
采用轮毂电机的AGV弹性支撑驱动装置及AGV小车.pdf

美丽****ka

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
采用轮毂电机的AGV弹性支撑驱动装置及AGV小车.pdf
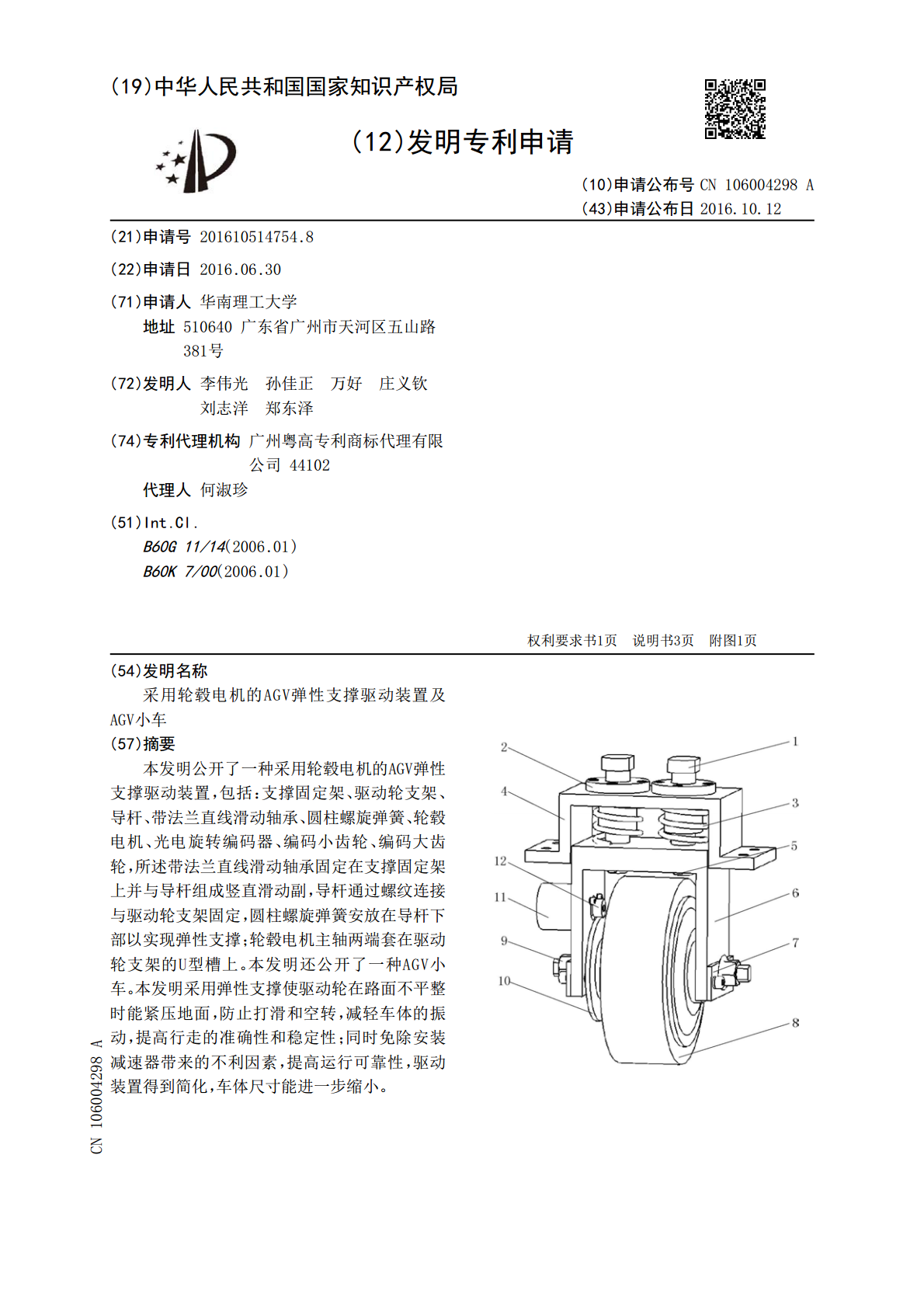
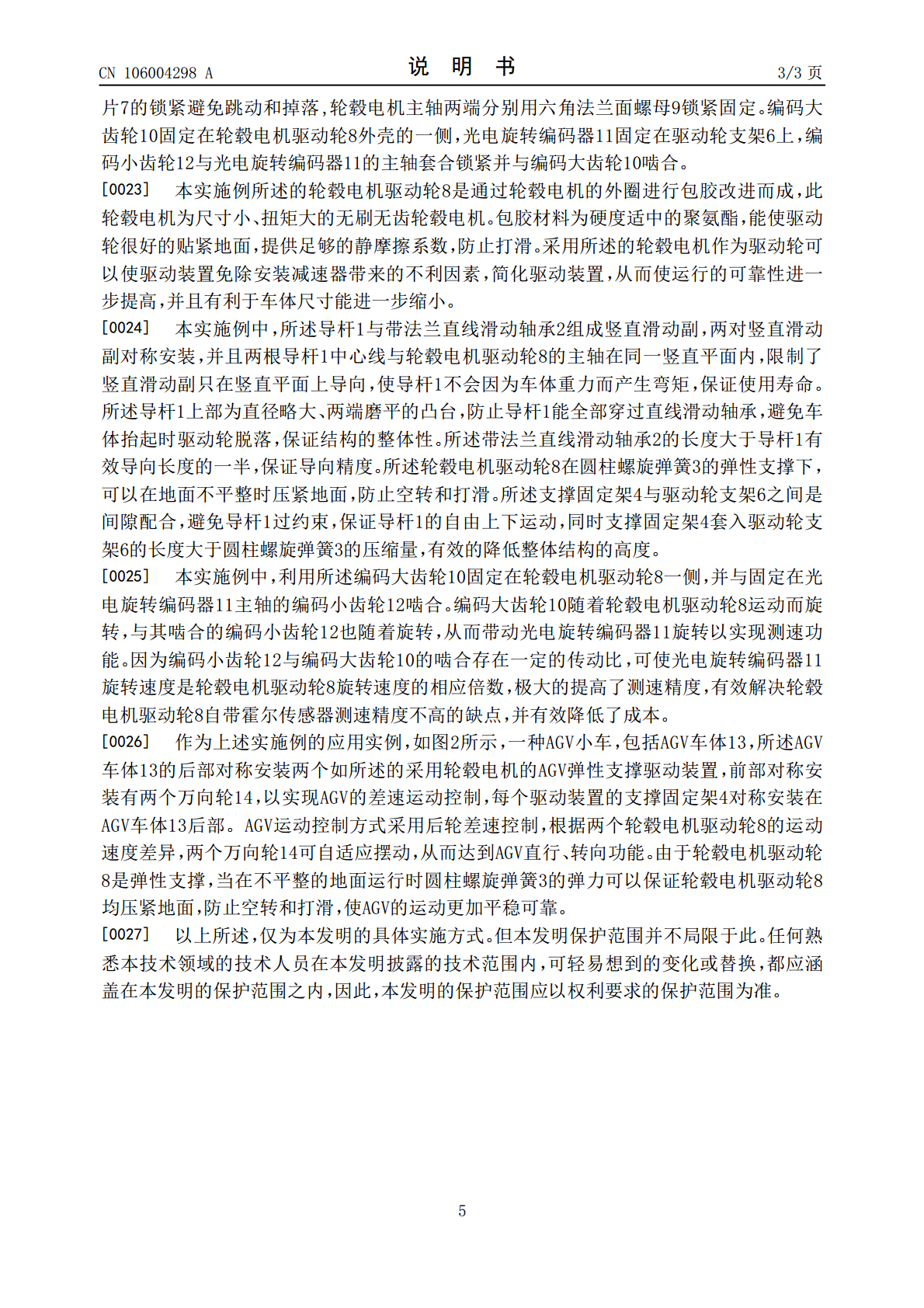
