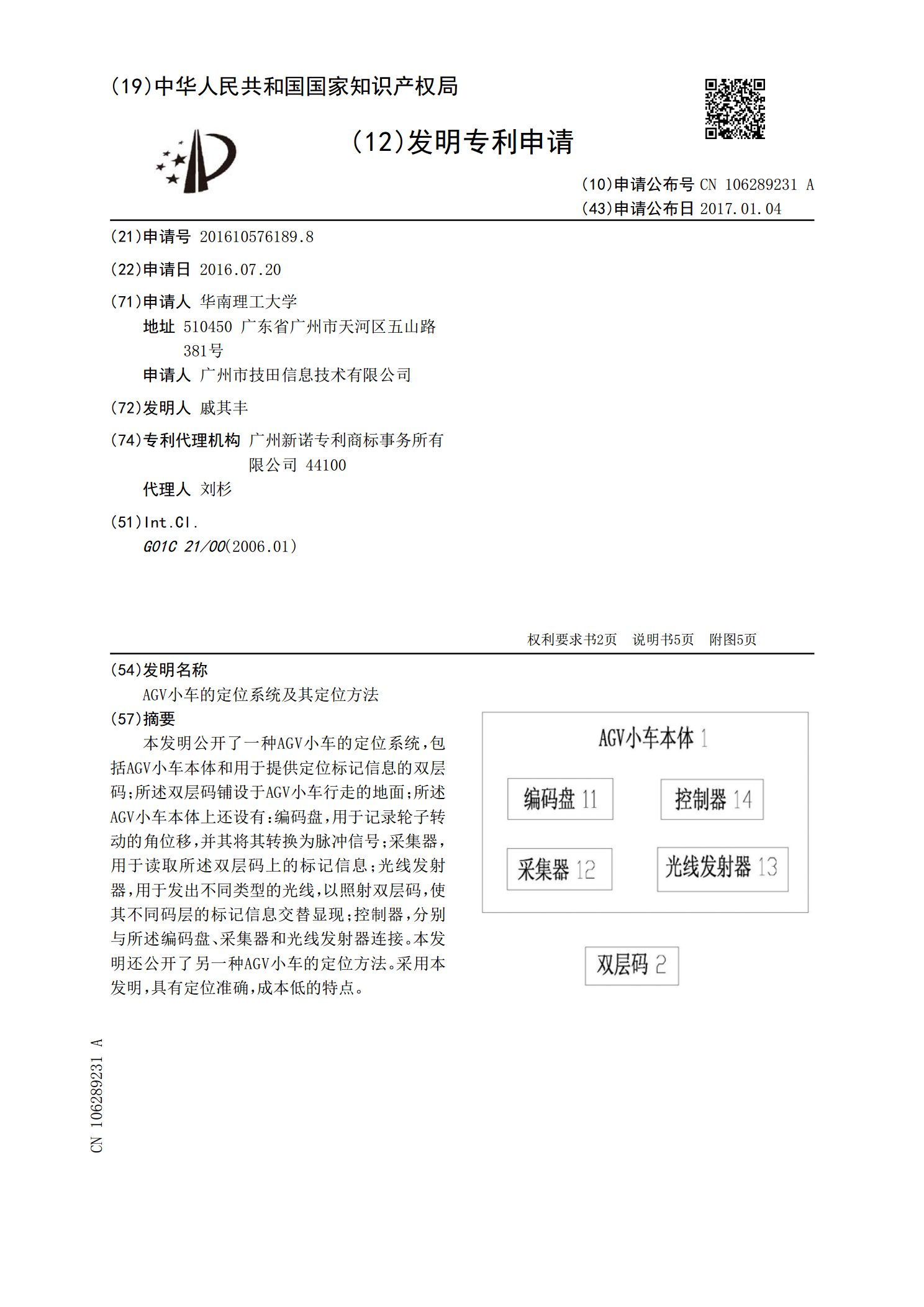
本发明公开了一种AGV小车的定位系统,包括AGV小车本体和用于提供定位标记信息的双层码;所述双层码铺设于AGV小车行走的地面;所述AGV小车本体上还设有:编码盘,用于记录轮子转动的角位移,并其将其转换为脉冲信号;采集器,用于读取所述双层码上的标记信息;光线发射器,用于发出不同类型的光线,以照射双层码,使其不同码层的标记信息交替显现;控制器,分别与所述编码盘、采集器和光线发射器连接。本发明还公开了另一种AGV小车的定位方法。采用本发明,具有定位准确,成本低的特点。

基于二维码带的AGV定位方法及系统.pdf
一种基于二维码带的AGV定位方法及系统,通过在AGV的轨道侧边铺设连续二维码带,由设置于AGV的前轮侧面的二维码位置传感器周期性读取二维码带上的二维码,据此获得AGV在轨道上的位置,通过对所得到的二维码的绝对位置值进行差分,获得差分速度信号,然后对差分速度信号进行数字信号滤波,获取准确的AGV实时速度和位置信息。本发明通过使用二维码带的绝对位置测量方法,不仅能够计算出AGV在任何轨道上的绝对位置,同时能够实时计算出AGV的速度,并能够按照外部的控制需求,以期望的速度控制AGV移动,或者控制AGV定停到指定