
一种电动汽车驱动防滑控制方法.pdf

萌运****魔王


1/6

2/6

3/6
4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种电动汽车驱动防滑控制方法.pdf
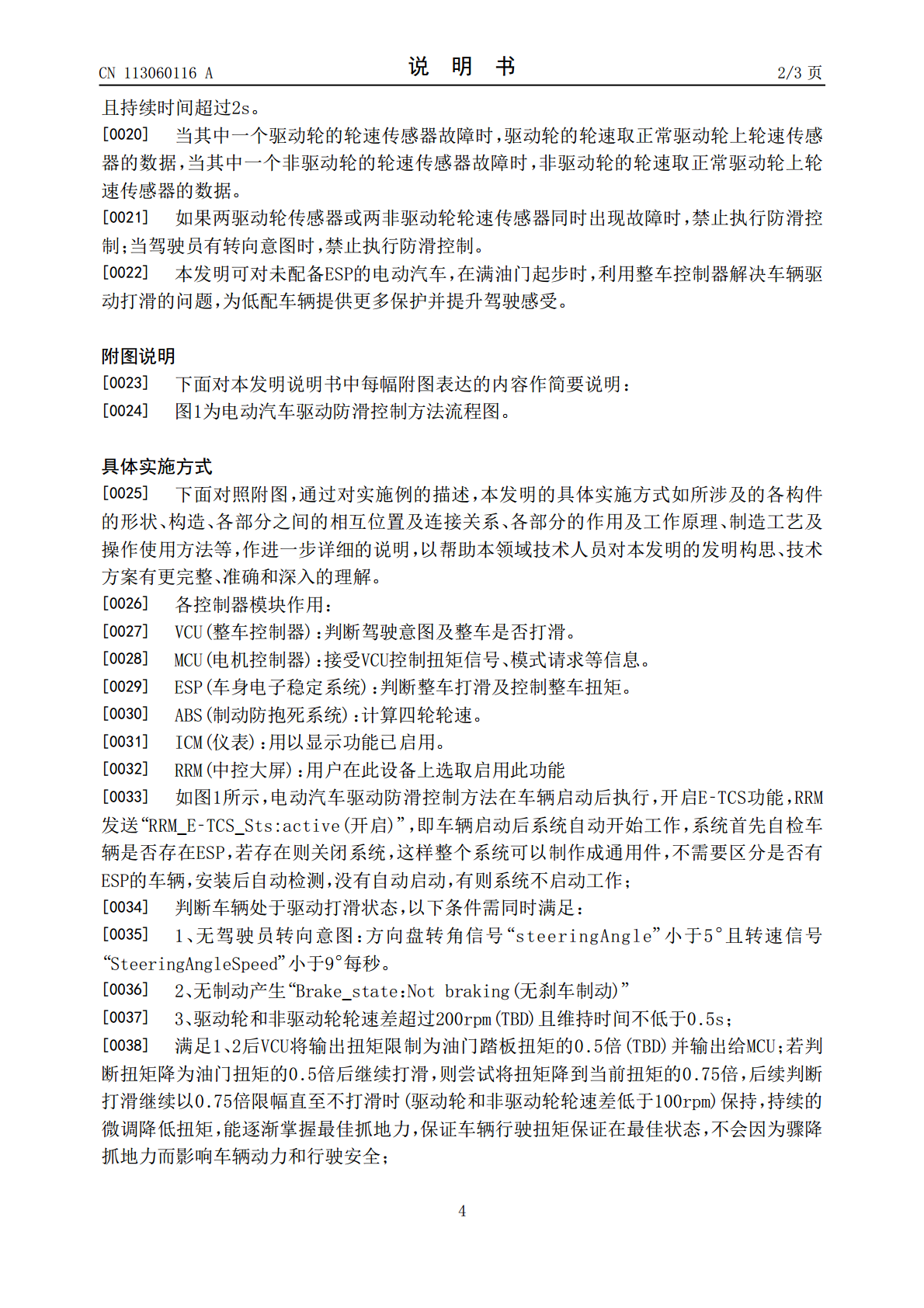
本发明揭示了一种电动汽车驱动防滑控制方法,根据轮速信号、转向信号等信号,判断是否进入打滑控制,利用VCU、TBD和MCU配合实现防滑操控。本发明可对未配备ESP的电动汽车,在满油门起步时,利用整车控制器解决车辆驱动打滑的问题,为低配车辆提供更多保护并提升驾驶感受。

