
一种单电机双减速机机器人关节结构.pdf

一条****贺6

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种单电机双减速机机器人关节结构.pdf
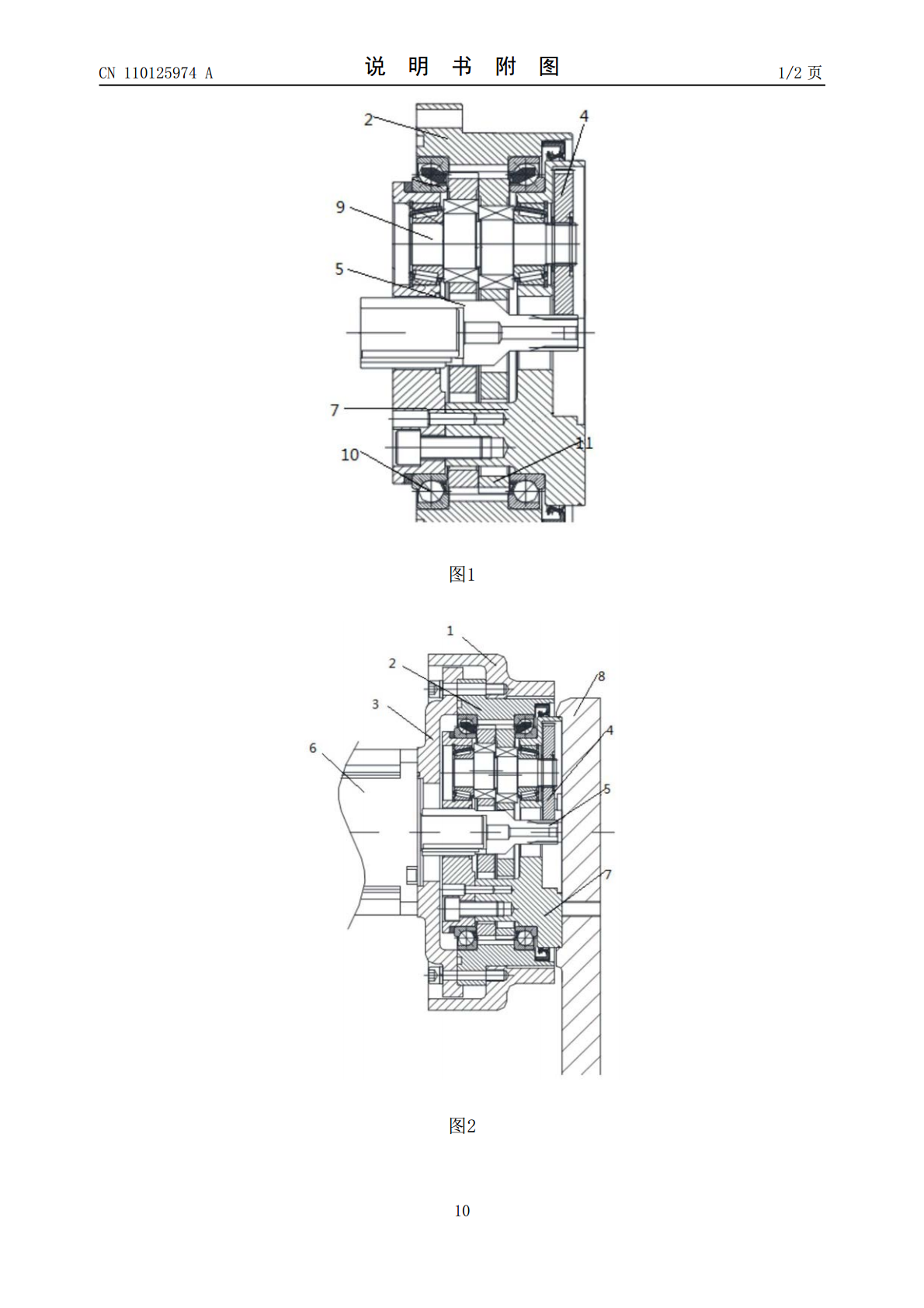
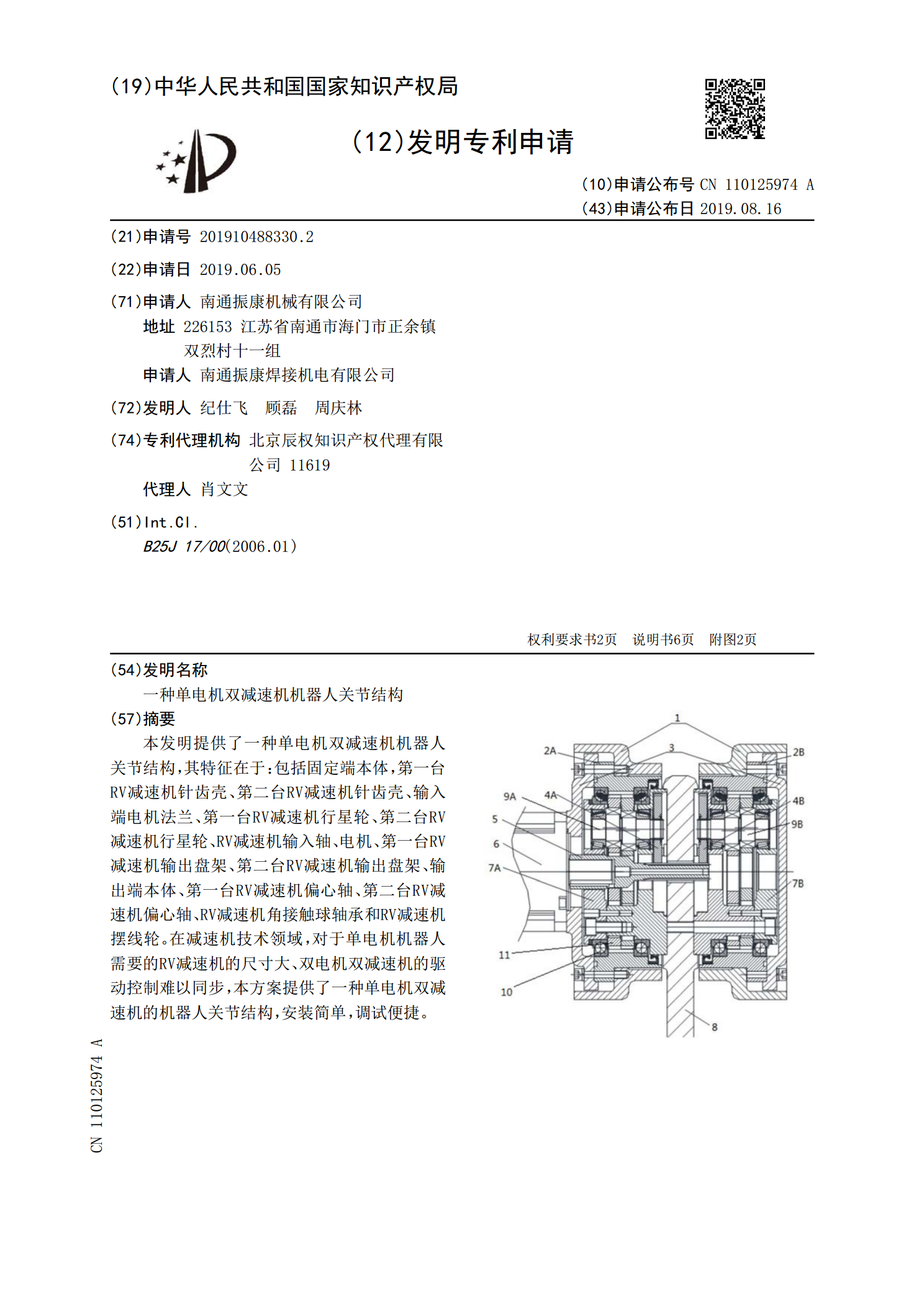
本发明提供了一种单电机双减速机机器人关节结构,其特征在于:包括固定端本体,第一台RV减速机针齿壳、第二台RV减速机针齿壳、输入端电机法兰、第一台RV减速机行星轮、第二台RV减速机