
轮式管道检测机器人异步原点位移转弯机构.pdf

一吃****天材


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮式管道检测机器人异步原点位移转弯机构.pdf
本发明提供了一种轮式管道检测机器人异步原点位移转弯机构,包括机器人本体和设置在机器人本体内的至少两套电控离合机构;其中所述机器人本体的两侧分别设有至少一个用于驱动该机器人的主动轮,每一主动轮连接一个电控离合机构以驱动所述主动轮;其中主动轮的轮轴上设有轮轴锥齿;还包括控制两个电控离合机构的电机和电磁铁的控制芯片,所述控制芯片用于在转弯时控制所述两个电磁铁通电后吸合伸缩连杆向后运动以使实现电机和减速机连接在一起以实现联动,并控制所述转弯方向内角的电机反转、外交的电机正转。

全向巡航拍摄机构及轮式管道检测机器人.pdf
本发明提供了一种全向巡航拍摄机构及轮式管道检测机器人,全向巡航拍摄机构包括底部基座、可转动的固定在基座上的用于容置摄像机构的摄像机主舱、用驱动摄像机主舱相对于基座沿竖直轴转动的竖直向电机、用于驱动摄像机构在摄像机主舱内沿水平轴转动的轴向电机。在本发明实施例中,通过升降机构、全向巡航拍摄机构来实现360°拍摄,提高管道内巡航时监控的便利性和可靠性。

管道内缺陷尺寸测量机构及轮式管道检测机器人.pdf
本发明提供了一种管道内缺陷尺寸测量机构及轮式管道检测机器人;包括摄像头,所述摄像头周边设有激光发射机构,所述激光发射机构包括至少3个等距设置的激光发射孔,且所述每一激光发射孔的激光发射方向都与摄像头的光轴平行。本发明的上述技术方案具有以下优点:本发明实施例的管道内缺陷尺寸测量机构及轮式管道检测机器人,利用激光在短距离传输发散忽略不计的特性,将多个等距的激光束投射出去以在监控画面上形成标尺。在发现破裂口、错口、淤堵块、渗漏洞时,打开激光发射装置以在监控画面上形成激光格栅,这样就可以一目了然的大致判断病害尺寸

轮式管道检测机器人.pdf
本发明公开了轮式管道检测机器人,包括固定安装在轮式行走车体上的喷料座体以及固定安装在所述轮式行走车体上的支撑座体,所述喷料座体顶部端面内设有储料箱体,所述储料箱体顶部端面内设有储料腔,所述储料腔右侧壁连通设有L型喷料管,所述L型喷料管转动配合安装在所述喷料座体右侧端面内且末端安装有喷料机构,所述L型喷料管外周的所述喷料座体内设有空腔,所述空腔内的所述L型喷料管外周固设有从动齿轮,所述储料箱体内转动配合安装有搅拌主轴,所述搅拌主轴外周固设有多组搅料页片,所述储料纤体底端的所述喷料座体内设有传动滑腔,所述搅拌
一种轮式管道检测机器人.pdf
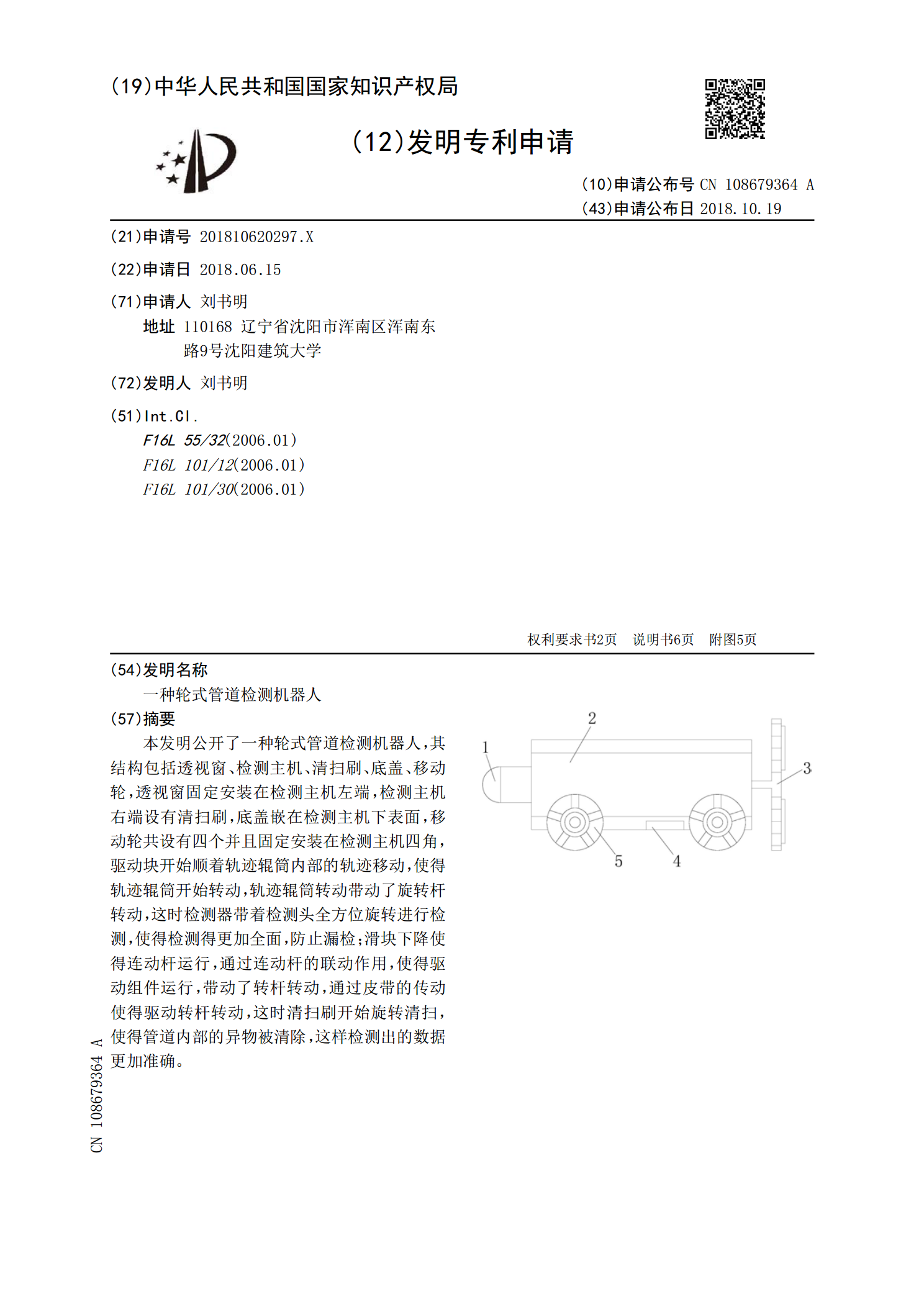
本发明公开了一种轮式管道检测机器人,其结构包括透视窗、检测主机、清扫刷、底盖、移动轮,透视窗固定安装在检测主机左端,检测主机右端设有清扫刷,底盖嵌在检测主机下表面,移动轮共设有四个并且固定安装在检测主机四角,驱动块开始顺着轨迹辊筒内部的轨迹移动,使得轨迹辊筒开始转动,轨迹辊筒转动带动了旋转杆转动,这时检测器带着检测头全方位旋转进行检测,使得检测得更加全面,防止漏检;滑块下降使得连动杆运行,通过连动杆的联动作用,使得驱动组件运行,带动了转杆转动,通过皮带的传动使得驱动转杆转动,这时清扫刷开始旋转清扫,使得管