
一种用于机器人关节的减速结构.pdf

努力****亚捷


1/6

2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于机器人关节的减速结构.pdf
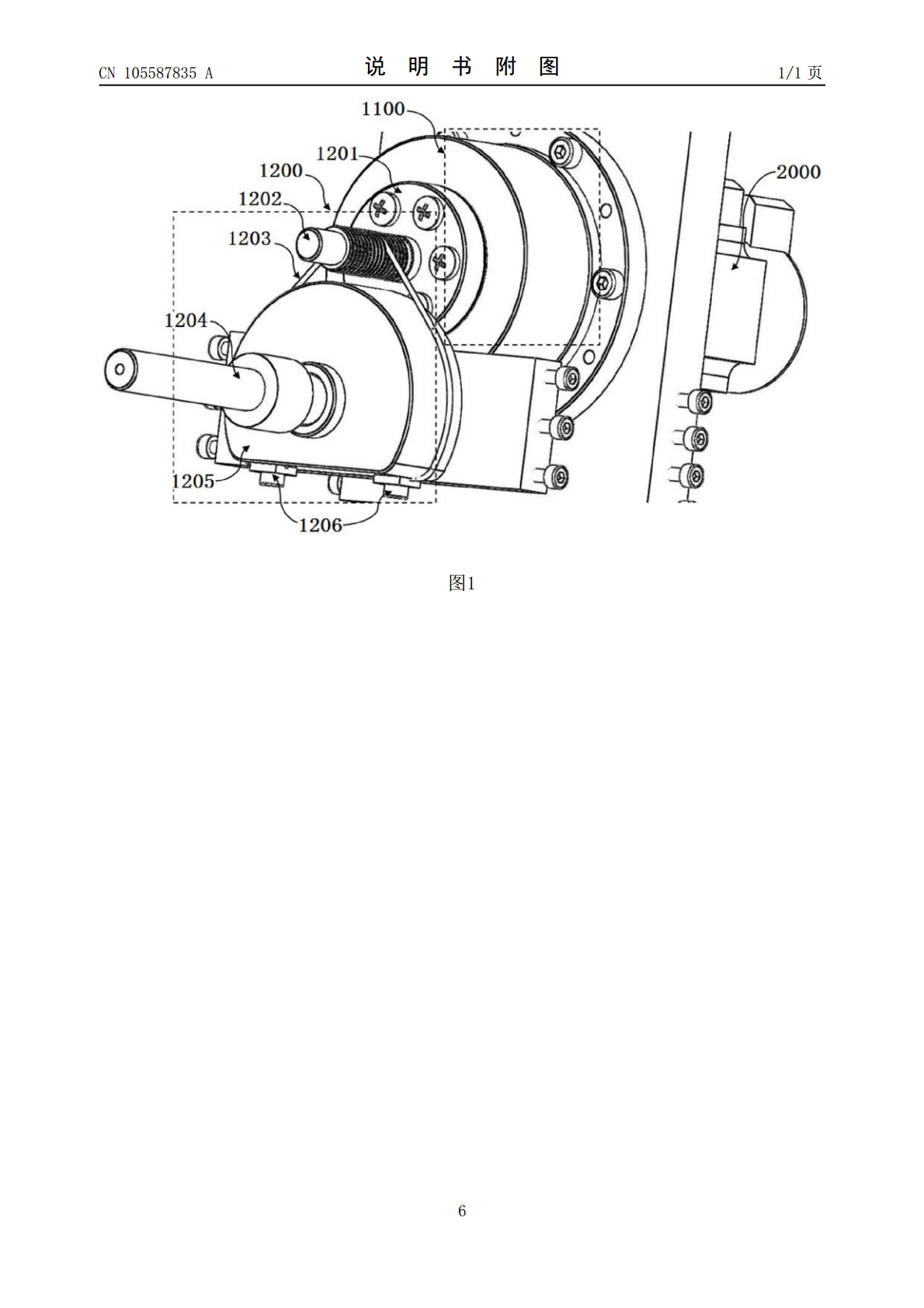
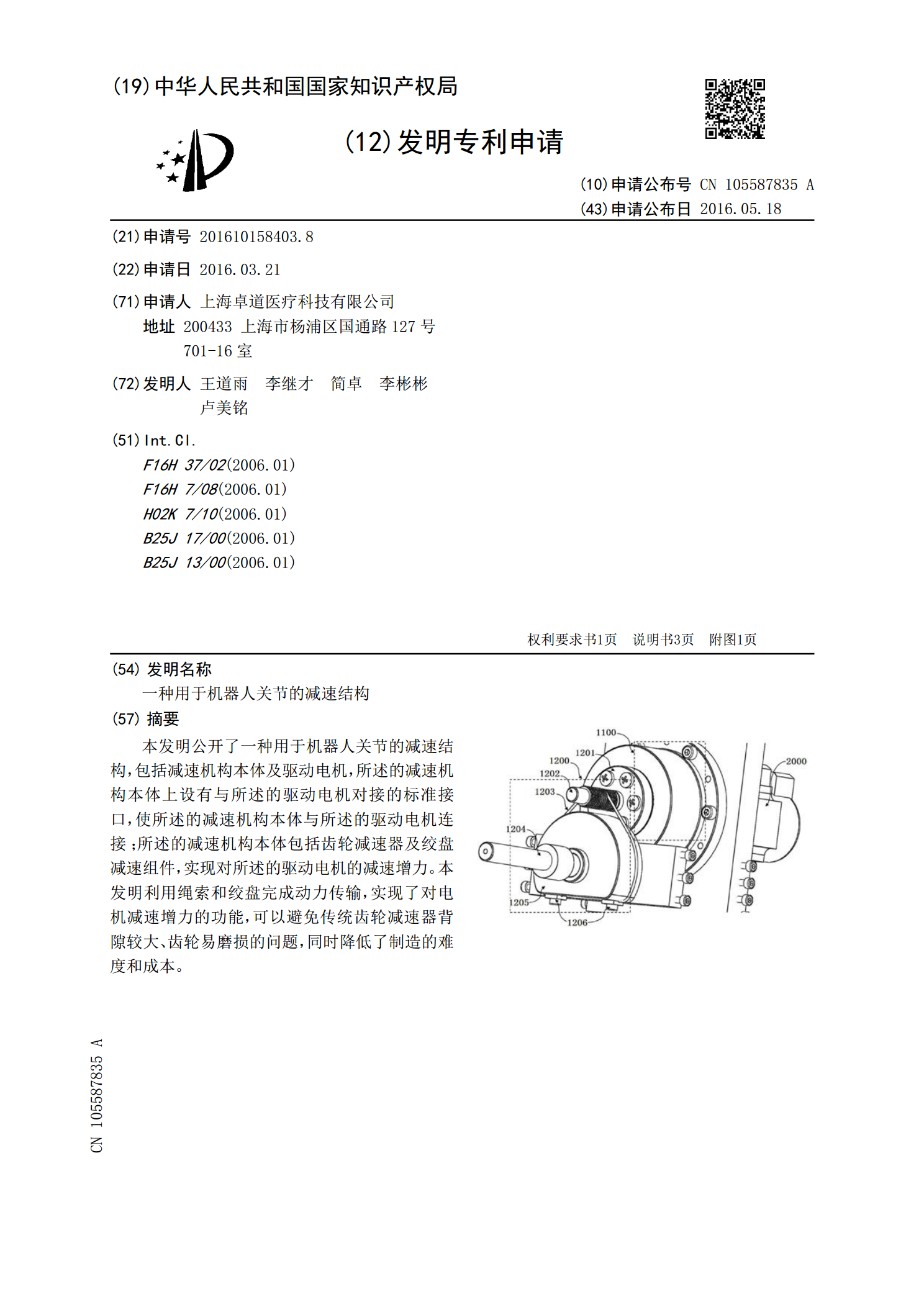
本发明公开了一种用于机器人关节的减速结构,包括减速机构本体及驱动电机,所述的减速机构本体上设有与所述的驱动电机对接的标准接口,使所述的减速机构本体与所述的驱动电机连接;所述的减速机构本体包括齿轮减速器及绞盘减速组件,实现对所述的驱动电机的减速增力。