行星轮、RV减速机输入轴、电机、第一台RV减速机输出盘架、第二台RV减速机输出盘架、输出端本体、第一台RV减速机偏心轴、第二台RV减速机偏心轴、RV减速机角接触球轴承和RV减速机摆线轮。在减速机技术领域,对于单电机机器人需要的RV减速机的尺寸大、双电机双减速机的驱动控制难以同步,本方案提供了一种单电机双减速机的机器人关节结构,安装

一种单电机双足机器人.pdf
本发明公开了一种单电机双足机器人,包括机身,以及分别竖直设置在机身左、右方的腿板,机身前侧板面安装有双头直流减速电机,双头直流减速电机每个输出轴轴端分别共中心轴固定安装有转轮,每个转轮分别通过偏心转轴与对应侧腿板偏心转动连接,每个腿板顶部分别竖直向下设有长槽,机身前侧板面上部转动安装有中心轴沿左右水平方向的主轴,主轴左、右端分别穿过对应侧腿板的长槽,且主轴轴端与所在长槽相对转动及滑动配合,机身后侧板面设有控制盒、电池盒,其中控制盒内设有减速电机电路,电池盒内供电电池通过减速电机电路供电至双头直流减速电机。
一种双驱动式工业机器人关节结构.pdf
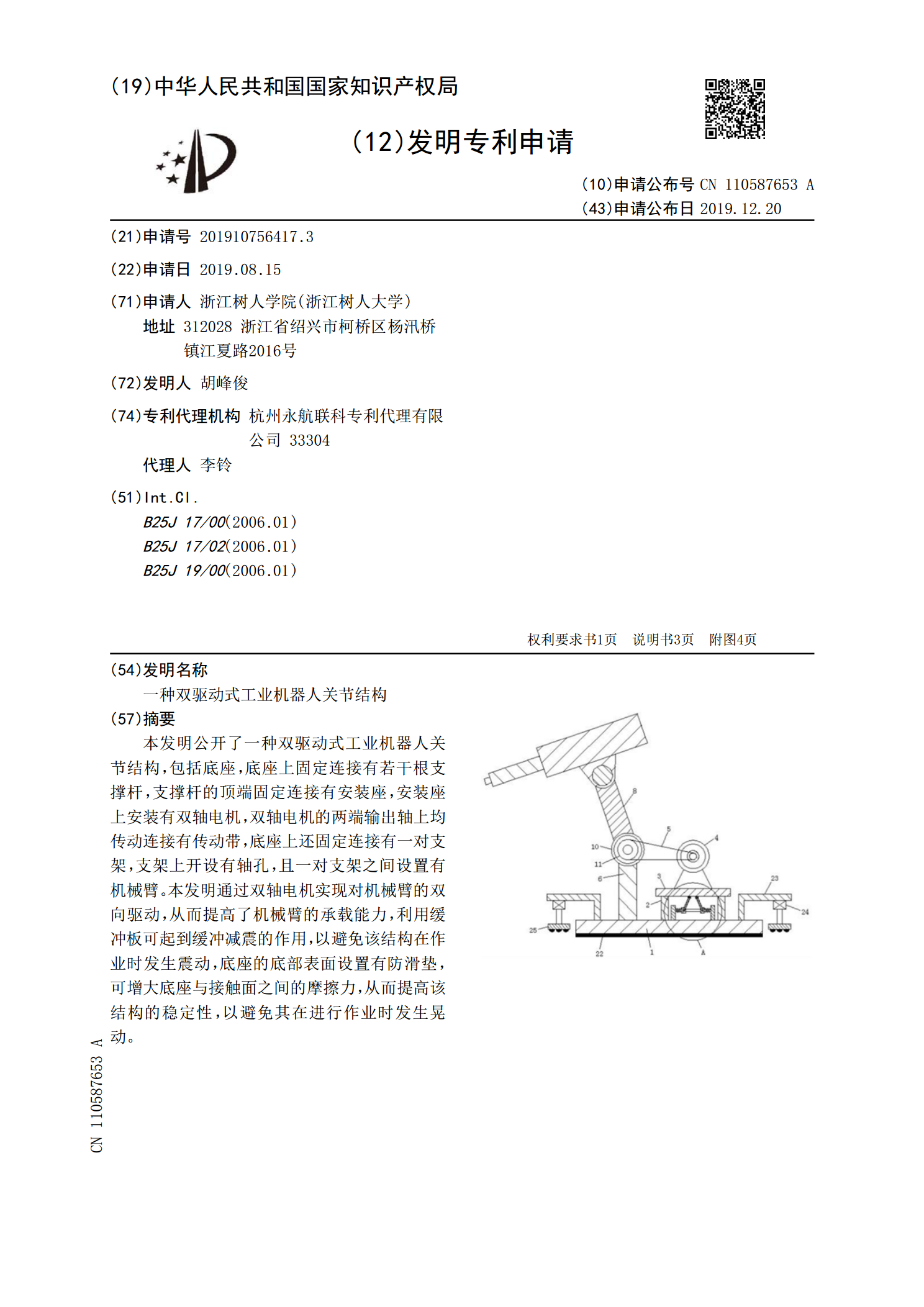
本发明公开了一种双驱动式工业机器人关节结构,包括底座,底座上固定连接有若干根支撑杆,支撑杆的顶端固定连接有安装