
车身状态量估计装置.pdf

一条****贺6


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车身状态量估计装置.pdf
本发明涉及车身状态量估计装置。装置包括路面输入计算单元,路面输入计算单元通过使车辆运动模型矩阵和轮速影响元素模型矩阵的乘积的逆矩阵作用在车辆的轮速上来计算对于车轮的路面输入的估计值。车辆运动模型矩阵代表了力学的车辆运动模型,且轮速影响元素模型矩阵使用由于围绕车身的重心的俯仰而导致的影响量、悬架几何影响量和车轮滚动半径的变化的影响量。所述装置也包括车身状态量计算单元,车身状态量计算单元通过使车辆运动模型矩阵作用在计算出的路面输入的估计值上来计算车身状态量的估计值。

状态量估计装置.pdf
状态量估计装置构成为,对叶轮赋予给空气的能量即总焓、压缩机的隔热压缩效率以及扩散器的出口面处的空气的流速即扩散器出口流速进行运算,根据隔热压缩效率将从总焓减去基于扩散器出口流速的动能后的值分配为内部能量和压力能量,通过将内部能量和被叶轮压缩之前的空气的温度、即入口温度包含在变量的运算式来运算流入出口面的空气的温度、即压缩温度,并且通过将压力能量和被叶轮压缩之前的空气的压力、即入口压力包含在变量的运算式来运算流入出口面的空气的压力、即压缩压力。
路面状态估计方法和路面状态估计装置.pdf
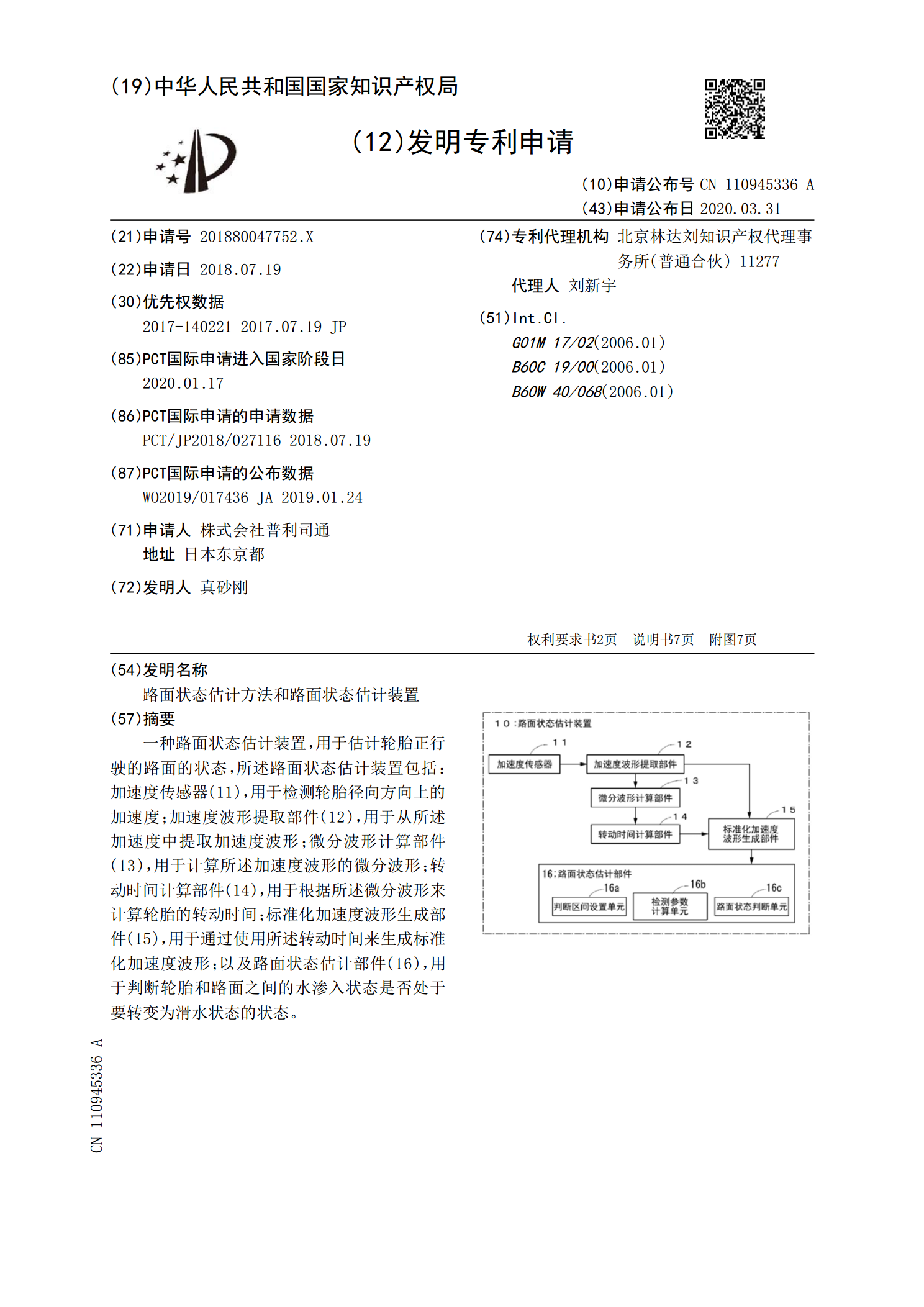
一种路面状态估计装置,用于估计轮胎正行驶的路面的状态,所述路面状态估计装置包括:加速度传感器(11),用于检测轮胎径向方向上的加速度;加速度波形提取部件(12),用于从所述加速度中提取加速度波形;微分波形计算部件(13),用于计算所述加速度波形的微分波形;转动时间计算部件(14),用于根据所述微分波形来计算轮胎的转动时间;标准化加速度波形生成部件(15),用于通过使用所述转动时间来生成标准化加速度波形;以及路面状态估计部件(16),用于判断轮胎和路面之间的水渗入状态是否处于要转变为滑水状态的状态。
