
一种水下船体清扫机器人用磁轮吸附行走机构.pdf

涵蓄****09

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水下船体清扫机器人用磁轮吸附行走机构.pdf
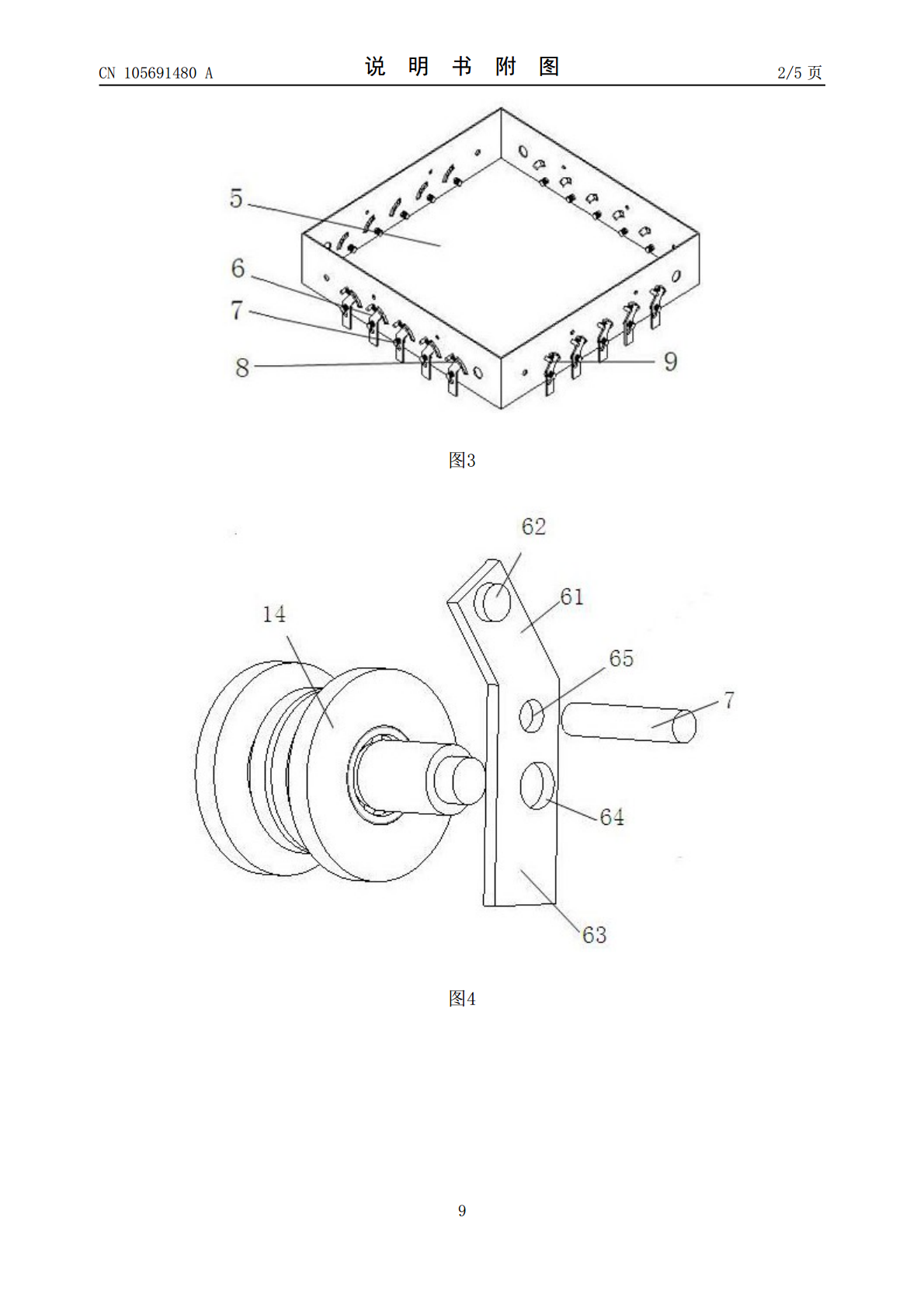
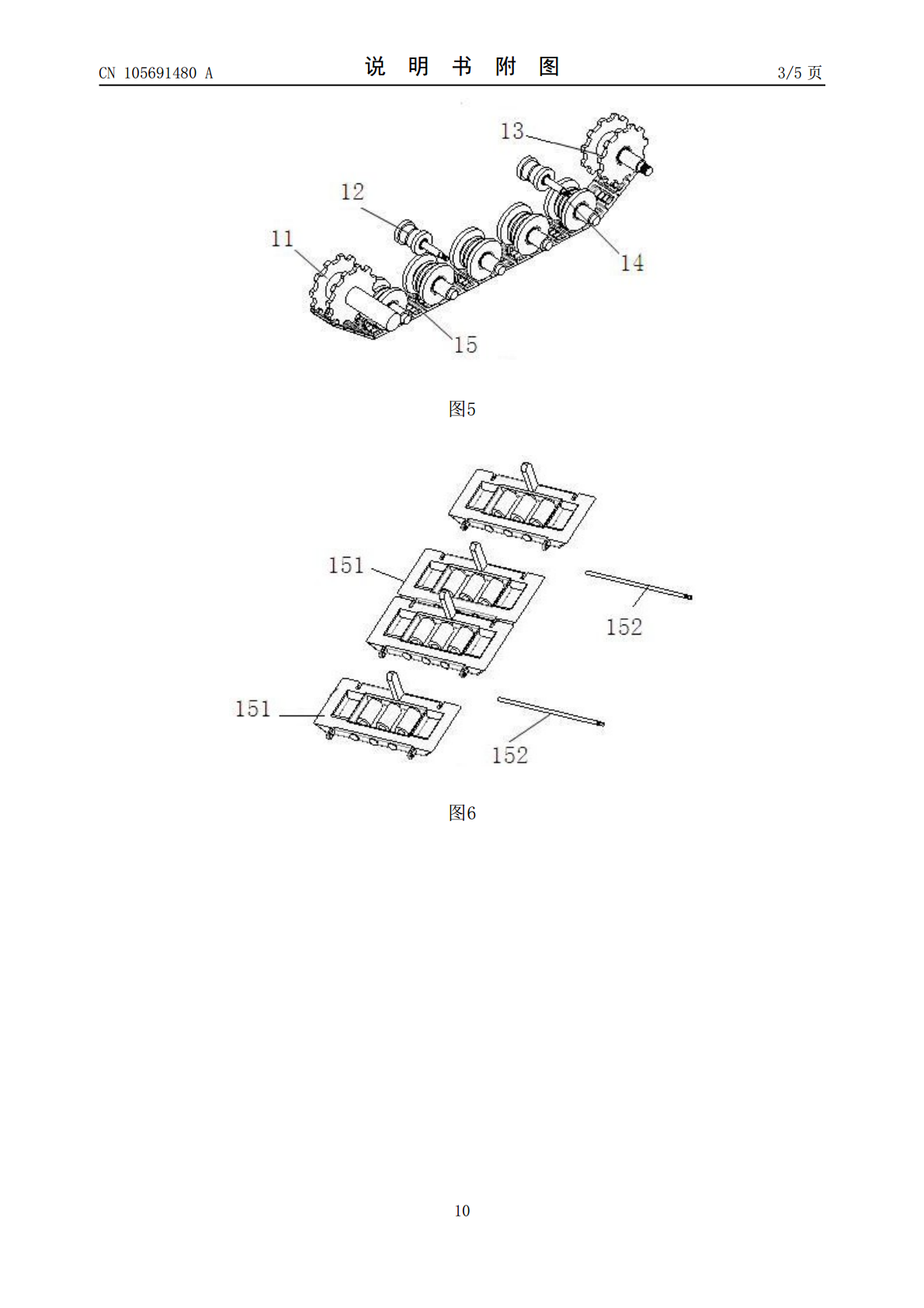
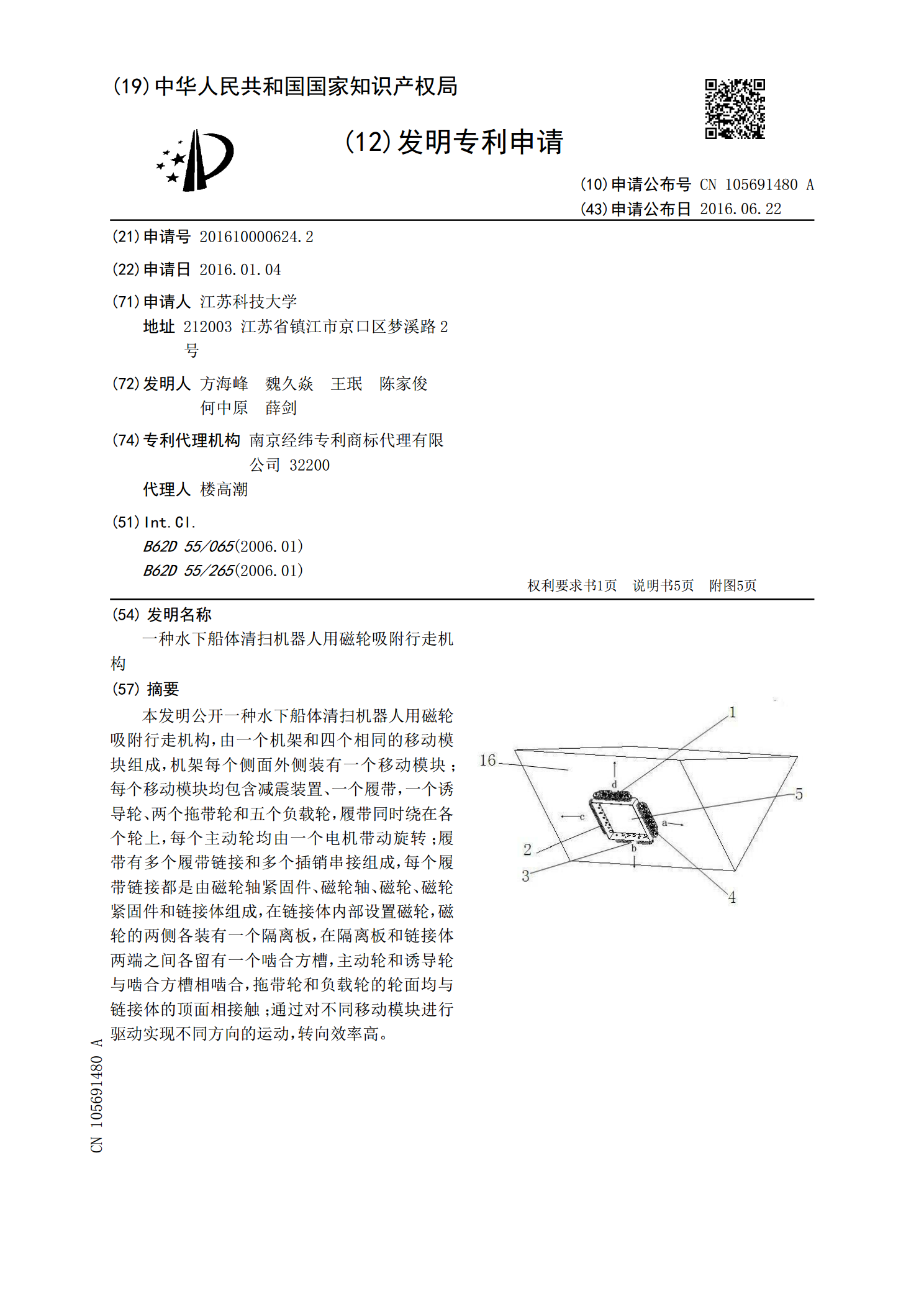