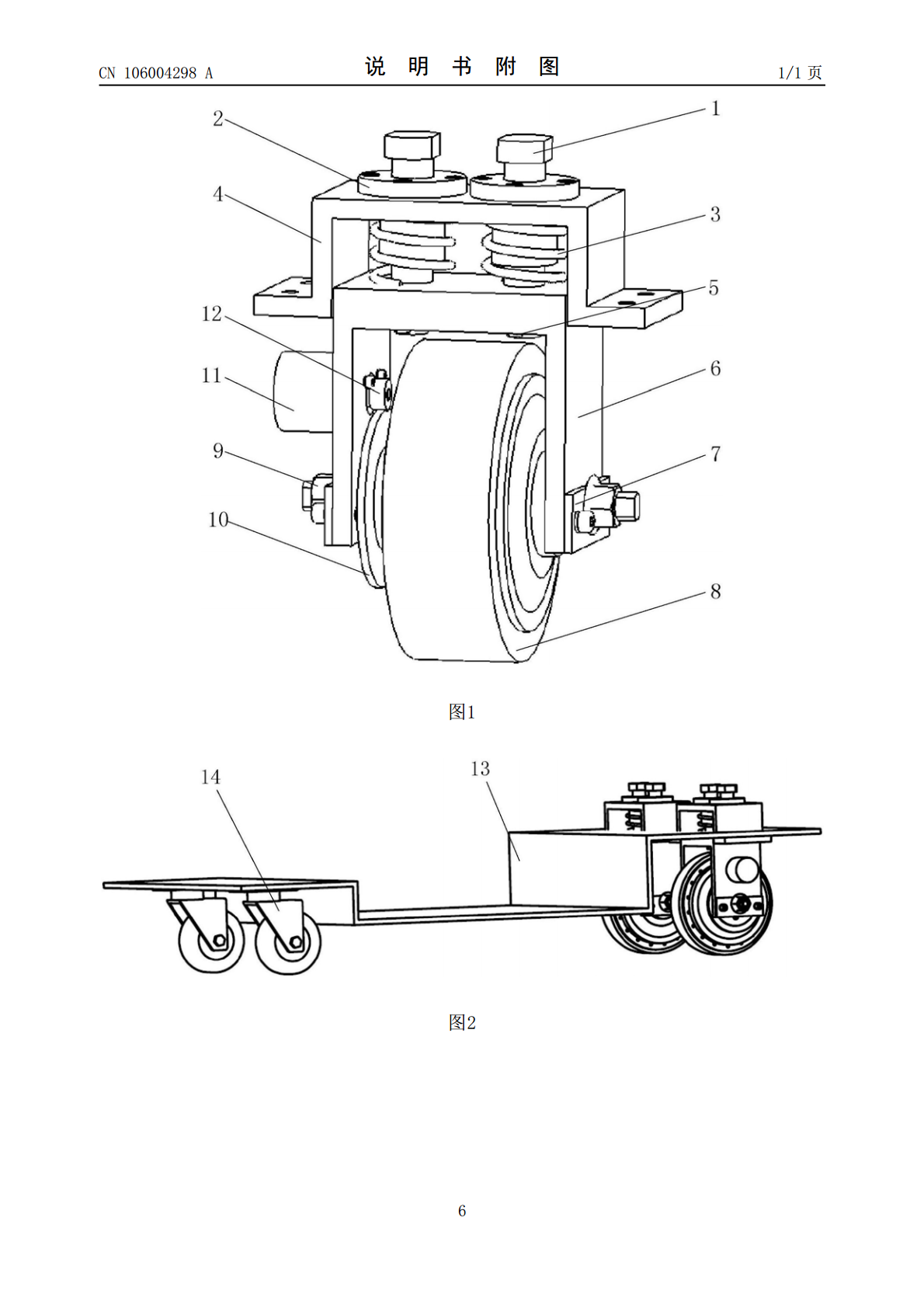
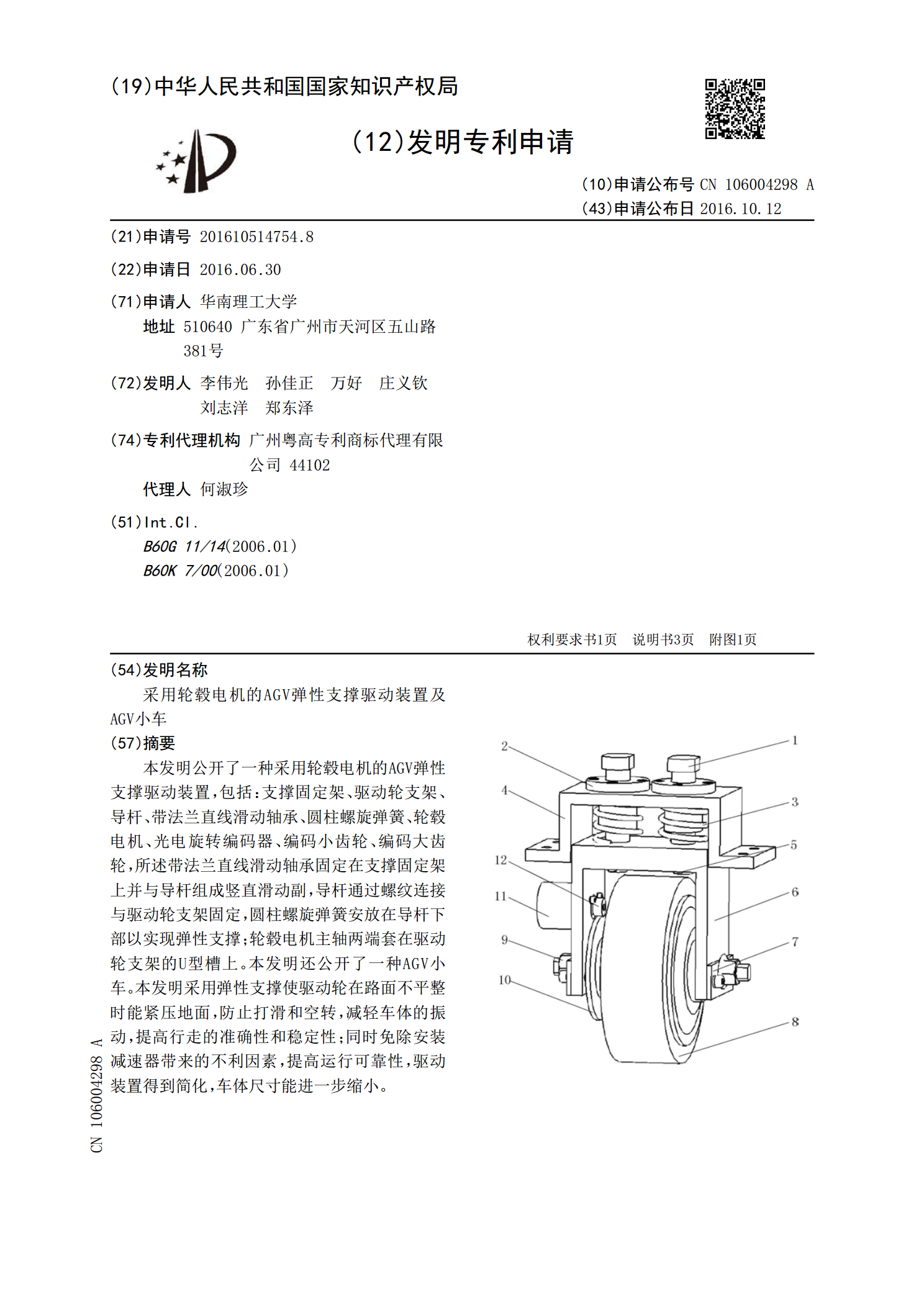
本发明公开了一种采用轮毂电机的AGV弹性支撑驱动装置,包括:支撑固定架、驱动轮支架、导杆、带法兰直线滑动轴承、圆柱螺旋弹簧、轮毂电机、光电旋转编码器、编码小齿轮、编码大齿轮,所述带法兰直线滑动轴承固定在支撑固定架上并与导杆组成竖直滑动副,导杆通过螺纹连接与驱动轮支架固定,圆柱螺旋弹簧安放在导杆下部以实现弹性支撑;轮毂电机主轴两端套在驱动轮支架的U型槽上。