
一种两轮自平衡车控制系统.pdf

明轩****la


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种两轮自平衡车控制系统.pdf
本发明公开了一种两轮自平衡车控制系统,所述系统的参数调试的采用无线通信方式,通过滑阻改变参数值的大小进行实时参数传输和调试,对其中PID控制的PD参数进行调节改变,通过编程的方式将之前写好的无线控制程序烧录到单片机内部,无线传输模块分为发送机A和接收机B,发送机A上与两个滑动变阻器相连,每当滑阻值在人为的不停的有规律的变化时,发送机A此时就将每一个滑阻值传输给接收机B,同样在接收机B中将这个接收的值放入对应的算法中去运算,此时可以看到智能平衡车的摇摆情况再去调整发送机A上要传输的值的大小,人为的进行反馈调

两轮自平衡车控制系统的研究.docx
两轮自平衡车控制系统的研究两轮自平衡车控制系统的研究摘要:自平衡车是一种能够在两个轮子间自主平衡的交通工具。本文通过对两轮自平衡车控制系统的研究,分析了其原理和关键技术,并探讨了控制系统在实际应用中的挑战与解决方案。通过对现有研究成果的总结,提出了进一步改进和发展的建议,以推动两轮自平衡车技术的发展。关键词:两轮自平衡车、控制系统、原理、技术、挑战、解决方案1.引言两轮自平衡车作为一种新型交通工具,具有较小的体积和机动性,逐渐受到了人们的关注。其独特之处在于能够在两个轮子间实现自主平衡,根据倾斜角度实时调
一种自平衡两轮车.pdf
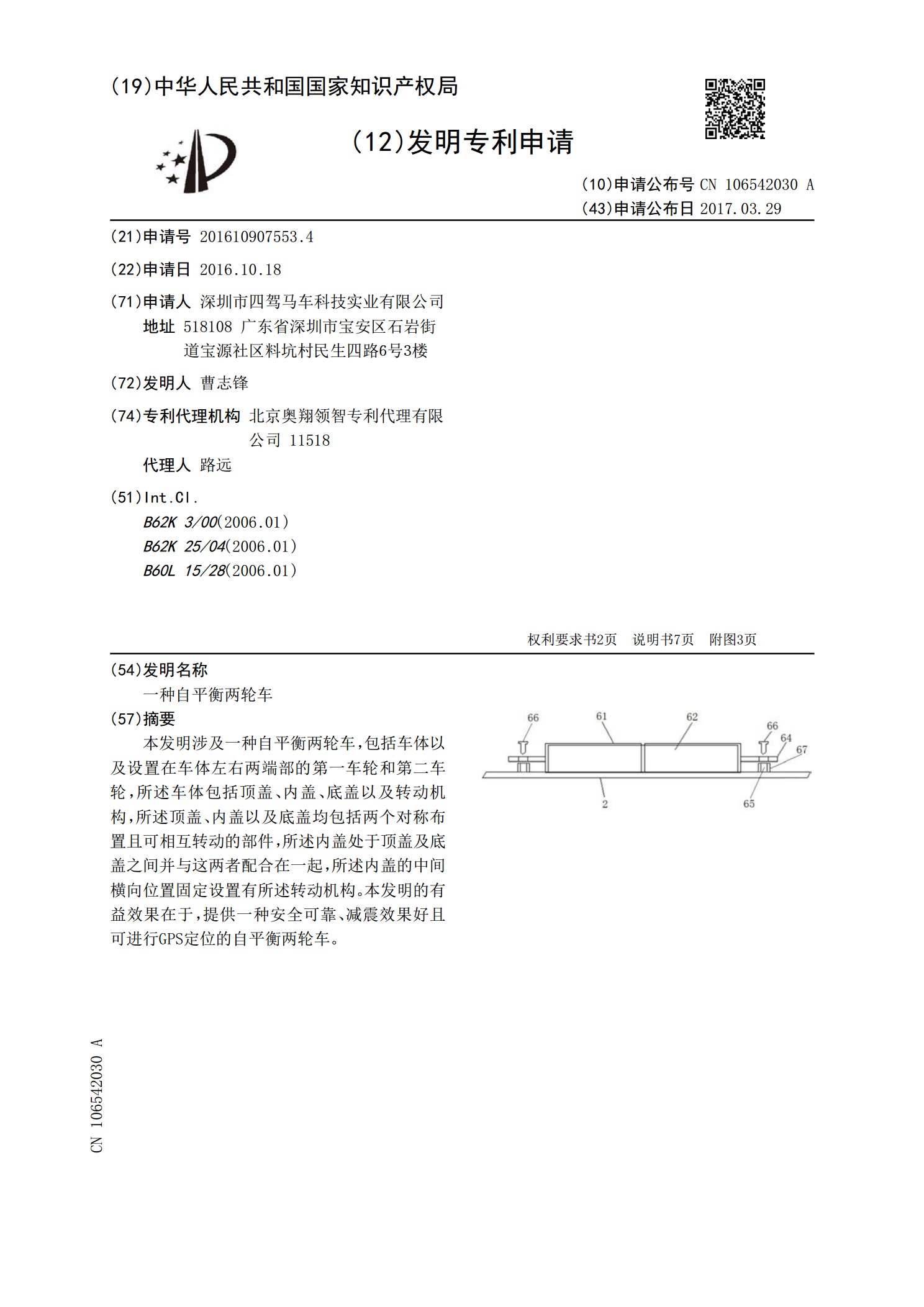