本发明公开一种水下船体清扫机器人用磁轮吸附行走机构,由一个机架和四个相同的移动模块组成,机架每个侧面外侧装有一个移动模块;每个移动模块均包含减震装置、一个履带,一个诱导轮、两个拖带轮和五个负载轮,履带同时绕在各个轮上,每个主动轮均由一个电机带动旋转;履带有多个履带链接和多个插销串接组成,每个履带链接都是由磁轮轴紧固件、磁轮轴、磁轮、磁轮紧固件和链接体组成,在链接体内部设置磁轮,磁轮的两侧各装有一个隔离板,在隔离板和链接体两端之间各留有一个啮合方槽,主动轮和诱导轮与啮合方槽相啮合,拖带轮和负载轮的轮面均与链
用于水下磁吸附轮履式爬行机器人磁吸附单元.pdf
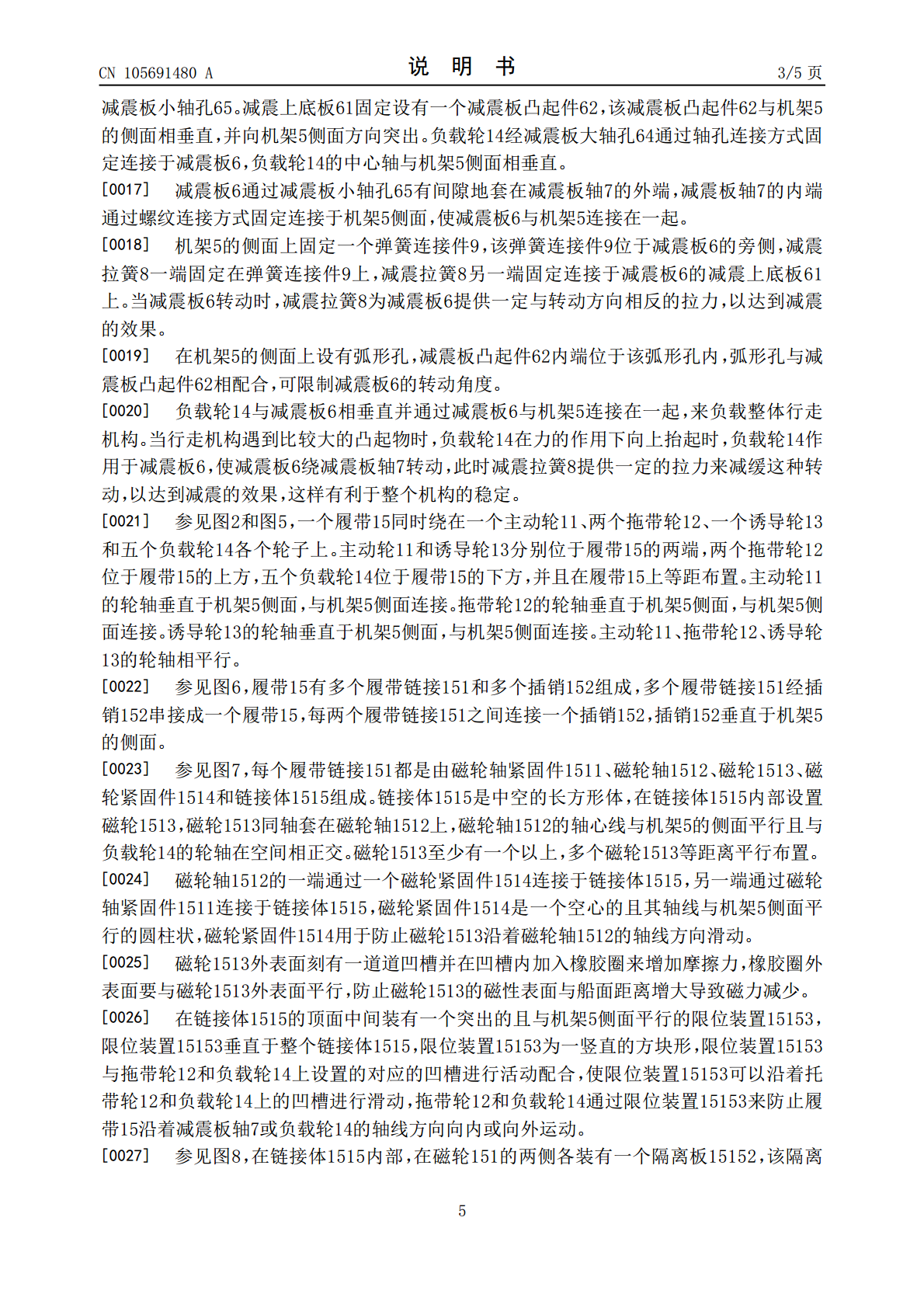
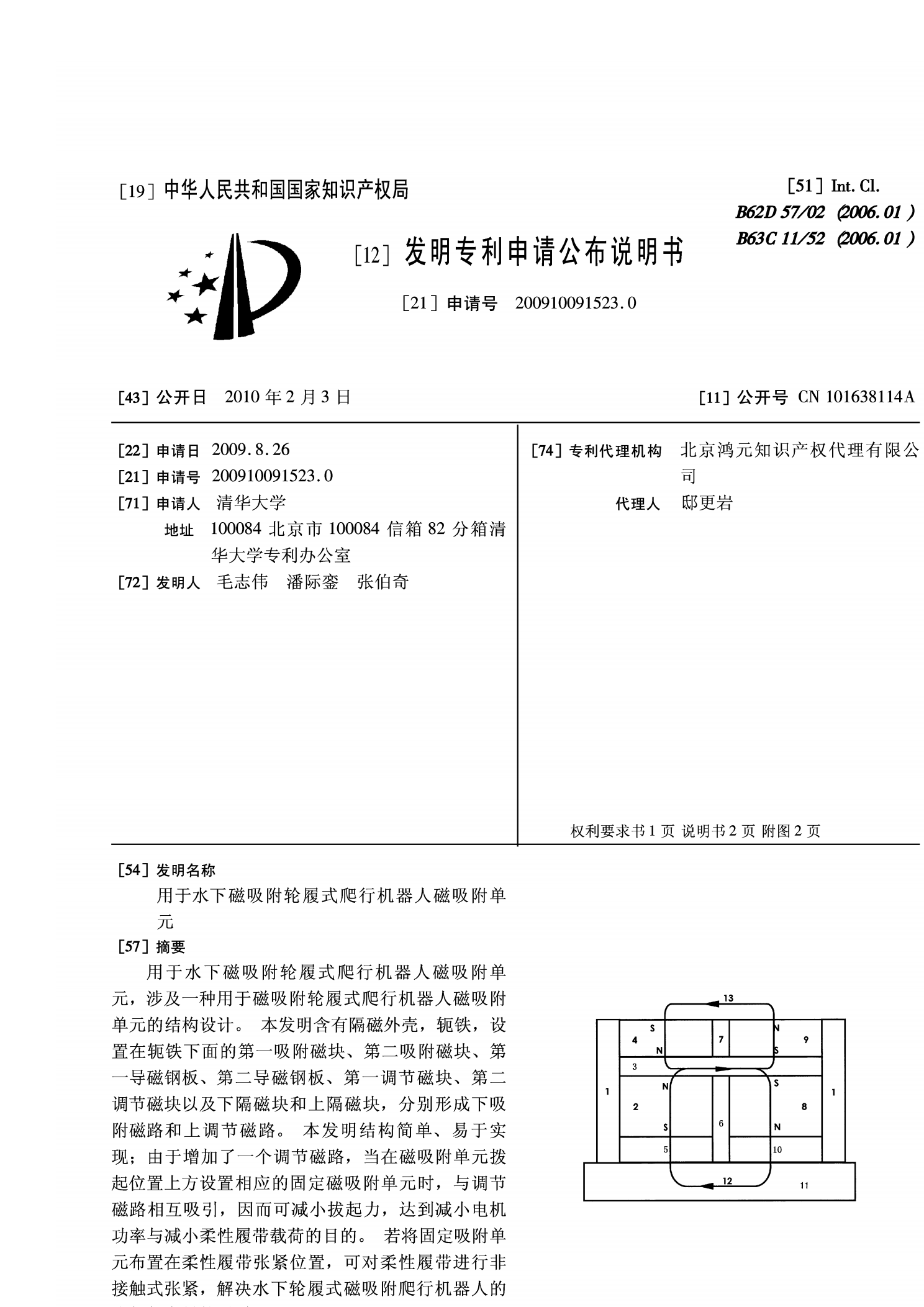
用于水下磁吸附轮履式爬行机器人磁吸附单元,涉及一种用于磁吸附轮履式爬行机器人磁吸附单元的结构设计。本发明含有隔磁外壳,轭铁,设置在轭铁下面的第一吸附磁块、第二吸附磁块、第一导磁钢板、