本发明还公开了一种AGV小车。本发明采用弹性支撑使驱动轮在路面不平整时能紧压地面,防止打滑和空转,减轻车体的振动,提高行走的准确性和稳定性;同时免除安装减

一种采用轮毂电机的AGV弹性支撑驱动装置.pdf
本发明公开了一种采用轮毂电机的AGV弹性支撑驱动装置,带法兰直线滑动轴承固定在支撑固定架上,导杆的带螺纹端穿过带法兰直线滑动轴承,圆柱螺旋弹簧安放在导杆下部,导杆通过螺纹与驱动轮支架固定,轮毂电机的主轴两端套在驱动轮支架的U型槽上,防松片的U型槽套在轮毂电机的主轴外伸部分并固定在驱动轮支架上,编码大齿轮固定在轮毂电机的外壳的一端,光电旋转编码器固定在驱动轮支架上,编码小齿轮固定在光电旋转编码器的主轴并与编码大齿轮啮合。采用弹性支撑使驱动轮在路面不平整时能紧压地面,防止打滑和空转,减轻车体的振动,提高行走的
采用轮毂电机驱动的AGV小车及路径规划方法.pdf
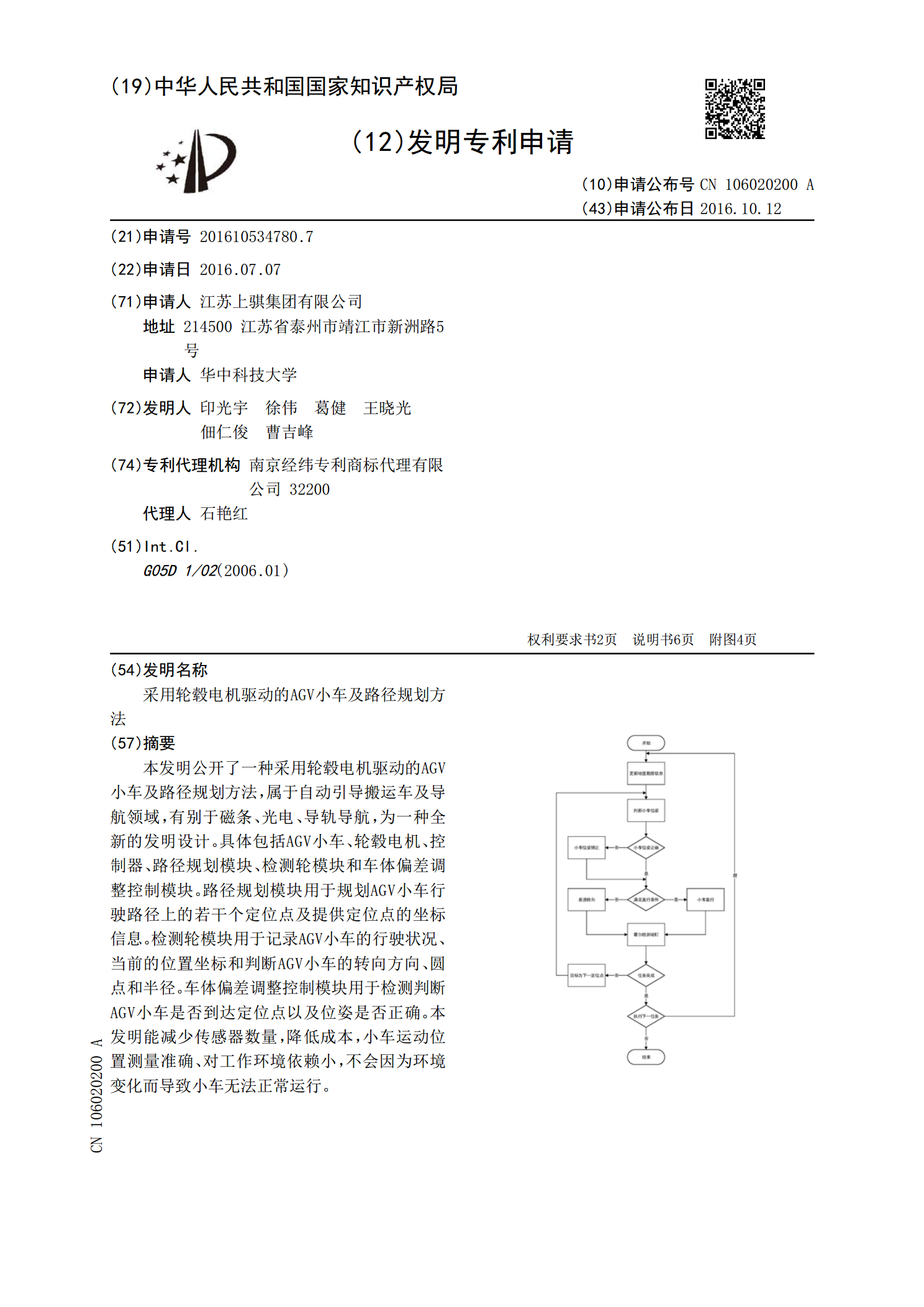