本发明利用绳索和绞盘完成动力传输,实现了对电机减速增力的功能,可以避免传统齿轮减速器背隙较大、齿轮易磨损的问题,同时降低了制造的难度和成本。
一种用于机器人减速机的轴承结构.pdf
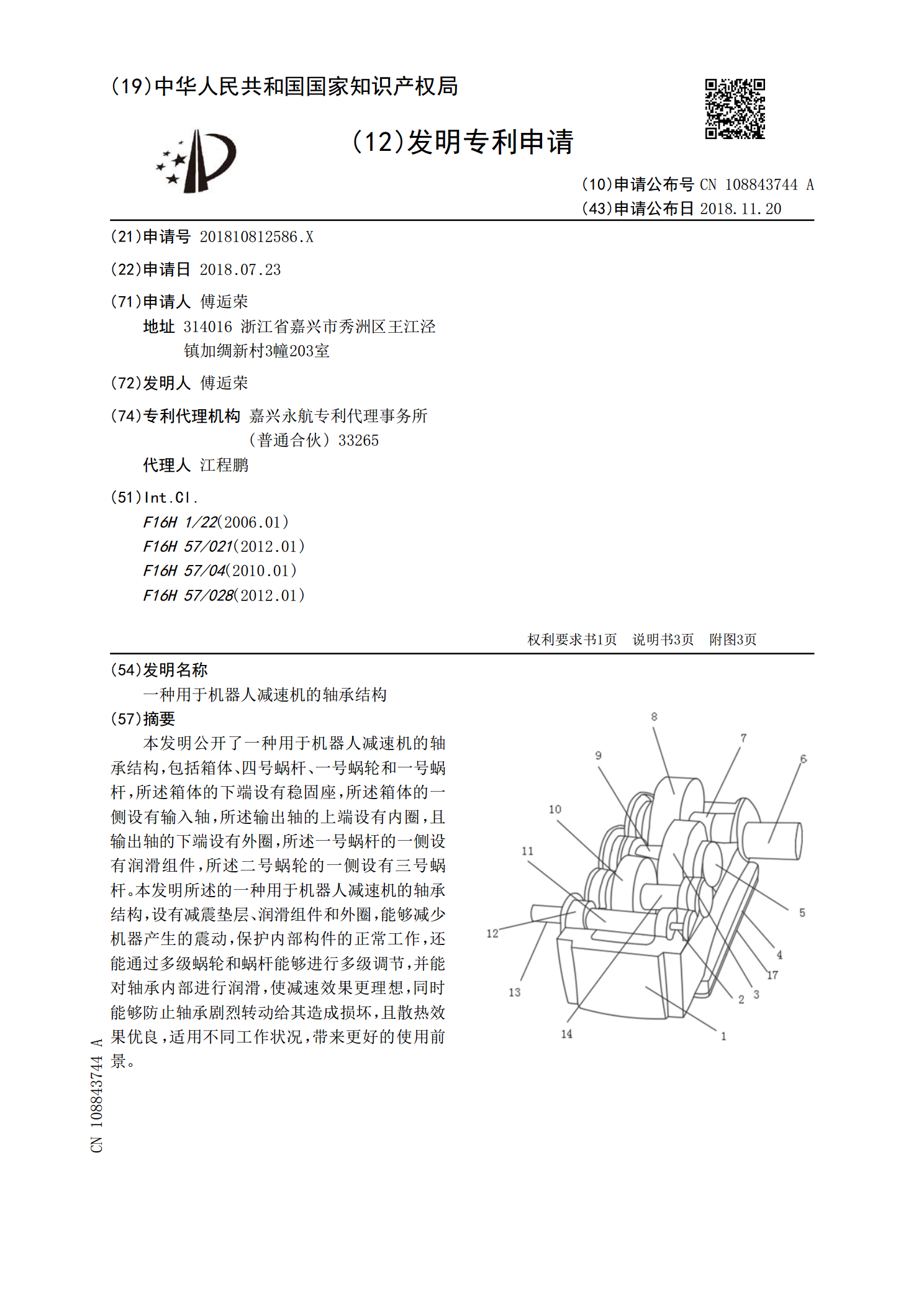
本发明公开了一种用于机器人减速机的轴承结构,包括箱体、四号蜗杆、一号蜗轮和一号蜗杆,所述箱体的下端设有稳固座,所述箱体的一侧设有输入轴,所述输出轴的上端设有内圈,且输出轴的下端设有外圈,所述一号蜗杆的一侧设有润滑组件,所述二号蜗轮的一侧设有三号蜗杆。本发明所述的一种用于机器人减速机的轴承结构,设有减震垫层、润滑组件和外圈,能够减少机器产生的震动,保护内部构件的正常