第二导磁钢板、第一调节磁块、第二调节磁块以及下隔磁块和上隔磁块,分别形成下吸附磁路和上调节磁路。本发明结构简单、易于实现;由于增加了一个调节磁路,当在磁吸附单元拨起位置上方设置相应的固定磁吸附单元时,与调节磁路相互吸引,因而可减小拔起力,达到减小电机功率与减小柔性履带载荷的目的。若将固定吸附单元布置在柔性履带张紧位置
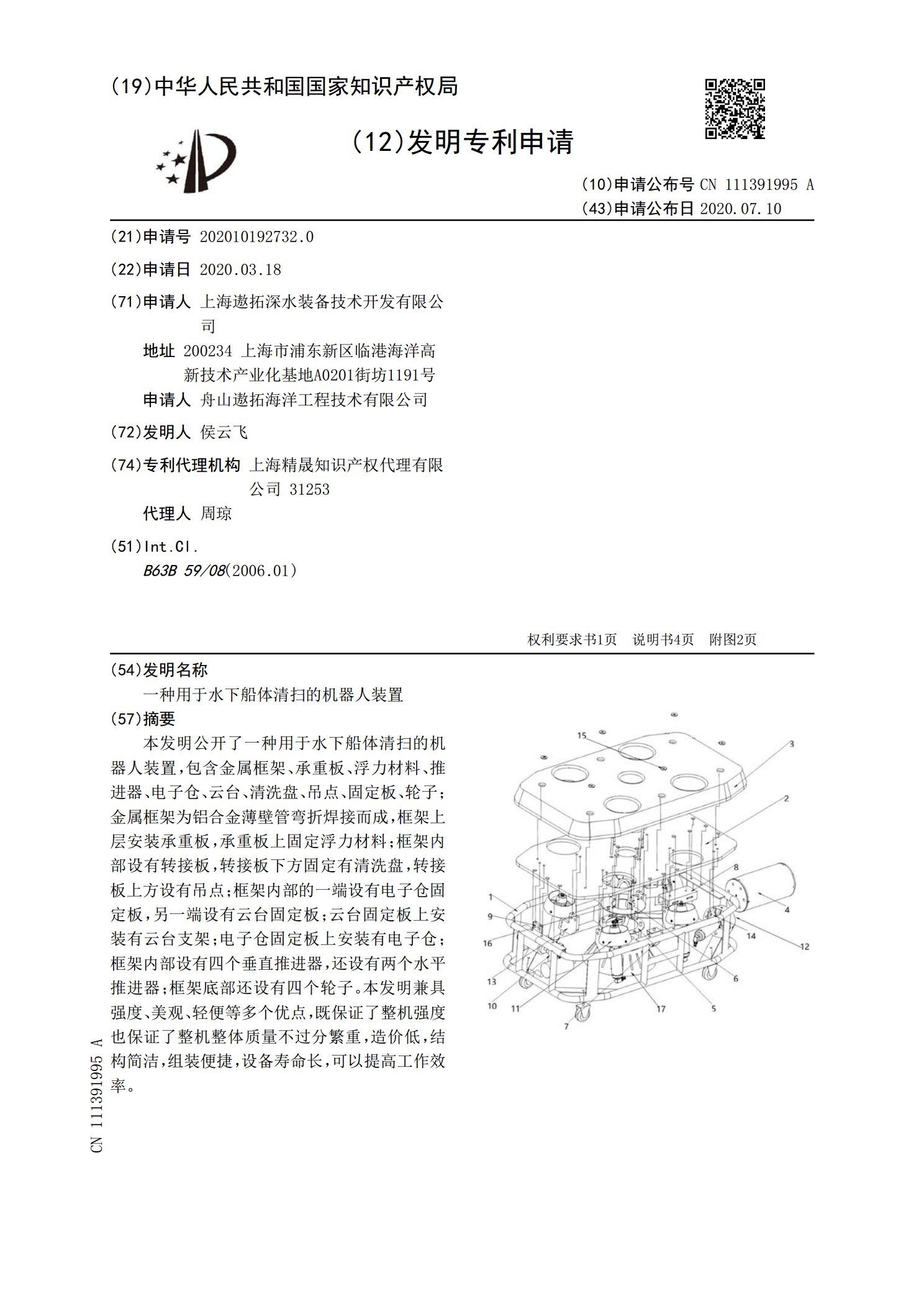
一种用于水下船体清扫的机器人装置.pdf
