
电动四轮驱动混合电动车辆的前后轮扭矩分配的控制方法.pdf

Ro****44

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电动四轮驱动混合电动车辆的前后轮扭矩分配的控制方法.pdf
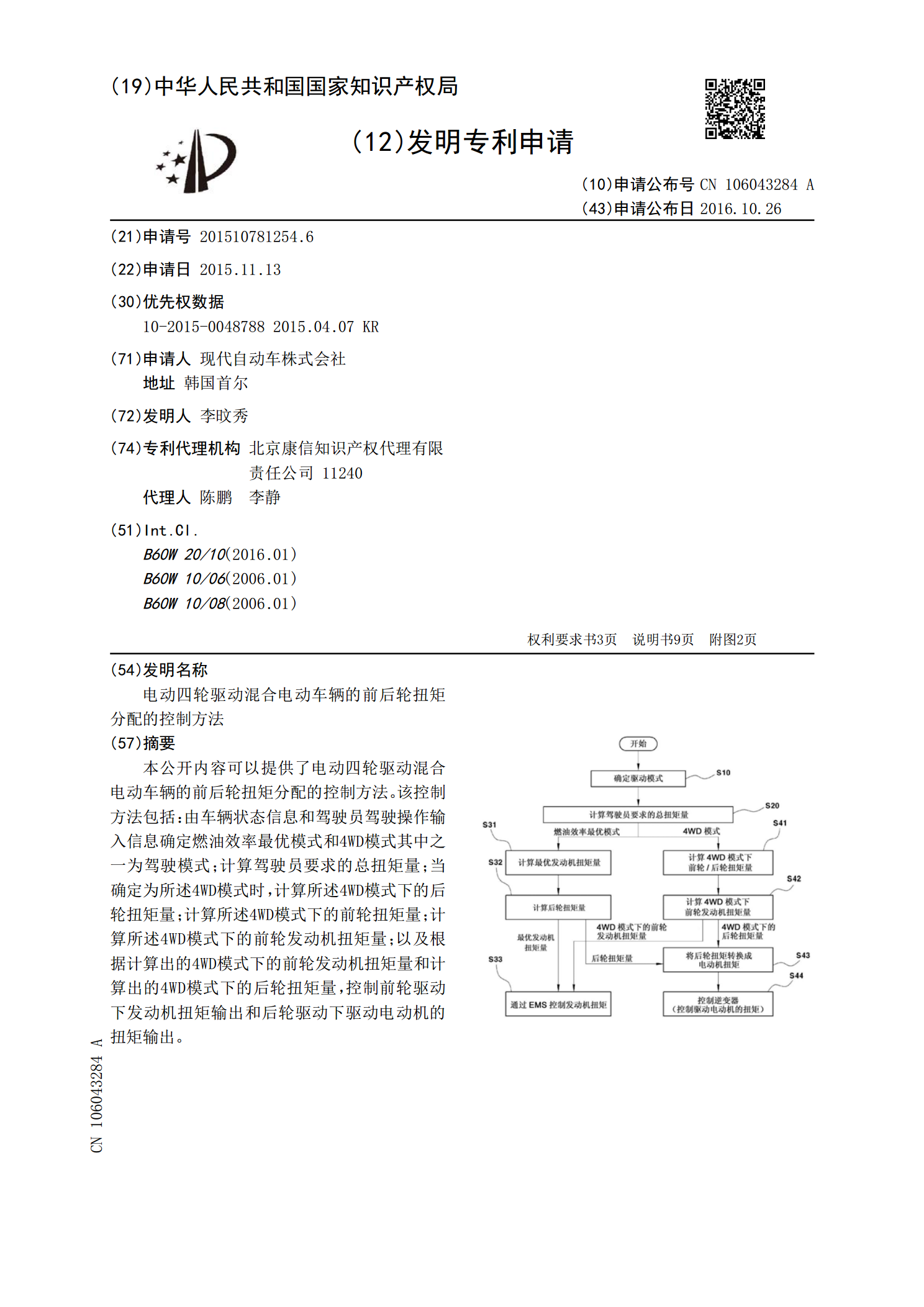
本公开内容可以提供了电动四轮驱动混合电动车辆的前后轮扭矩分配的控制方法。该控制方法包括:由车辆状态信息和驾驶员驾驶操作输入信息确定燃油效率最优模式和4WD模式其中之一为驾驶模式;计算驾驶员要求的总扭矩量;当确定为所述4WD模式时,计算所述4WD模式下的后轮扭矩量;计算所述4WD模式下的