工作,还能通过多级蜗轮和蜗杆能够进行多级调节,并能对轴承内部进行润滑,使减速效果更理想,同时能够防止轴承剧烈转动给其造成损坏,且散热效果优良,适

一种应用于工业机器人的关节减速器.pdf
本发明公开了一种应用于工业机器人的关节减速器,其特征是包括:中心轴、行星齿轮、行星架、端盖、输出盘、固定法兰、定位销,第一轴承,第二轴承,第三轴承,中心轴将动力传递进入减速器,中心轴与行星齿轮啮合,行星齿轮同时与端盖及输出盘的内齿圈啮合,最终,动力通过输出盘传递出去。中心轴的外侧有第一轴承、第二轴承分别与行星齿轮及输出盘相连,输出盘的外侧有第三轴承与固定法兰相连、行星齿轮轴通过滚针轴承与行星齿轮相连,端盖与固定法兰通过螺钉连接,这种减速器具有传动比范围大、结构简单紧凑、体积小、重量轻、加工成本低等优点。

一种用于工业机器人的关节结构.pdf
本发明公开了一种用于工业机器人的关节结构,包括肘壳、电机、直齿轮、中空大齿轮、中空减速机、小臂和电缆,电机安装在肘壳上,电机的输出轴上设有直齿轮,直齿轮与通过轴承支撑在肘壳上的中空大齿轮啮合,中空大齿轮与中空减速机的行星齿轮相啮合,小臂安装在中空减速机的输出轴上,所述中空减速机安装在肘壳的另一端,所述中空大齿轮和中空减速机设有同心中心孔,电缆从肘壳背面穿过该同心中心孔到达小臂处,在肘壳的穿入端和小臂处使用线卡固定。本发明的电缆可以直接从中心孔处穿过,使其结构简单,且转动空间范围大,最大能达±360度。
