
一种基于二维码的激光导航AGV高精度定位方法.pdf

猫巷****忠娟


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于二维码的激光导航AGV高精度定位方法.pdf
本发明涉及智能移动机器人技术领域,尤其是涉及一种基于二维码的激光导航AGV高精度定位方法,该方法在AGV车体上安装二维码相机,通过在激光导航终点附近,距离料架一段固定距离的地面贴制二维码标签,AGV到达激光导航终点,二维码相机读到二维码后,进入二次定位环节,精准获取AGV在二维码坐标下的位姿偏差,规划出一条可行路径,然后通过PID算法跟踪路径,利用两轮差速运动模型计算出左右轮的速度,AGV跟随路径行驶,实时纠偏AGV与路径之间的偏差,最后准确到达指定位置。相较于现有技术,本发明实现了从激光导航到二维码导航

一种基于二维码定位导航的AGV系统及其方法.pdf
本发明提出了一种基于二维码定位导航的AGV系统及其方法,包括有控制系统、检测系统、驱动系统、显示系统以及电源系统,控制系统包括有STM32微控制器、电脑上位机和按钮模块;检测系统包括有摄像头、灰度传感器和红外传感器;灰度传感器与STM32微控制器信号连接,红外传感器环绕AGV设置,驱动系统包括有带编码器直流电机、四路驱动器以及麦克纳姆轮;显示系统包括有LCD屏幕和LED指示灯;电源系统包括有蓄电池、电源电压检测模块、电源保护模块,电源电压检测模块与控制系统电性连接,电源电压检测模块中设置有阈值单元,AGV

一种具有高精度导航定位功能的AGV平台及导航方法.pdf
本发明提供了一种环境适应力强、能有效避免误报错的具有高精度导航定位功能的AGV平台,以及基于该平台的导航方法。AGV平台包括含有四驱舵轮的车体(1),在车体的底面的中线上的不同位置设置有第一视觉相机(2)和第二视觉相机(3),该中线的走向与车体的前进方向一致,在车体的底面的另一条中线上且偏离车体的中心点还设置有第三视觉相机(4),在车体的底面中心点处设置有RFID读卡器(5)。其导航方法为:当该AGV平台前进时,第一视觉相机和第二视觉相机对前进路径进行俯拍,RFID读卡器不断扫描路径上标记的RFID信息,
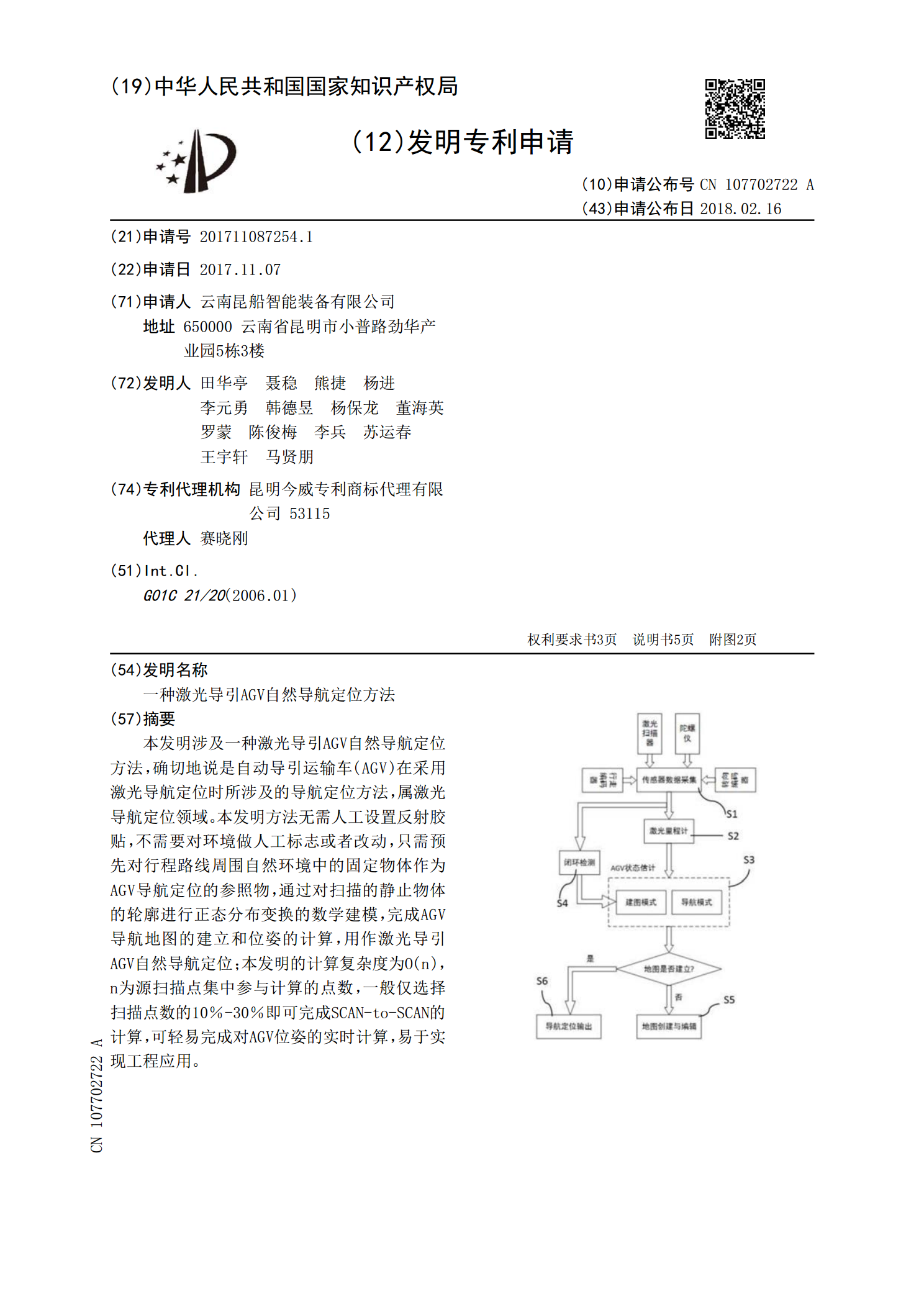
一种激光导引AGV自然导航定位方法.pdf