本发明公开了一种用于水下船体清扫的机器人装置,包含金属框架、承重板、浮力材料、推进器、电子仓、云台、清洗盘、吊点、固定板、轮子;金属框架为铝合金薄壁管弯折焊接而成,框架上层安装承重板,承重板上固定浮力材料;框架内部设有转接板,转接板下方固定有清洗盘,转接板上方设有吊点;框架内部的一端设有电子仓固定板,另一端设有云台固定板;云台固定板上安装有云台支架;电子仓固定板上安装有电子仓;框架内部设有四个垂直推进器,还设有两个水平推进器;框架底部还设有四个轮子。本发明兼具强度、美观、轻便等多个优点,既保证了整机强度也
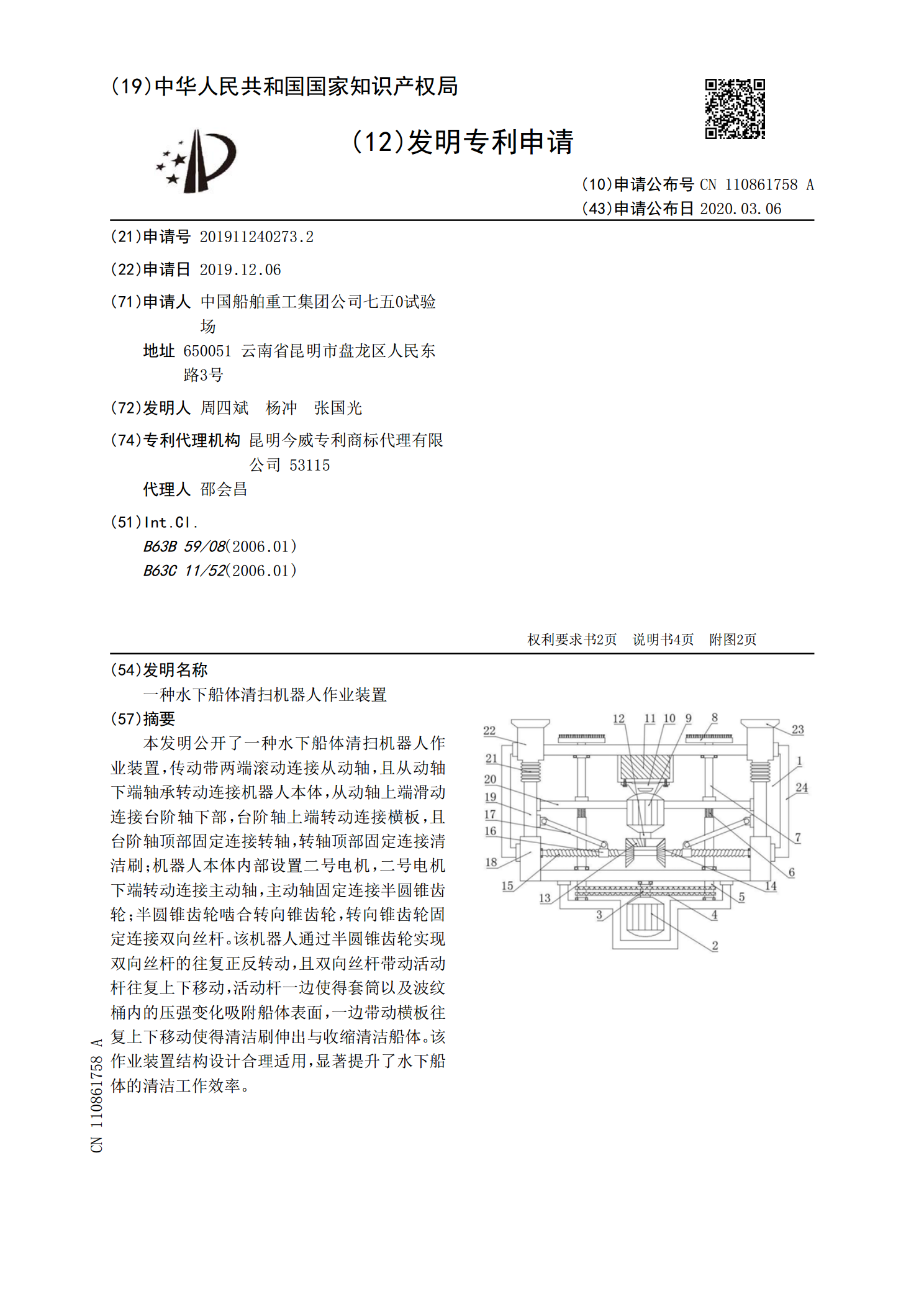
一种水下船体清扫机器人作业装置.pdf
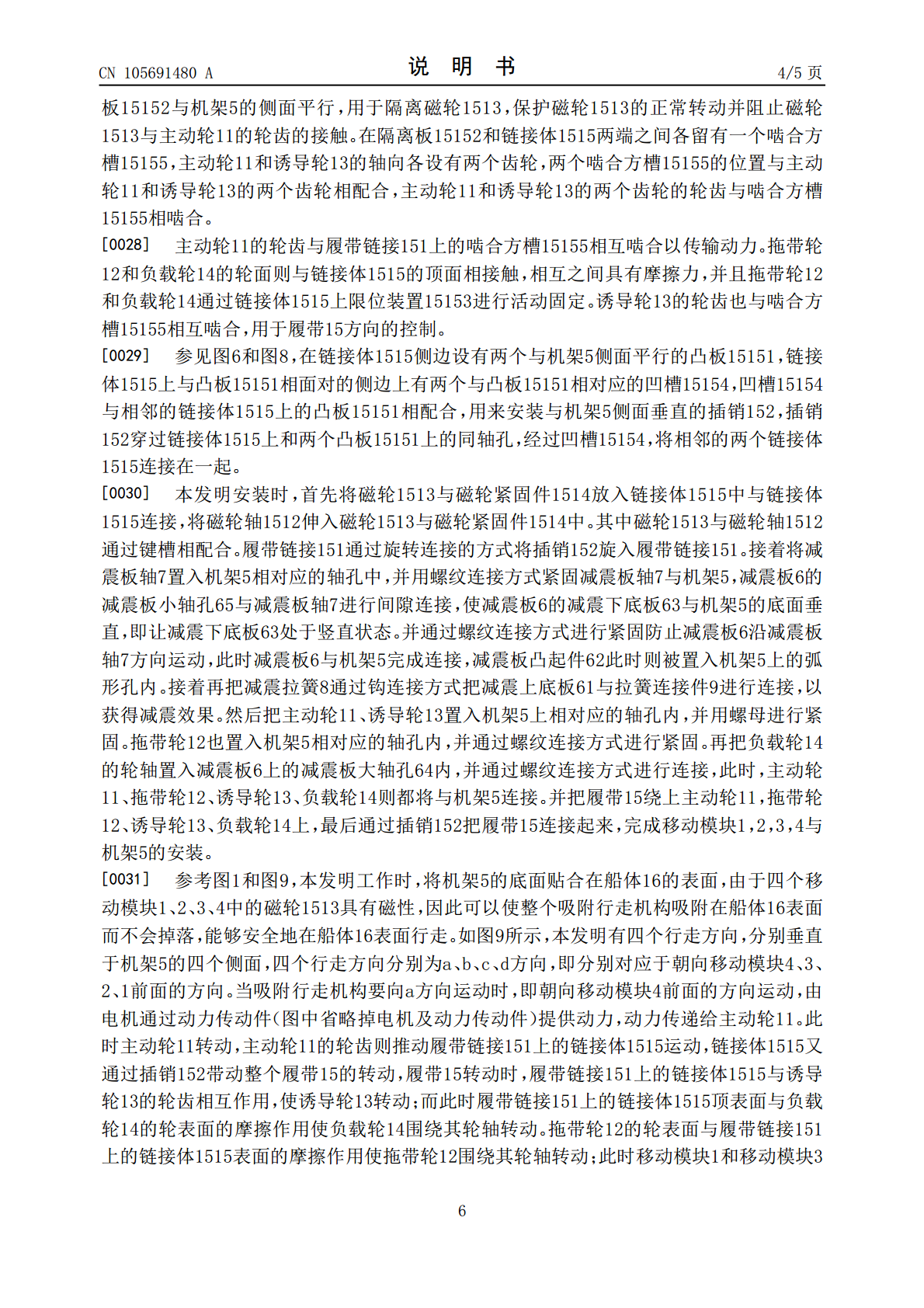
本发明公开了一种水下船体清扫机器人作业装置,传动带两端滚动连接从动轴,且从动轴下端轴承转动连接机器人本体,从动轴上端滑动连接台阶轴下部,台阶轴上端转动连接横板,且台阶轴顶部固定连接转轴,转轴顶部固定连接清洁刷;机器人本