路面状态估计方法和路面状态估计装置.pdf
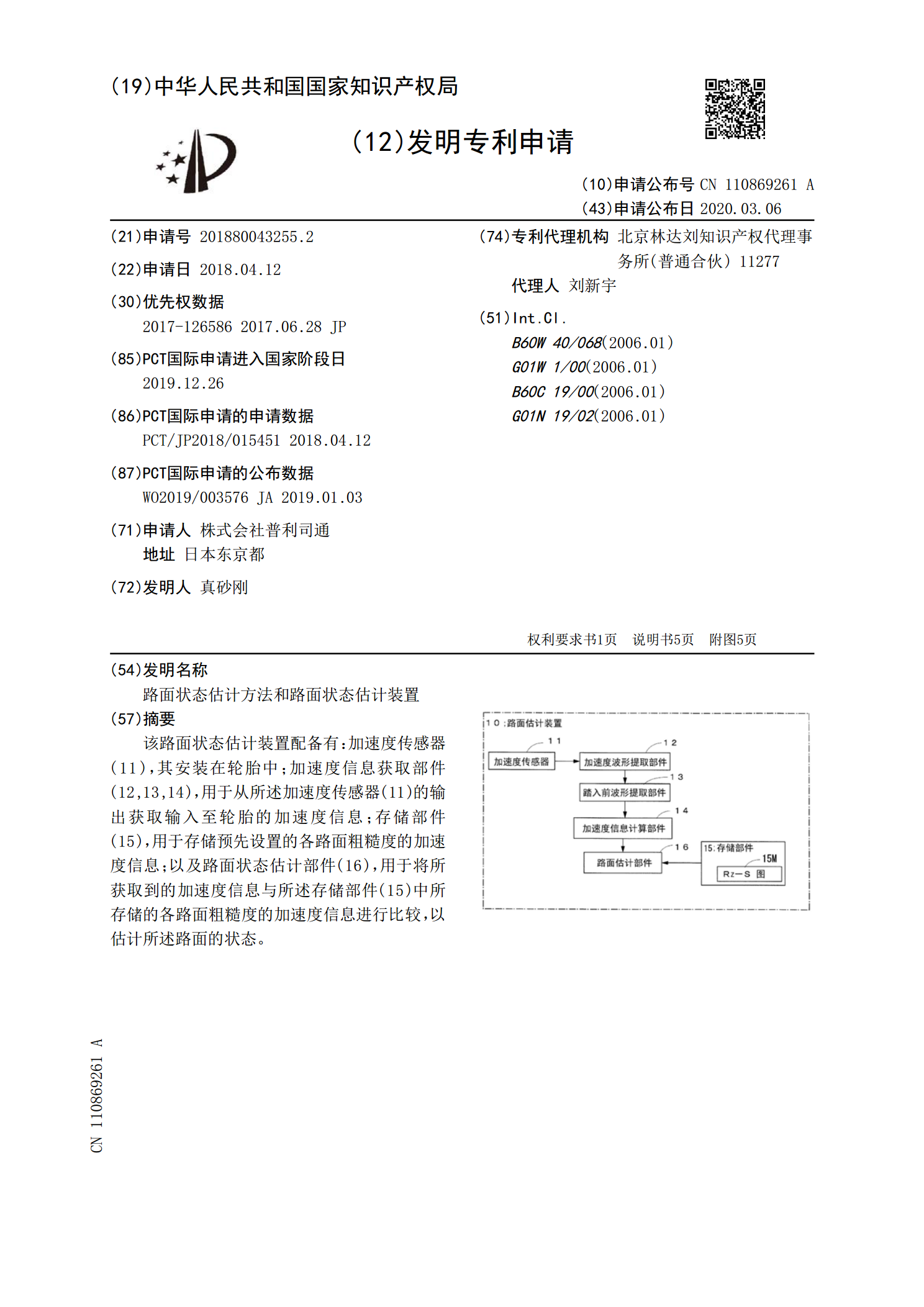
该路面状态估计装置配备有:加速度传感器(11),其安装在轮胎中;加速度信息获取部件(12,13,14),用于从所述加速度传感器(11)的输出获取输入至轮胎的加速度信息;存储部件(15),用于存储预先设置的各路面粗糙度的加速度信息;以及路面状态估计部件(16),用于将所获取到的加速度信息与所述存储部件(15)中所存储的各路面粗糙度的加速度信息进行比较,以估计所述路面的状态。
车辆状态估计装置.pdf
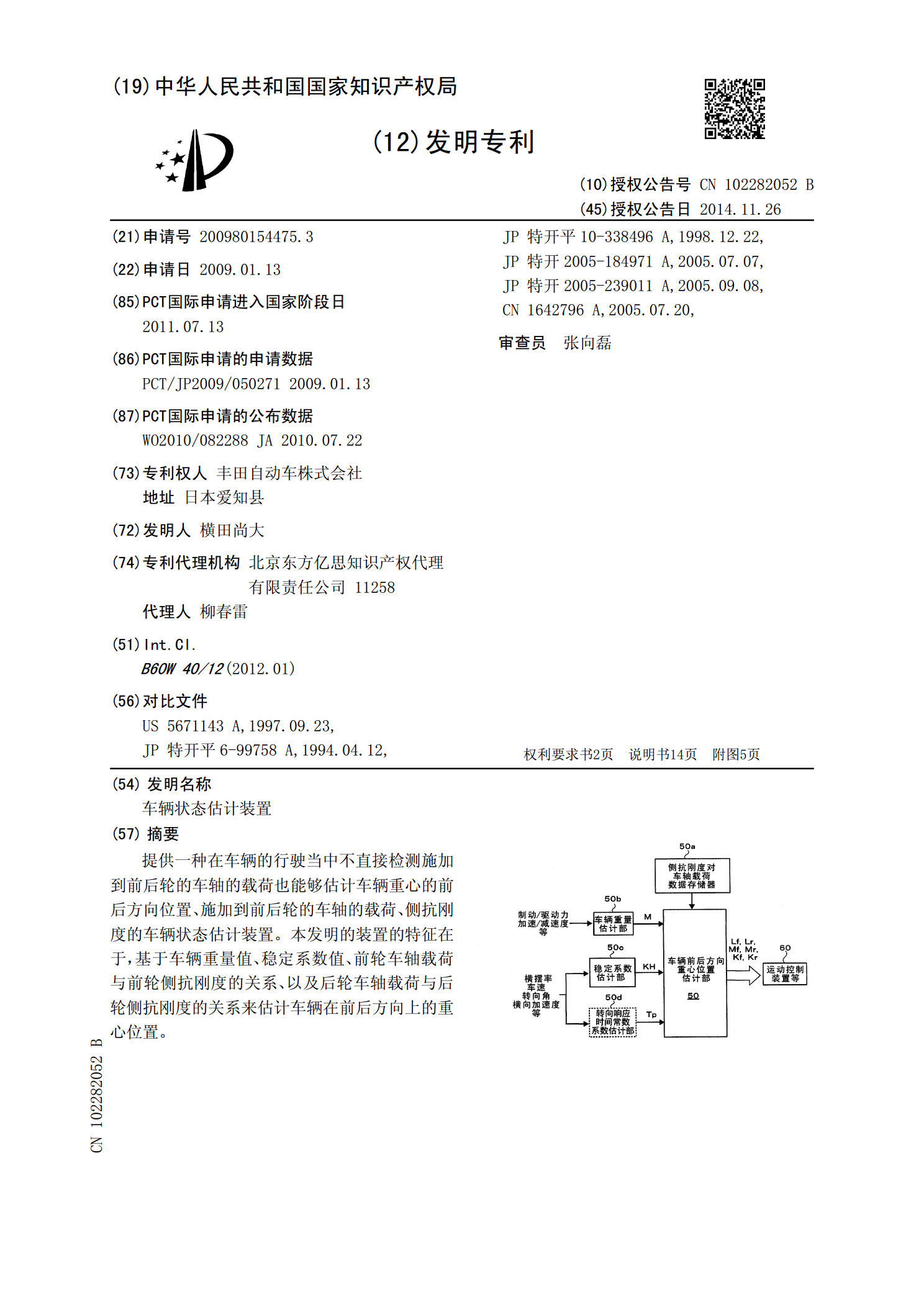
提供一种在车辆的行驶当中不直接检测施加到前后轮的车轴的载荷也能够估计车辆重心的前后方向位置、施加到前后轮的车轴的载荷、侧抗刚度的车辆状态估计装置。本发明的装置的特征在于,基于车辆重量值、稳定系数值、前轮车轴载荷与前轮侧抗刚度的关系、以及后轮车轴载荷与后轮侧抗刚度的关系来估计车辆在前后方向上的重心位置。