本发明涉及一种激光导引AGV自然导航定位方法,确切地说是自动导引运输车(AGV)在采用激光导航定位时所涉及的导航定位方法,属激光导航定位领域。本发明方法无需人工设置反射胶贴,不需要对环境做人工标志或者改动,只需预先对行程路线周围自然环境中的固定物体作为AGV导航定位的参照物,通过对扫描的静止物体的轮廓进行正态分布变换的数学建模,完成AGV导航地图的建立和位姿的计算,用作激光导引AGV自然导航定位;本发明的计算复杂度为O(n),n为源扫描点集中参与计算的点数,一般仅选择扫描点数的10%‑30%即可完成SCA
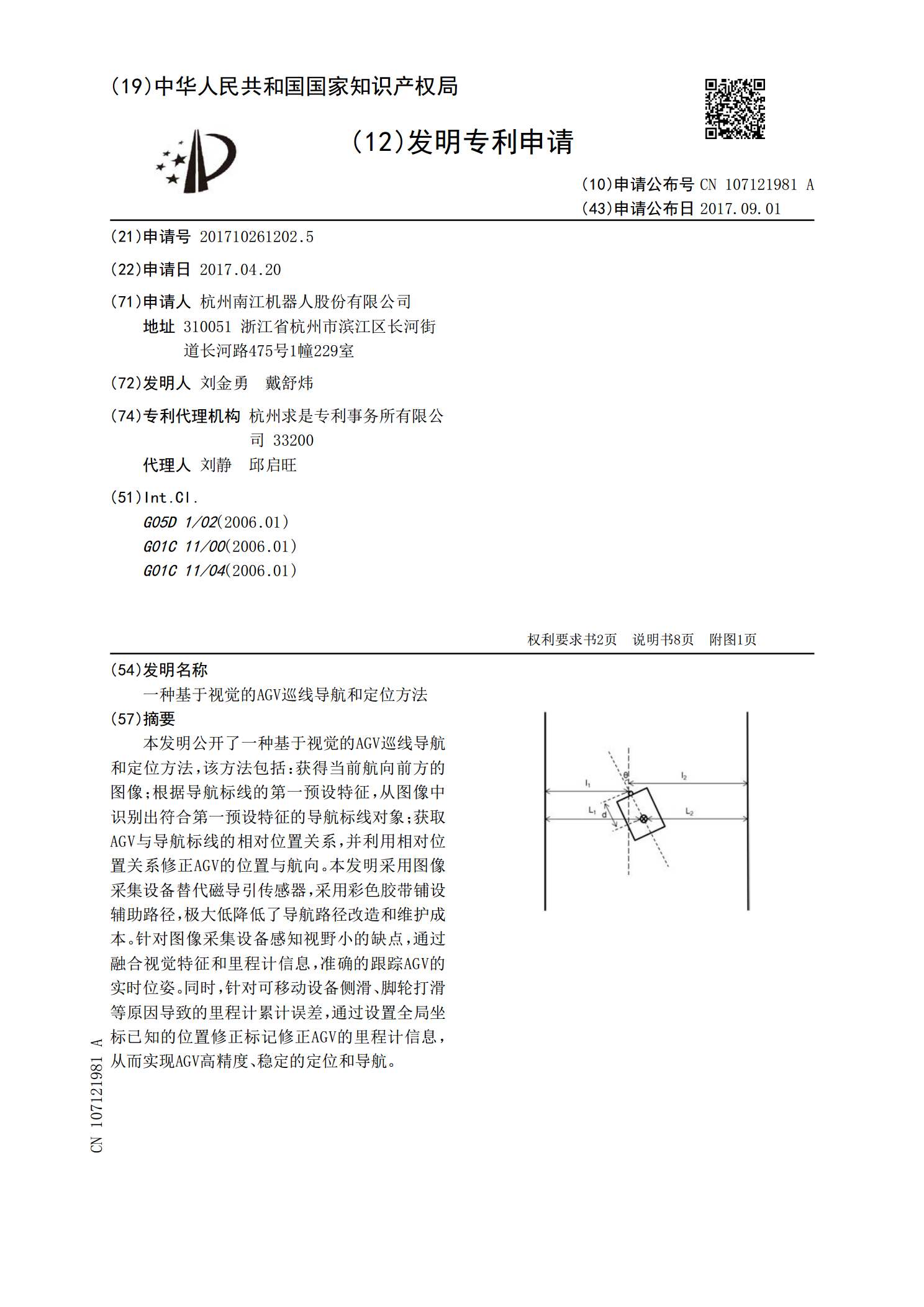
一种基于视觉的AGV巡线导航和定位方法.pdf
本发明公开了一种基于视觉的AGV巡线导航和定位方法,该方法包括:获得当前航向前方的图像;根据导航标线的第一预设特征,从图像中识别出符合第一预设特征的导航标线对象;获取AGV与导航标线的相对位置关系,并利用相对位置关系修正AGV的位置与航向。本发明采用图像采集设备替代磁导引传感器,采用彩色胶带铺设辅助路径,极大低降低了导航路径改造和维护成本。针对图像采集设备感知视野小的缺点,通过融合视觉特征和里程计信息,准确的跟踪AGV的实时位姿。同时,针对可移动设备侧滑、脚轮打滑等原因导致的里程计累计误差,通过设置全局坐