
一种四轮轮毂电动汽车防滑控制方法.pdf

纪阳****公主

1/10

2/10
3/10

4/10

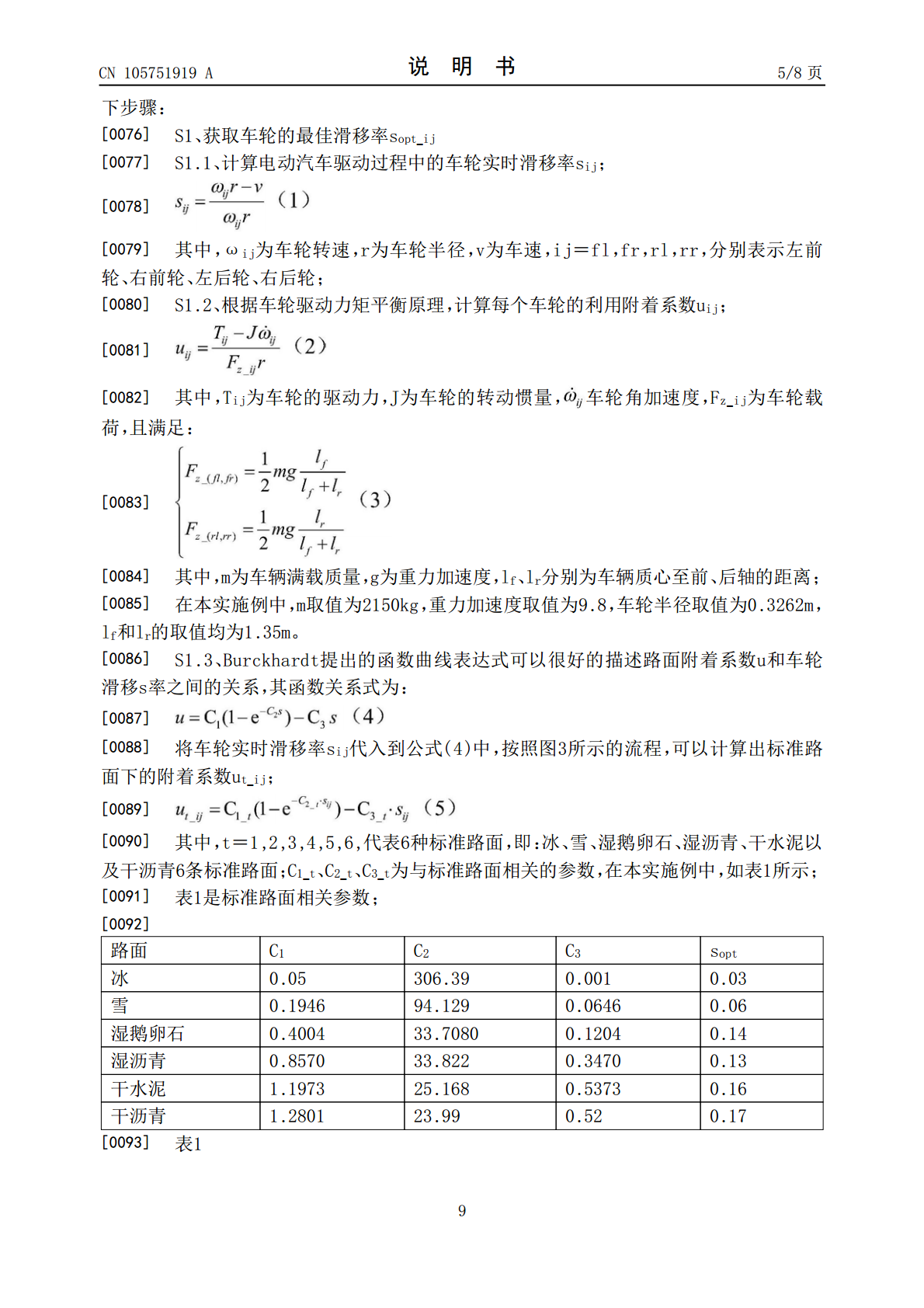
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种四轮轮毂电动汽车防滑控制方法.pdf
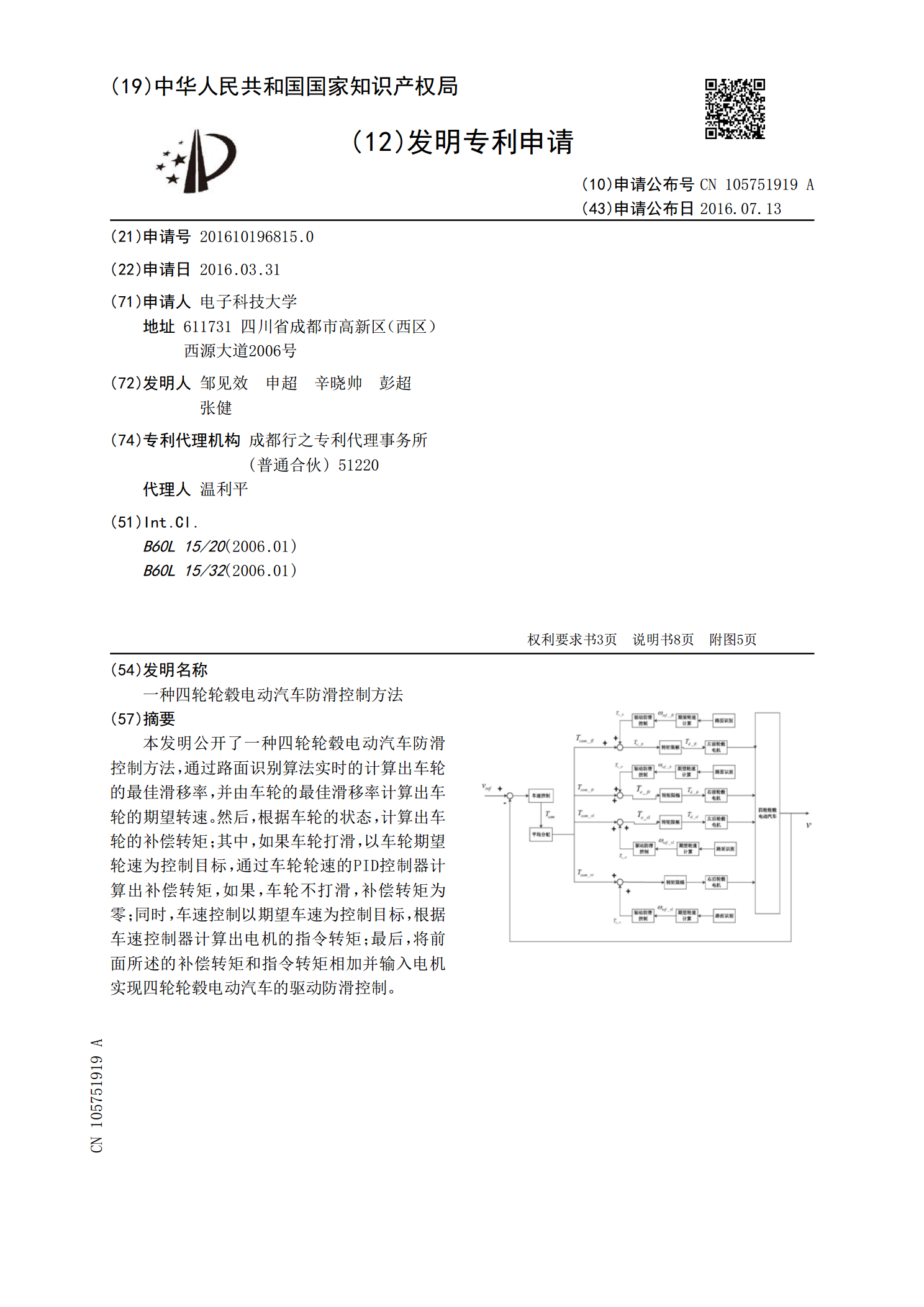
本发明公开了一种四轮轮毂电动汽车防滑控制方法,通过路面识别算法实时的计算出车轮的最佳滑移率,并由车轮的最佳滑移率计算出车轮的期望转速。然后,根据车轮的状态,计算出车轮的补偿转矩;其中,如果车轮打滑,以车轮期望轮速为控制目标,通过车轮轮速的PID控制器计算出补偿转矩,如果,车轮不打滑,补偿转矩为零;同时,车速控制以期望车速为控制目标,根据车速控制器计算出电机的指令转矩;最后,将前面所述的补偿转矩和指令转矩相加并输入电机实现四轮轮毂电动汽车的驱动防滑控制。