本发明公开了一种采用轮毂电机驱动的AGV小车及路径规划方法,属于自动引导搬运车及导航领域,有别于磁条、光电、导轨导航,为一种全新的发明设计。具体包括AGV小车、轮毂电机、控制器、路径规划模块、检测轮模块和车体偏差调整控制模块。路径规划模块用于规划AGV小车行驶路径上的若干个定位点及提供定位点的坐标信息。检测轮模块用于记录AGV小车的行驶状况、当前的位置坐标和判断AGV小车的转向方向、圆点和半径。车体偏差调整控制模块用于检测判断AGV小车是否到达定位点以及位姿是否正确。本发明能减少传感器数量,降低成本,小车
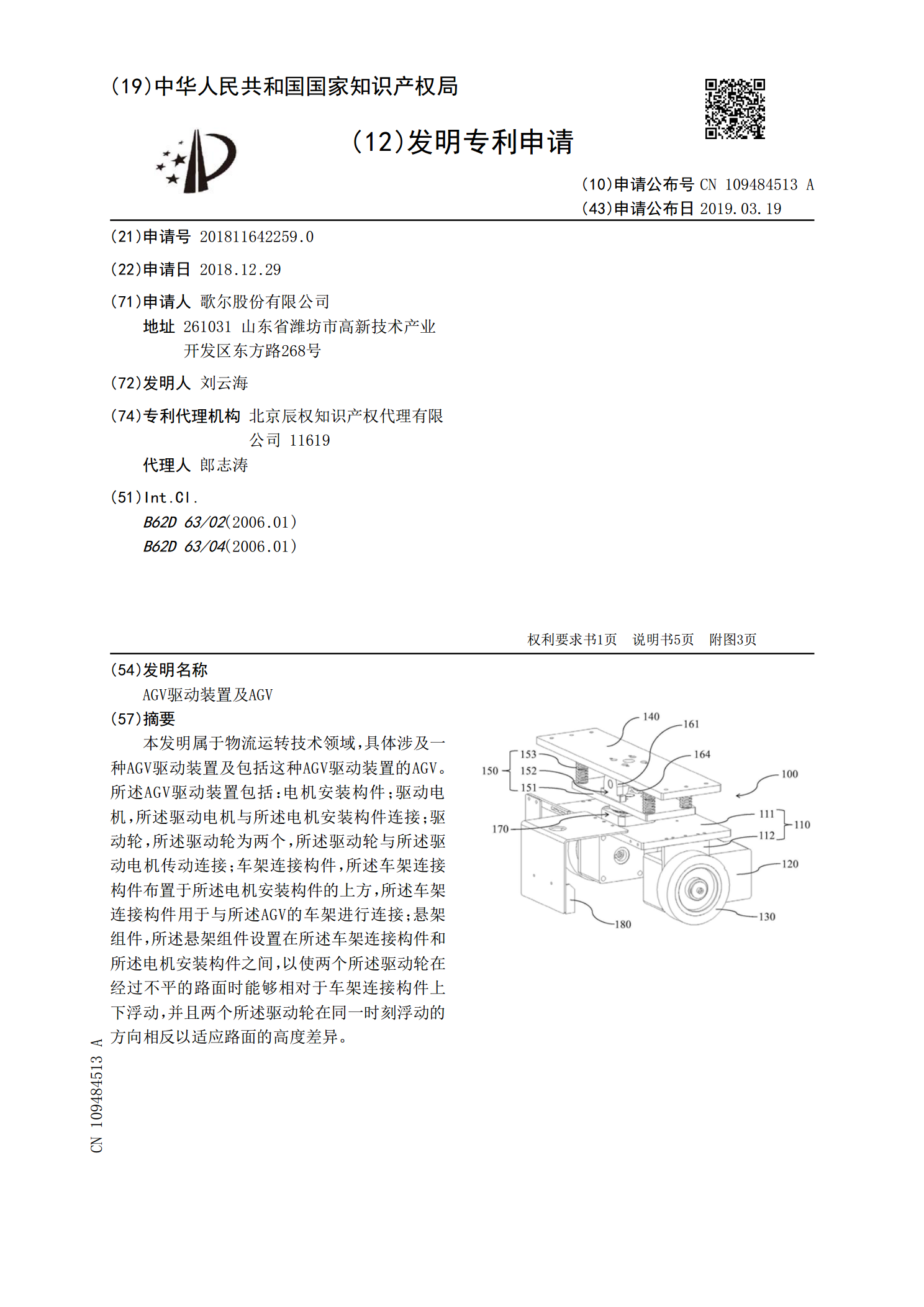
AGV驱动装置及AGV.pdf
本发明属于物流运转技术领域,具体涉及一种AGV驱动装置及包括这种AGV驱动装置的AGV。所述AGV驱动装置包括:电机安装构件;驱动电机,所述驱动电机与所述电机安装构件连接;驱动轮,所述驱动轮为两个,所述驱动轮与所述驱动电机传动连接;车架连接构件,所述车