座,安装座上安装有双轴电机,双轴电机的两端输出轴上均传动连接有传动带,底座上还固定连接有一对支架,支架上开设有轴孔,且一对支架之间设置有机械臂。本发明通过双轴电机实现对机械臂的双向驱动,从而提高了机械臂的承载能力,利用缓冲板可起到缓冲减震的作用,以避免该结构在作业时发生震动,底座的底部表面设置有防滑垫,可增大底座与接触面之间的摩擦力,从而提高该结构的稳定性,以避免其在进行作业时发生晃动。
一种机器人手臂关节用磁场调制电机磁路结构.pdf
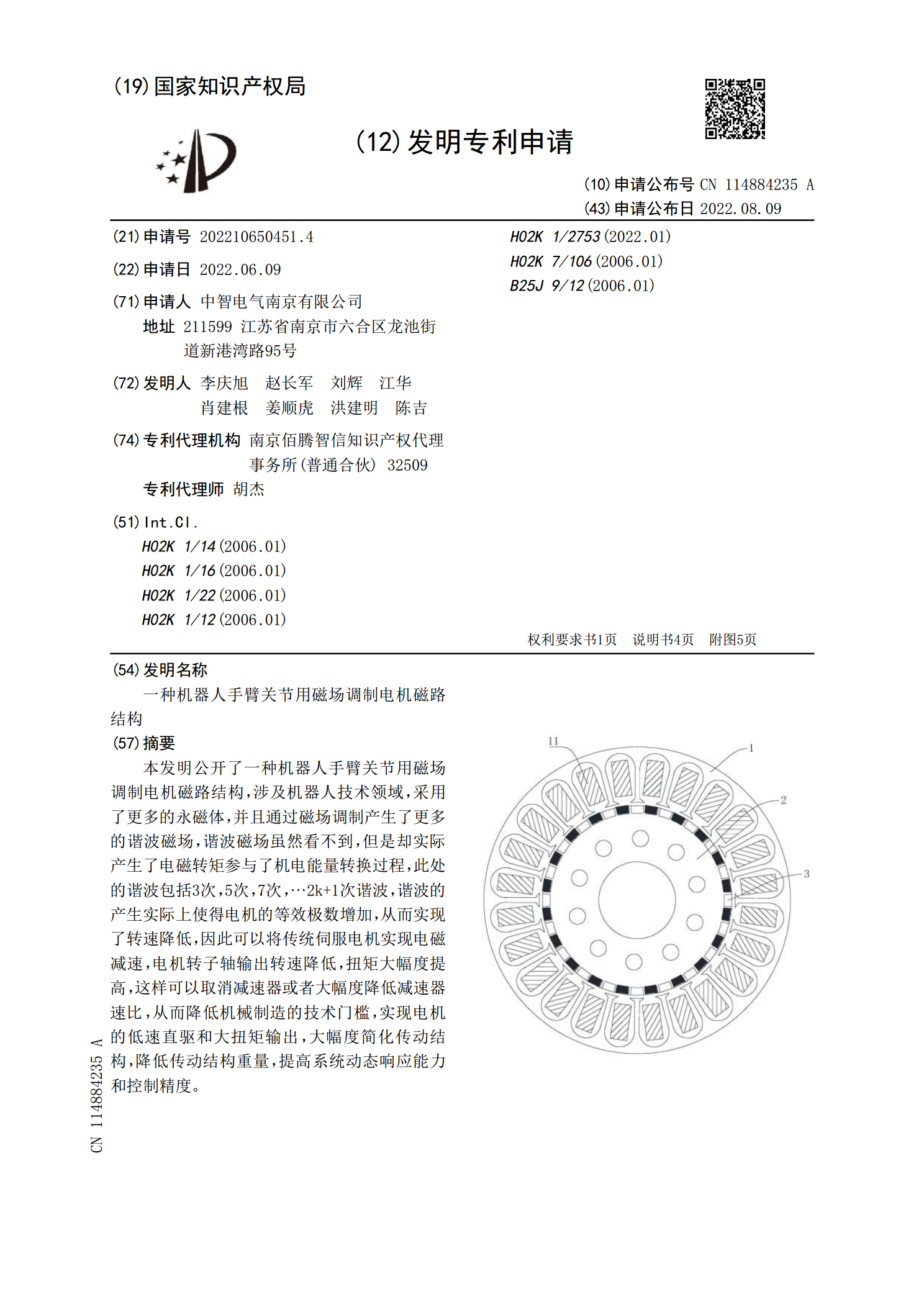