前轮扭矩量;计算所述4WD模式下的前轮发动机扭矩量;以及根据计算出的4WD模式下的前轮发动机扭矩量和计算出的4WD模式下的后轮扭矩量,控制前轮驱动下发动机扭矩输出和后轮驱动下驱动电动机的扭矩输出。
用于控制四轮驱动车辆的前轮和后轮扭矩分配的方法和装置.pdf
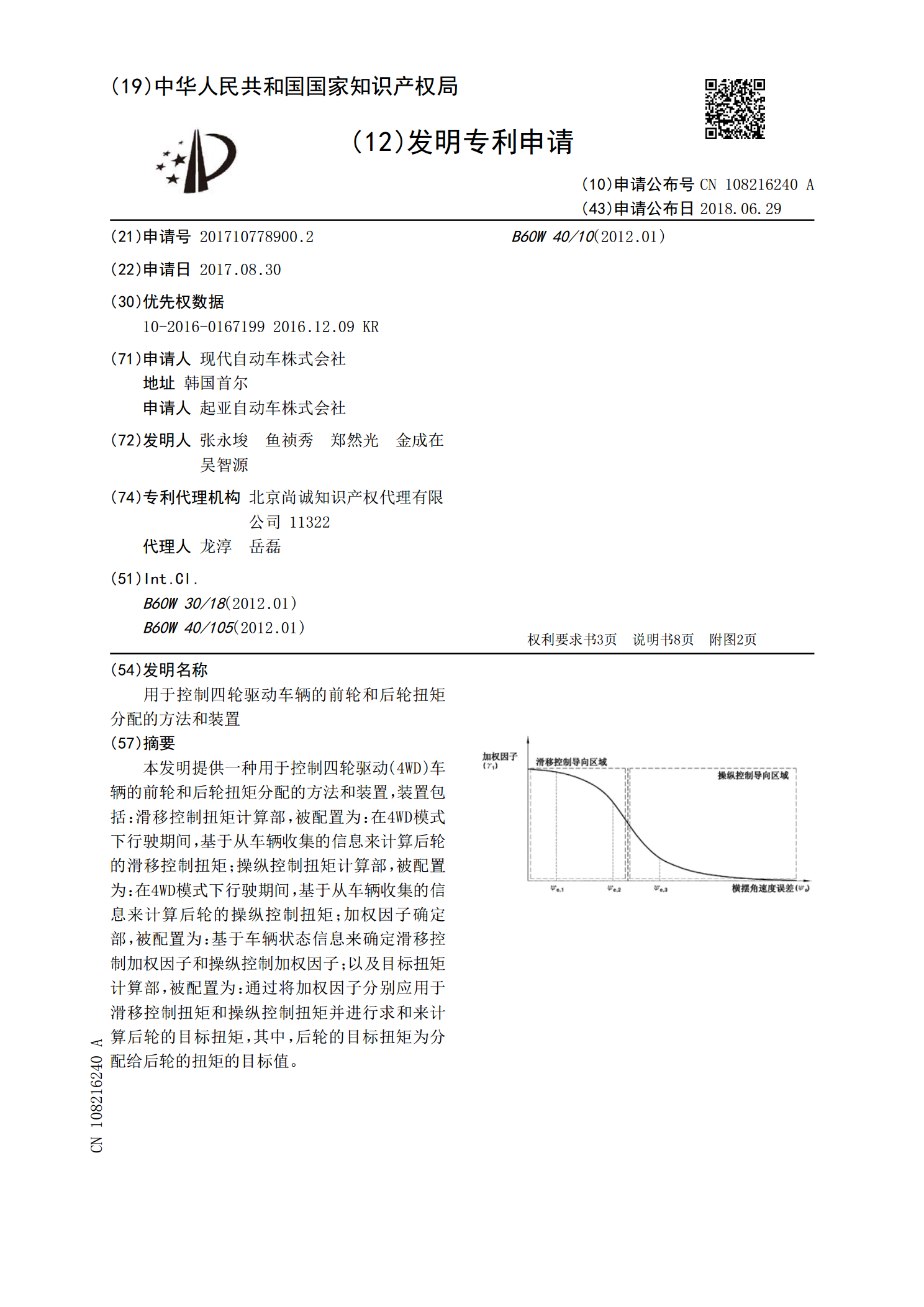
本发明提供一种用于控制四轮驱动(4WD)车辆的前轮和后轮扭矩分配的方法和装置,装置包括:滑移控制扭矩计算部,被配置为:在4WD模式下行驶期间,基于从车辆收集的信息来计算后轮的滑移控制扭矩;操纵控制扭矩计算部,被配置为:在4WD模式下行驶期间,基于从车辆收集的信息来计算后轮的操