一种纯电动汽车驱动防滑系统及控制方法.pdf
本发明涉及一种纯电动汽车驱动防滑系统及控制方法,系统包括有MCU综合驱动控制器、驱动电机以及轮速检测装置;轮速检测装置设置于车轮上,与MCU综合驱动控制器通信连接;驱动电机与MCU综合驱动控制器通信连接,用于驱动车轮;轮速检测装置用于检测车轮的轮速和/或加速度,并传输至MCU综合驱动控制器;MCU综合驱动控制器接收轮速和/或加速度,并计算滑移率;当滑移率或加速度超出阈值时,MCU综合驱动控制器触发驱动防滑功能,通过调节驱动电机的扭矩从而保证车辆总体动力性;本发明提供的方案控制模块少、可靠性高,不需要ESP
一种用于分布式驱动电动汽车的驱动防滑控制方法及系统.pdf
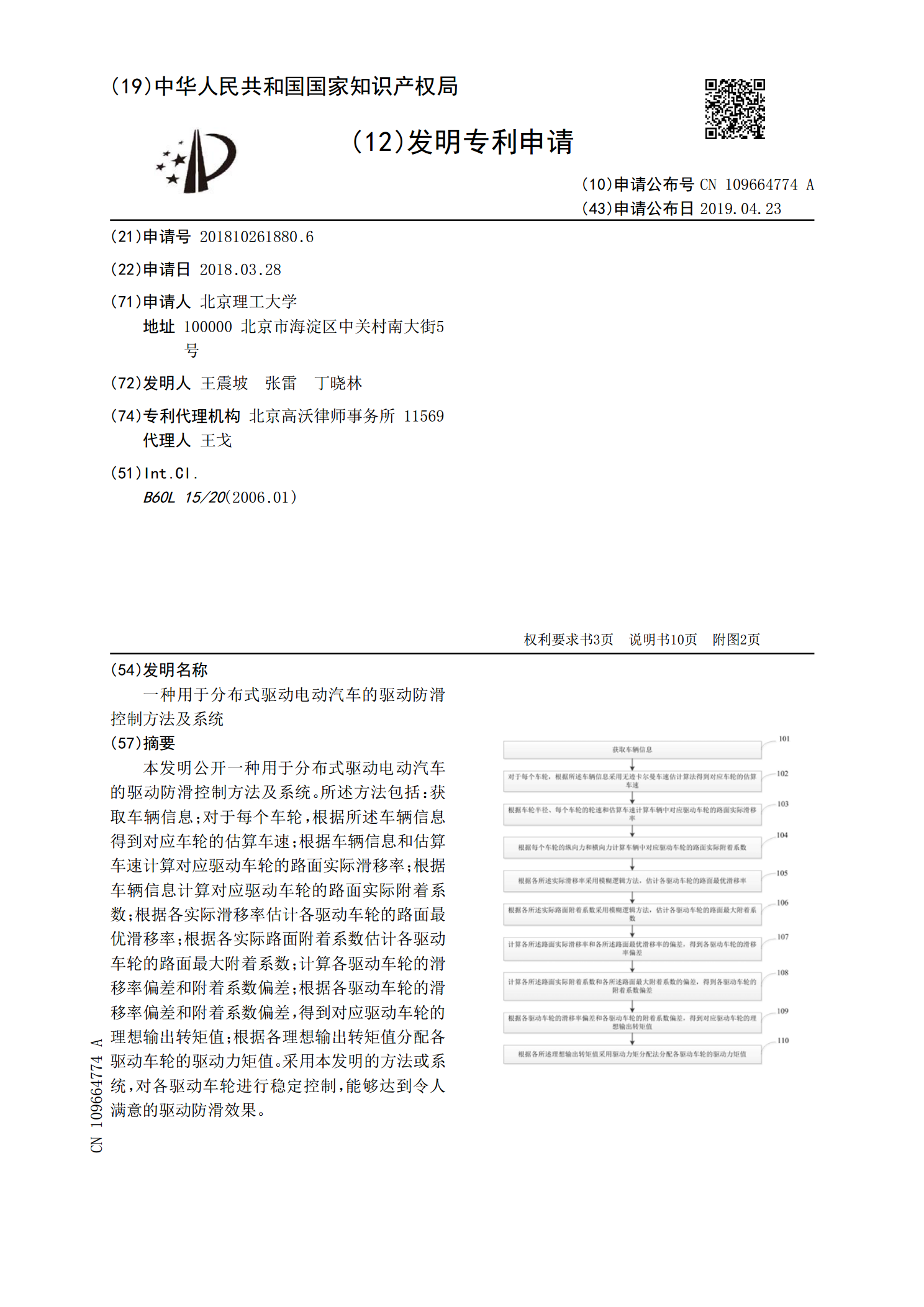
本发明公开一种用于分布式驱动电动汽车的驱动防滑控制方法及系统。所述方法包括:获取车辆信息;对于每个车轮,根据所述车辆信息得到对应车轮的估算车速;根据车辆信息和估算车速计算对应驱动车轮的路面实际滑移率;根据车辆信息计算对应驱动车轮的路面实际附着系数;根据各实际滑移率估计各驱动车轮的路面最优滑移率;根据各实际路面附着系数估计各驱动车轮的路面最大附着系数;计算各驱动车轮的滑移率偏差和附着系数偏差;根据各驱动车轮的滑移率偏差和附着系数偏差,得到对应驱动车轮的理想输出转矩值;根据各理想输出转矩值分配各驱动车轮的驱动