架连接构件布置于所述电机安装构件的上方,所述车架连接构件用于与所述AGV的车架进行连接;悬架组件,所述悬架组件设置在所述车架连接构件和所述电机安装构件之间,以使两个所述驱动轮在经过不平的路面时能够相对于车架连接构件上下浮动,并且两个所述驱动轮在同一时刻浮动的
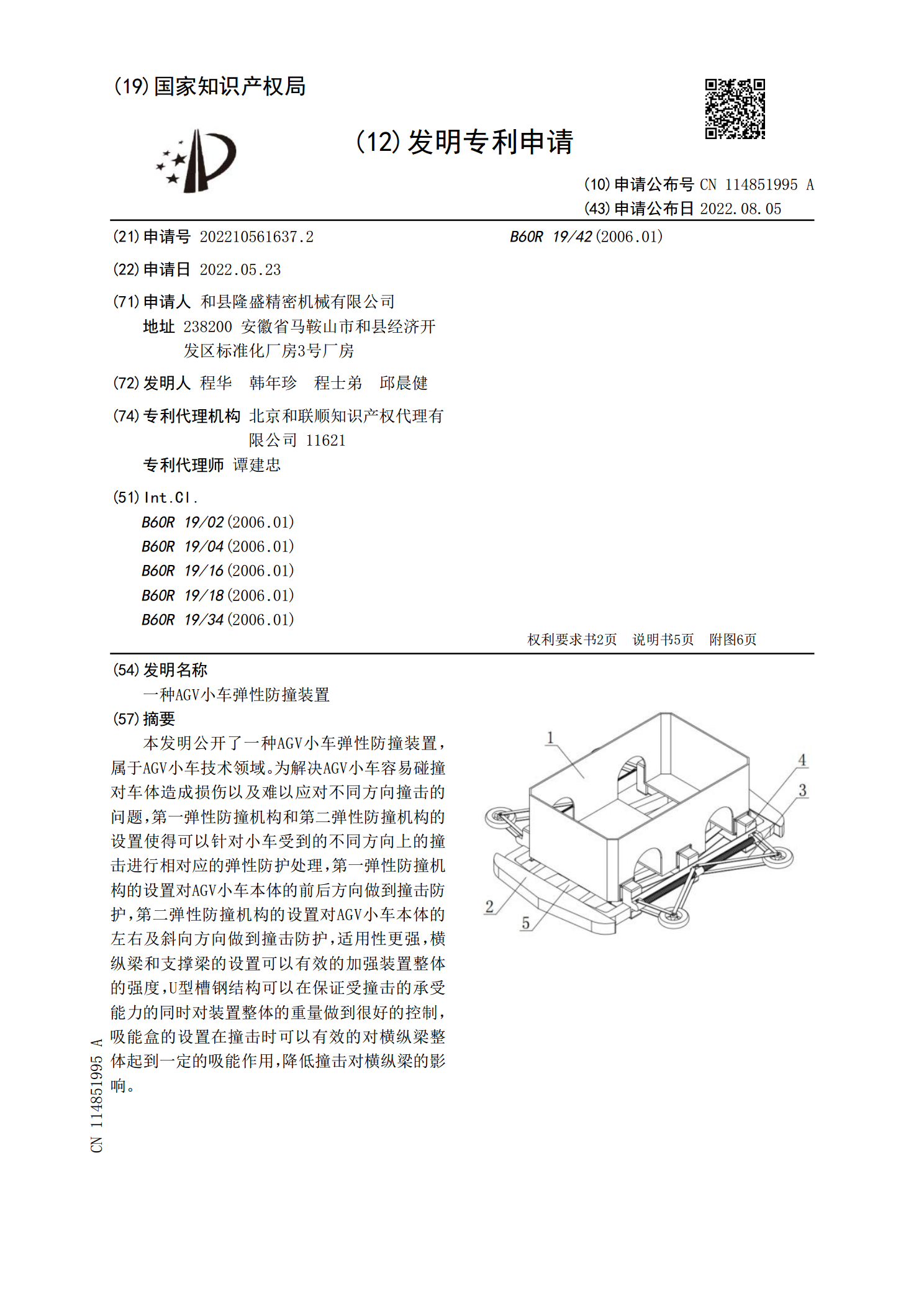
一种AGV小车弹性防撞装置.pdf
本发明公开了一种AGV小车弹性防撞装置,属于AGV小车技术领域。为解决AGV小车容易碰撞对车体造成损伤以及难以应对不同方向撞击的问题,第一弹性防撞机构和第二弹性防撞机构的设置使得可以针对小车受到的不同方向上的撞击进行相对应的弹性防护处理,第一弹性防撞机构的设置对AGV小车本体的前后方向做到撞击防护,第二弹性防撞机构的设置对AGV小车本体的左右及斜向方向做到撞击防护,适用性更强,横纵梁和支撑梁的设置可以有效的加强装置整体的强度,U型槽钢结构可以在保证受撞击的承受能力的同时对装置整体的重量做到很好的控制,吸能