纵控制扭矩;加权因子确定部,被配置为:基于车辆状态信息来确定滑移控制加权因子和操纵控制加权因子;以及目标扭矩计算部,被配置为:通过将加权因子分别应用于滑移控制扭矩和操纵控制扭矩并进行求和来计算后轮的目标扭矩,其中,后轮的目标扭矩为分配

四轮驱动混合动力车辆前后轮力矩分配控制方法.pdf
本发明是有关一种四轮驱动混合动力车辆前后轮力矩分配控制方法,包括:步骤S1确定驾驶员请求力矩。步骤S2包括同步的步骤S2A、步骤S2B及步骤2C;步骤S2A依据车辆动力传动系统最佳效率原则将驾驶员请求力矩在发动机和电机间分配;步骤S2B依据车辆稳定性原则将驾驶员请求力矩在前后轮间分配;步骤S2C依据车辆稳定性原则限制后轮力矩分配。步骤S3综合步骤2A的最佳效率力矩分配、步骤2B确定的车辆稳定性前后轮力矩分配、和步骤2C的车辆稳定性后轮力矩分配上限,决定发动机力矩请求量、前轮电机力矩请求量和后轮电机力矩请求
电动四轮驱动车辆的控制方法以及电动四轮驱动车辆的控制装置.pdf
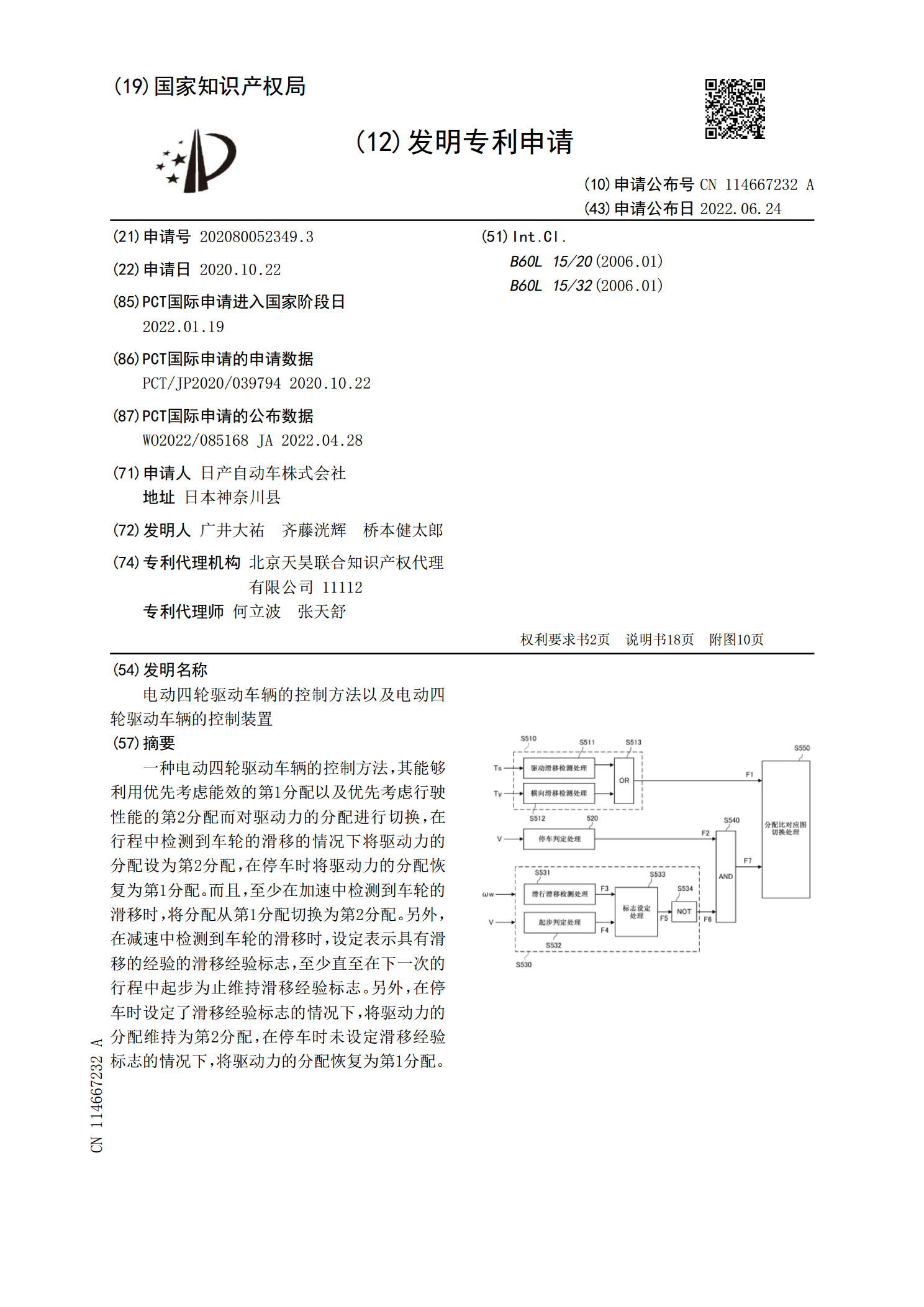
一种电动四轮驱动车辆的控制方法,其能够利用优先考虑能效的第1分配以及优先考虑行驶性能的第2分配而对驱动力的分配进行切换,在行程中检测到车轮的滑移的情况下将驱动力的分配设为第2分配,在停车时将驱动力的分配恢复为第1分配。而且,至少在加速中检测到车轮的滑移时,将分配从第1分配切换为第2分配。