基于轮毂电机的纯电动汽车驱动防滑控制系统及方法.pdf
本发明提供一种基于轮毂电机的纯电动汽车驱动防滑控制方法,获取左前轮、右前轮、左后轮和右后轮的轮速,判断左前轮、右前轮的轮速差值是否小于或等于150r/min,是则取左前轮轮速w1作为前轮目标转速,否则取较小者为前轮目标转速;同理算出后轮目标转速M_Speed_R;二者比较得到整车的目标转速;分别将4个车轮的轮速与整车的目标转速对比,当判断该车轮有飞转的趋势,则降低发送给该车轮的轮毂电机控制器的力矩命令;当4个车轮的轮速均在合理范围内,则发送给各个轮毂电机控制器的力矩命令恢复为由驾驶员意图决定其大小的模式,

一种电动汽车驱动防滑控制方法.pdf
本发明揭示了一种电动汽车驱动防滑控制方法,根据轮速信号、转向信号等信号,判断是否进入打滑控制,利用VCU、TBD和MCU配合实现防滑操控。本发明可对未配备ESP的电动汽车,在满油门起步时,利用整车控制器解决车辆驱动打滑的问题,为低配车辆提供更多保护并提升驾驶感受。
一种电动汽车防滑控制方法及其整车系统.pdf
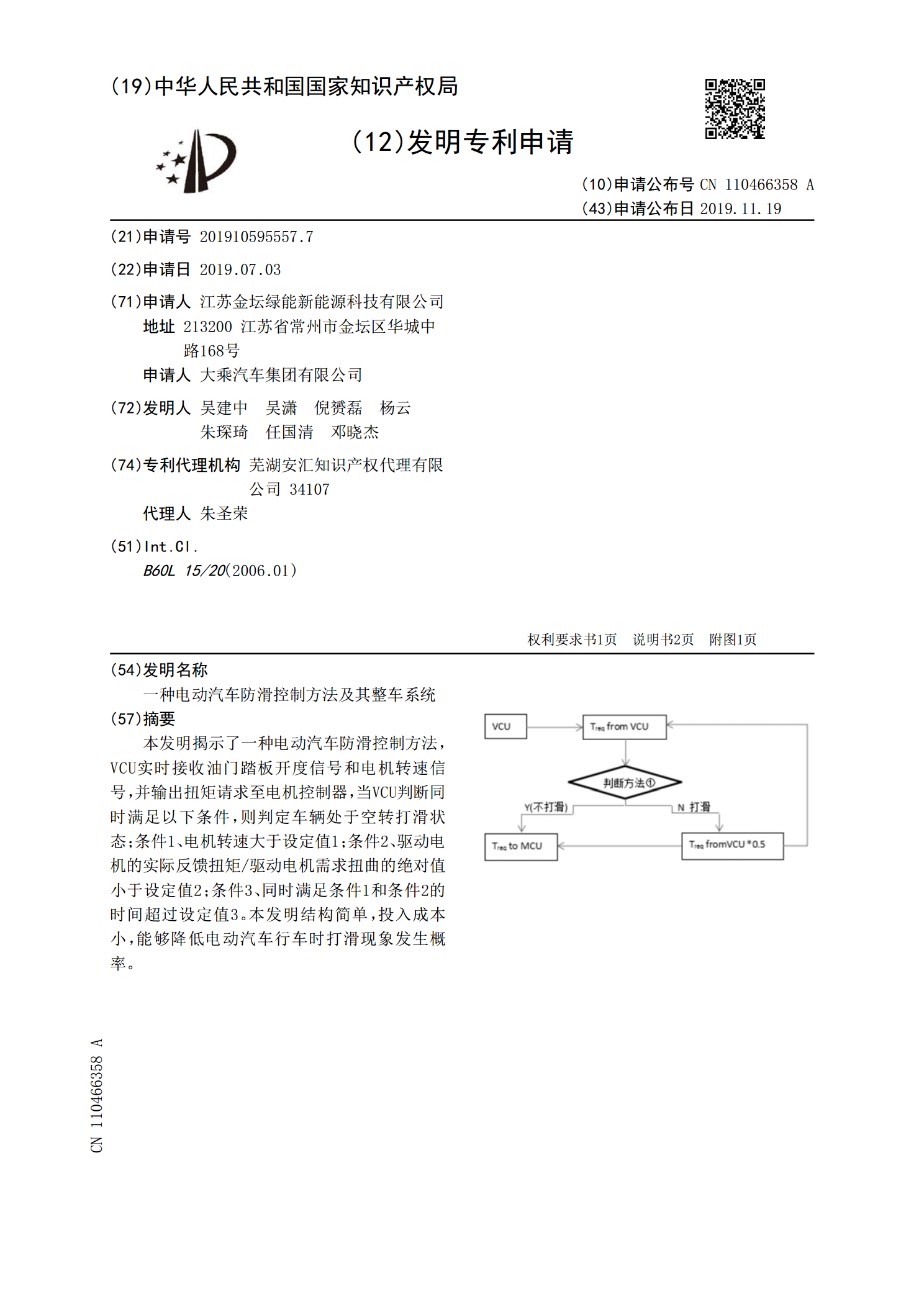
本发明揭示了一种电动汽车防滑控制方法,VCU实时接收油门踏板开度信号和电机转速信号,并输出扭矩请求至电机控制器,当VCU判断同时满足以下条件,则判定车辆处于空转打滑状态;条件1、电机转速大于设定值1;条件2、驱动电机的实际反馈扭矩/驱动电机需求扭曲的绝对值小于设定值2;条件3、同时满足条件1和条件2的时间超过设定值3。本发明结构简单,投入成本小,能够降低电动汽车行车时打滑现象发生概率。

一种纯电动汽车驱动防滑系统及控制方法.pdf
本发明涉及一种纯电动汽车驱动防滑系统及控制方法,系统包括有MCU综合驱动控制器、驱动电机以及轮速检测装置;轮速检测装置设置于车轮上,与MCU综合驱动控制器通信连接;驱动电机与MCU综合驱动控制器通信连接,用于驱动车轮;轮速检测装置用于检测车轮的轮速和/或加速度,并传输至MCU综合驱动控制器;MCU综合驱动控制器接收轮速和/或加速度,并计算滑移率;当滑移率或加速度超出阈值时,MCU综合驱动控制器触发驱动防滑功能,通过调节驱动电机的扭矩从而保证车辆总体动力性;本发明提供的方案控制模块少、可靠性高,不需要ESP