体内部设置二号电机,二号电机下端转动连接主动轴,主动轴固定连接半圆锥齿轮;半圆锥齿轮啮合转向锥齿轮,转向锥齿轮固定连接双向丝杆。该机器人通过半圆锥齿轮实现双向丝杆的往复正反转动,且双向丝杆带动活动杆往复上下移动,活动杆一边使得套筒以及波纹桶内的压强变化吸附船体表面,一边带动横板往复上下移动使
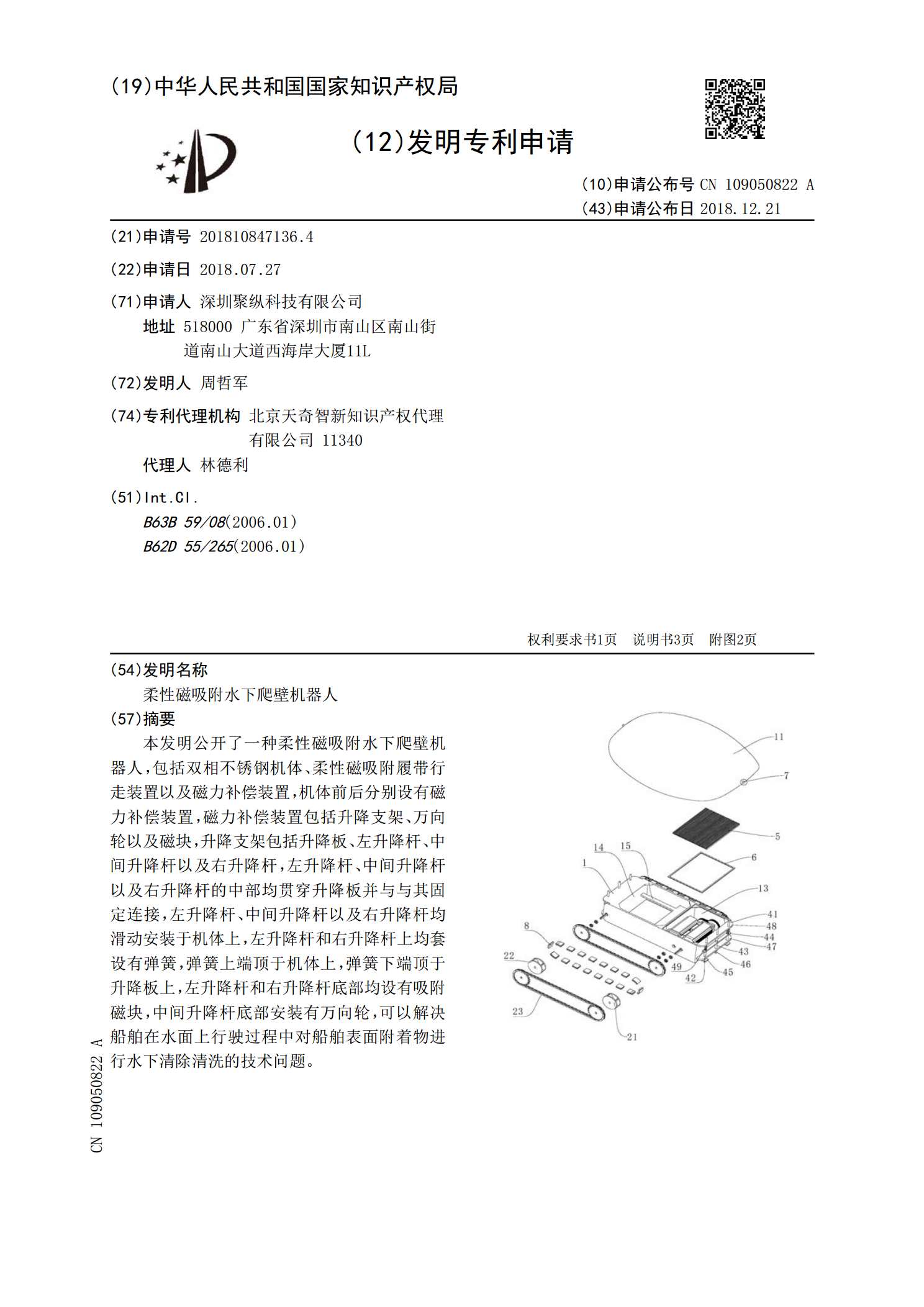
柔性磁吸附水下爬壁机器人.pdf
本发明公开了一种柔性磁吸附水下爬壁机器人,包括双相不锈钢机体、柔性磁吸附履带行走装置以及磁力补偿装置,机体前后分别设有磁力补偿装置,磁力补偿装置包括升降支架、万向轮以及磁块,升降支架包括升降板、左升降杆、中间升降杆以及右升降杆,左升降杆、中间升降杆以及右升降杆的中部均贯穿升降板并与与其固定连接,左升降杆、中间升降杆以及右升降杆均滑动安装于机体上,左升降杆和右升降杆上均套设有弹簧,弹簧上端顶于机体上,弹簧下端顶于升降板上,左升降杆和右升降杆底部均设有吸附磁块,中间升降杆底部安装有万向轮,可以解决船舶在水面上