本发明公开了一种机器人手臂关节用磁场调制电机磁路结构,涉及机器人技术领域,采用了更多的永磁体,并且通过磁场调制产生了更多的谐波磁场,谐波磁场虽然看不到,但是却实际产生了电磁转矩参与了机电能量转换过程,此处的谐波包括3次,5次,7次,…2k+1次谐波,谐波的产生实际上使得电机的等效极数增加,从而实现了转速降低,因此可以将传统伺服电机实现电磁减速,电机转子轴输出转速降低,扭矩大幅度提高,这样可以取消减速器或者大幅度降低减速器速比,从而降低机械制造的技术门槛,实现电机的低速直驱和大扭矩输出,大幅度简化传动结构,
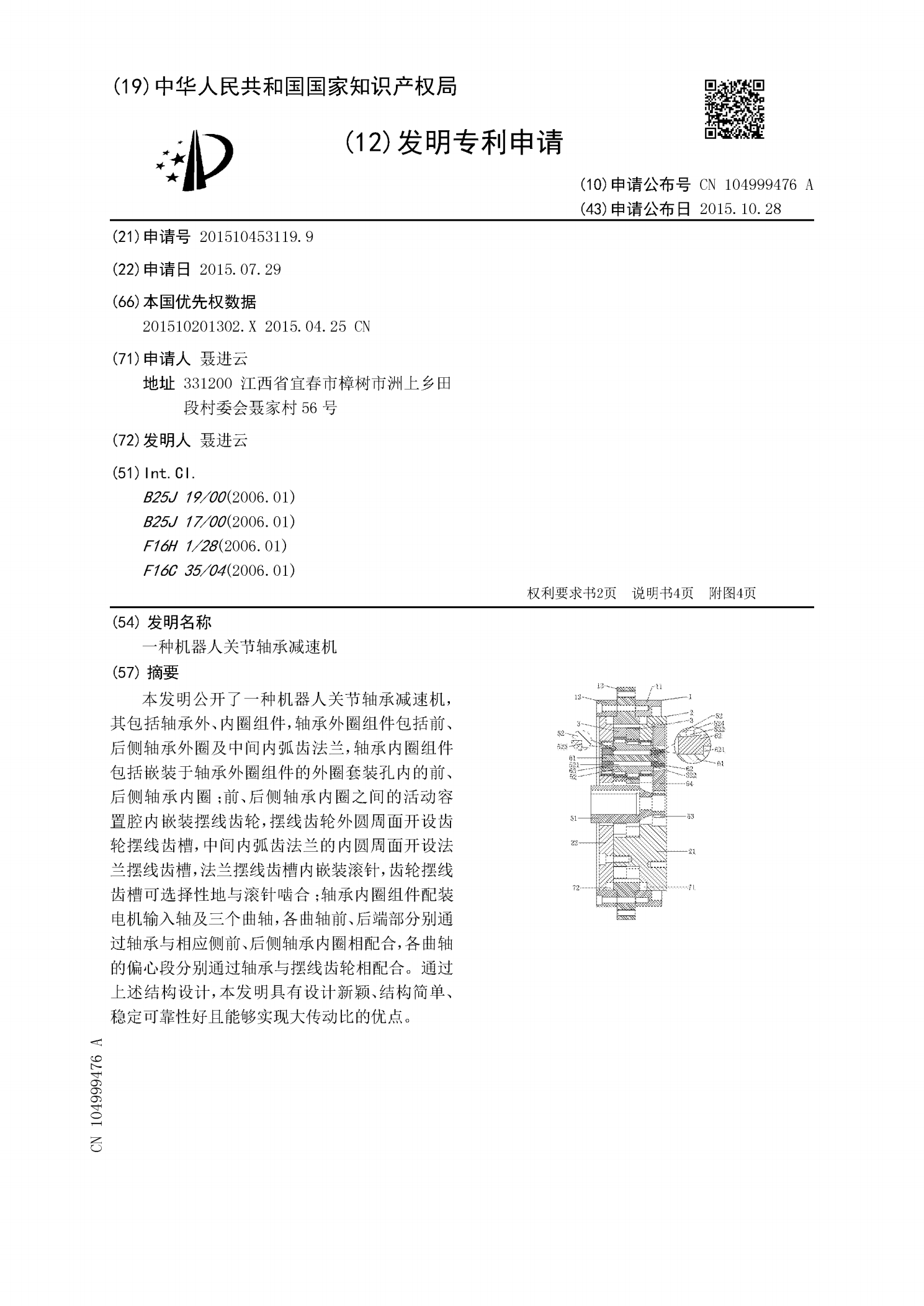
一种机器人关节轴承减速机.pdf
本发明公开了一种机器人关节轴承减速机,其包括轴承外、内圈组件,轴承外圈组件包括前、后侧轴承外圈及中间内弧齿法兰,轴承内圈组件包括嵌装于轴承外圈组件的外圈套装孔内的前、后侧轴承内圈;前、后侧轴承内圈之间的活动容置腔内嵌装摆线齿轮,摆线齿轮外圆周面开设齿轮摆线齿槽,中间内弧齿法兰的内圆周面开设法兰摆线齿槽,法兰摆线齿槽内嵌装滚针,齿轮摆线齿槽可选择性地与滚针啮合;轴承内圈组件配装电机输入轴及三个曲轴,各曲轴前、后端部分别通过轴承与相应侧前、后侧轴承内圈相配合,各曲轴的偏心段分别通过轴承与摆线齿轮相配合。通过上