一种电动汽车的驱动防滑控制方法及双电机四驱电动汽车.pdf
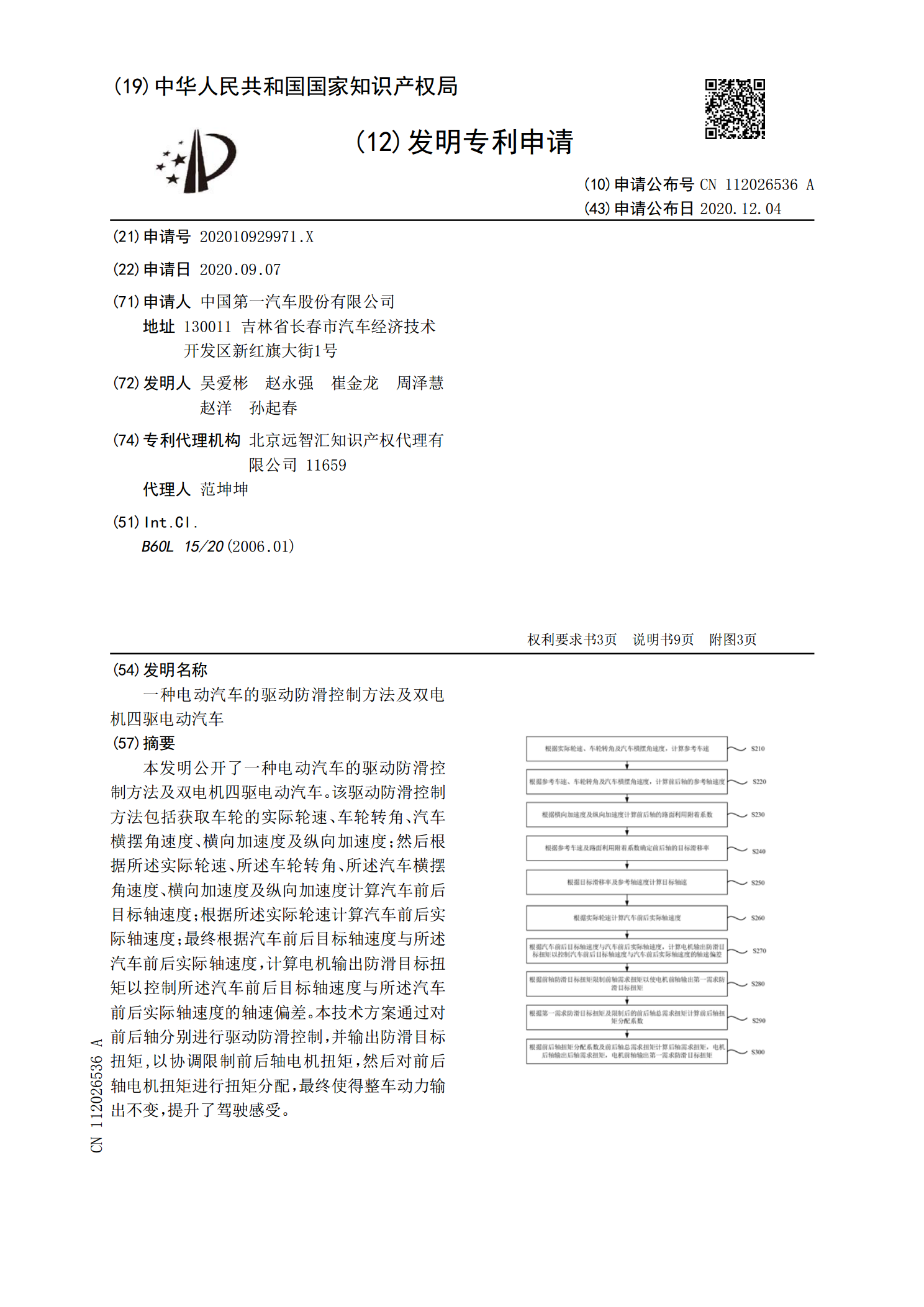
本发明公开了一种电动汽车的驱动防滑控制方法及双电机四驱电动汽车。该驱动防滑控制方法包括获取车轮的实际轮速、车轮转角、汽车横摆角速度、横向加速度及纵向加速度;然后根据所述实际轮速、所述车轮转角、所述汽车横摆角速度、横向加速度及纵向加速度计算汽车前后目标轴速度;根据所述实际轮速计算汽车前后实际轴速度;最终根据汽车前后目标轴速度与所述汽车前后实际轴速度,计算电机输出防滑目标扭矩以控制所述汽车前后目标轴速度与所述汽车前后实际轴速度的轴速偏差。本技术方案通过对前后轴分别进行驱动防滑控制,并输出防滑目标扭矩,以协调限

电动汽车驱动防滑控制方法对比分析1.pdf
电动汽车驱动防滑控制方法对比分析张兆良(同济大学中德学院,上海200092)【摘要】首先概述了电动车整车系统动力学控制的特点,再者对比分析了PID控制、模型跟踪控制以及动态自寻最佳滑转率的滑模变结构控制三种驱动防滑控制算法的优缺点,最后对后两种控制方法的鲁棒性进行对比分析,得到了动态自寻最佳滑转率的滑模变结构控制抗干扰性较强的结论。【Abstract】Firstly,thecharacteristicforthesystemdynamiccontrolinEVisintroduced.Then,thead