本发明涉及一种自平衡两轮车,包括车体以及设置在车体左右两端部的第一车轮和第二车轮,所述车体包括顶盖、内盖、底盖以及转动机构,所述顶盖、内盖以及底盖均包括两个对称布置且可相互转动的部件,所述内盖处于顶盖及底盖之间并与这两者配合在一起,所述内盖的中间横向位置固定设置有所述转动机构。本发明的有益效果在于,提供一种安全可靠、减震效果好且可进行GPS定位的自平衡两轮车。
两轮平衡车控制系统及两轮平衡车.pdf
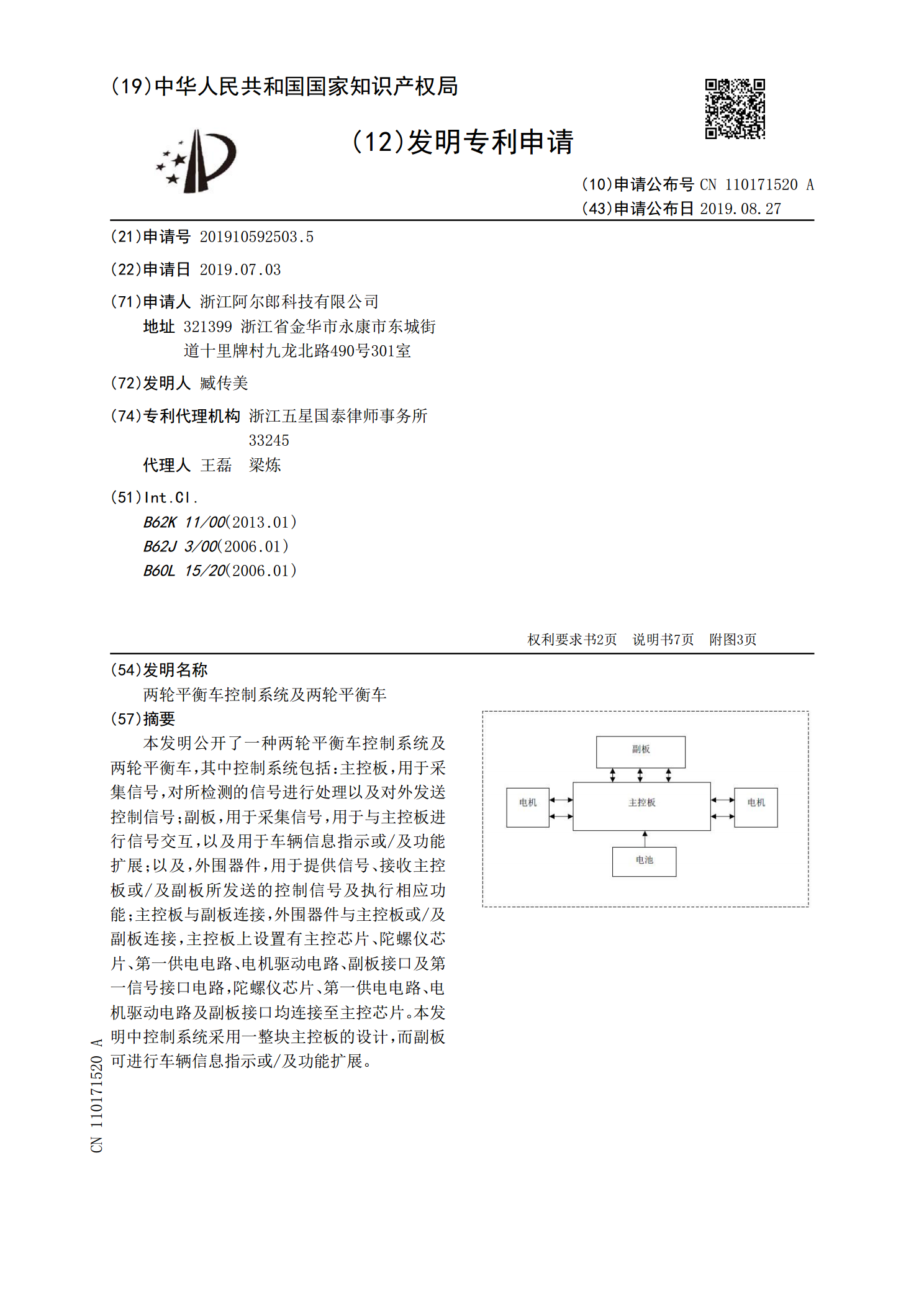
本发明公开了一种两轮平衡车控制系统及两轮平衡车,其中控制系统包括:主控板,用于采集信号,对所检测的信号进行处理以及对外发送控制信号;副板,用于采集信号,用于与主控板进行信号交互,以及用于车辆信息指示或/及功能扩展;以及,外围器件,用于提供信号、接收主控板或/及副板所发送的控制信号及执行相应功能;主控板与副板连接,外围器件与主控板或/及副板连接,主控板上设置有主控芯片、陀螺仪芯片、第一供电电路、电机驱动电路、副板接口及第一信号接口电路,陀螺仪芯片、第一供电电路、电机驱动电路及副板接口均连接至主控芯片。本发明

自平衡两轮车.pdf
本发明涉及一种自平衡两轮车,它包括车轮、踏板、踏板轴、车杆、把手、车把连接、车把连接法兰、和连接器,踏板轴由弯头、连接钢管及管法兰组成,车轮有两个,两轮左右横向布置在连接器两侧,在车轮上设有支撑人体的踏板,通过人力产生的一组力矩使自平衡车移动。虽然本自平衡小车需要人力驱动,但本发明最大的优点就是结构简单、价格低廉、绿色环保、制造方便。