一种单电机双减速机机器人关节结构.pdf
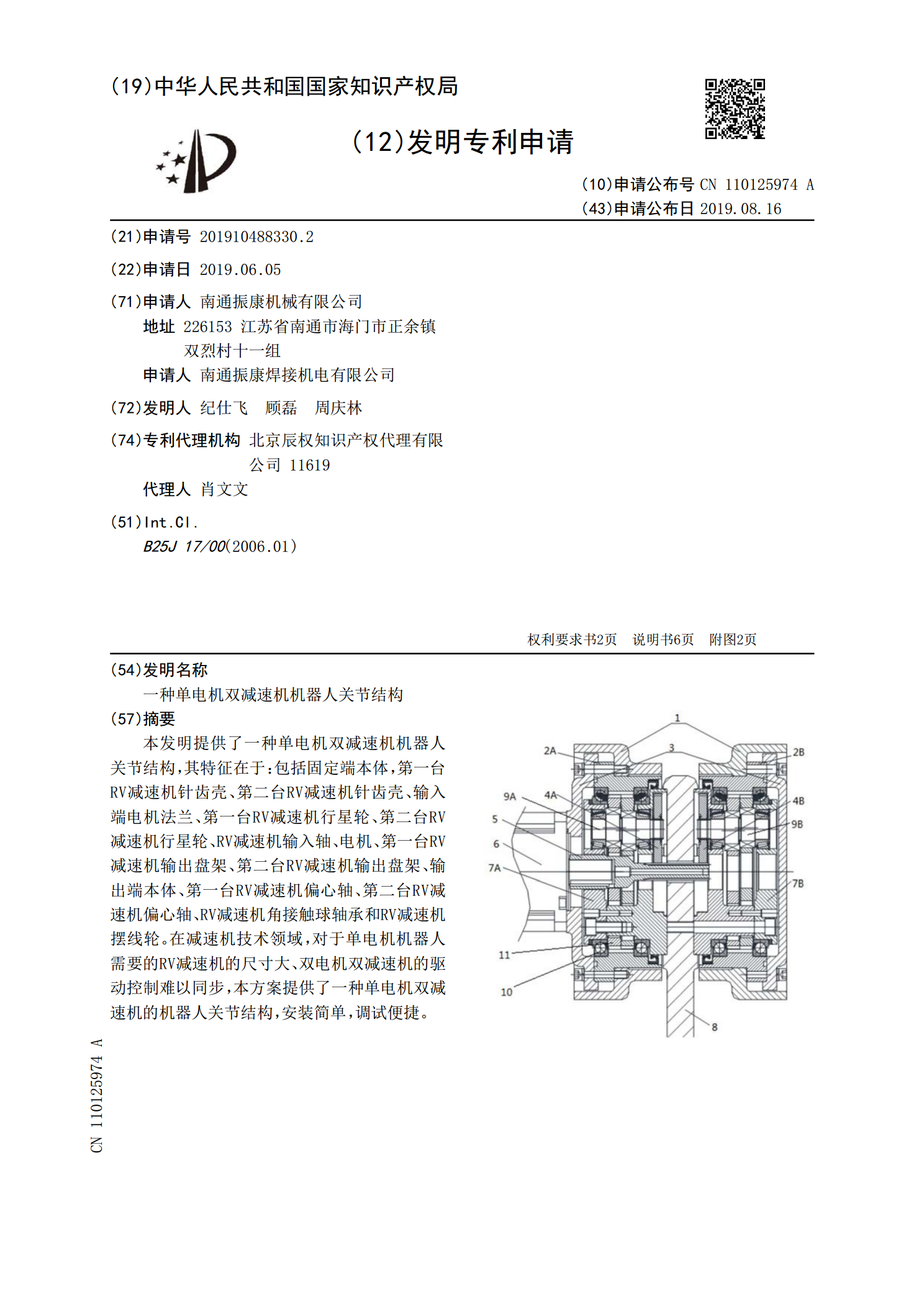
本发明提供了一种单电机双减速机机器人关节结构,其特征在于:包括固定端本体,第一台RV减速机针齿壳、第二台RV减速机针齿壳、输入端电机法兰、第一台RV减速机行星轮、第二台RV减速机行星轮、RV减速机输入轴、电机、第一台RV减速机输出盘架、第二台RV减速机输出盘架、输出端本体、第一台RV减速机偏心轴、第二台RV减速机偏心轴、RV减速机角接触球轴承和RV减速机摆线轮。在减速机技术领域,对于单电机机器人需要的RV减速机的尺寸大、双电机双减速机的驱动控制难以同步,本方案提供了一种单电机双减速机的机器人关节结构,安装