另外,在减速中检测到车轮的滑移时,设定表示具有滑移的经验的滑移经验标志,至少直至在下一次的行程中起步为止维持滑移经验标志。另外,在停车时设定了滑移经验标志的情况下,将驱动力的分配维持为第2分配,在停车时未设定滑移经验标志的
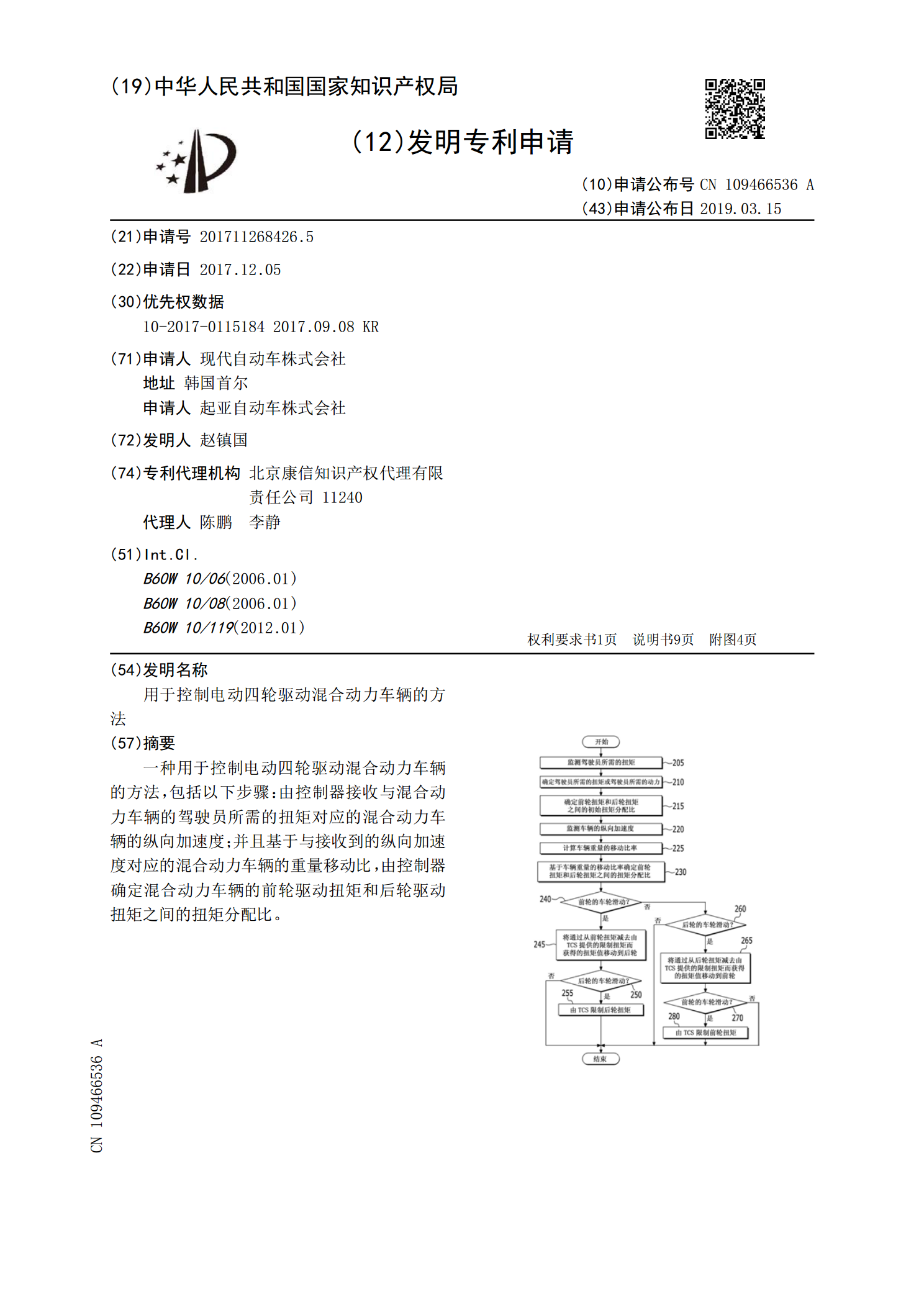
用于控制电动四轮驱动混合动力车辆的方法.pdf
一种用于控制电动四轮驱动混合动力车辆的方法,包括以下步骤:由控制器接收与混合动力车辆的驾驶员所需的扭矩对应的混合动力车辆的纵向加速度;并且基于与接收到的纵向加速度对应的混合动力车辆的重量移动比,由控制器确定混合动力车辆的前轮驱动扭矩和后轮驱动扭矩之间的扭矩分配比。