
用于控制四轮驱动车辆的前轮和后轮扭矩分配的方法和装置.pdf

是你****噩呀

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于控制四轮驱动车辆的前轮和后轮扭矩分配的方法和装置.pdf
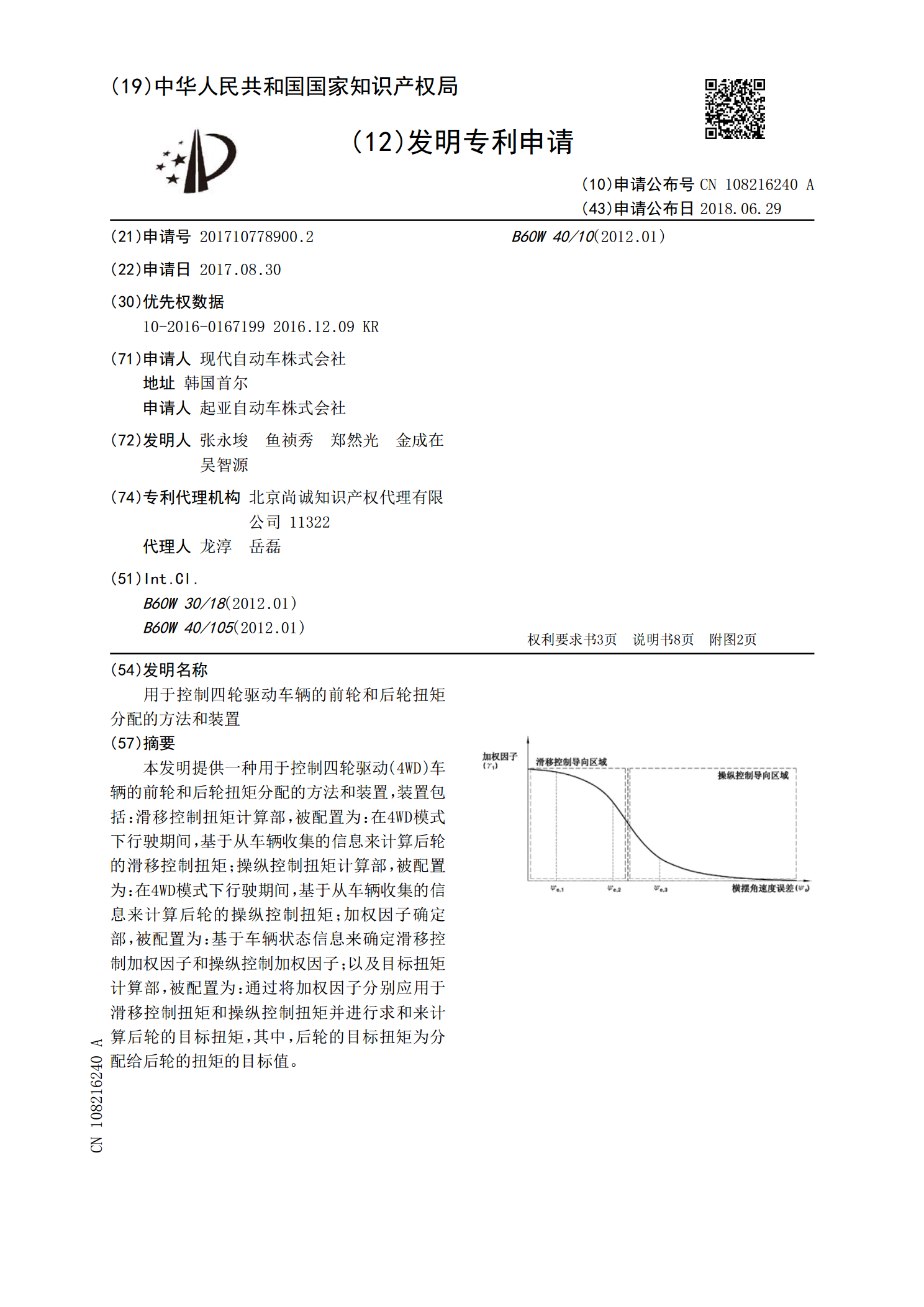
本发明提供一种用于控制四轮驱动(4WD)车辆的前轮和后轮扭矩分配的方法和装置,装置包括:滑移控制扭矩计算部,被配置为:在4WD模式下行驶期间,基于从车辆收集的信息来计算后轮的滑移控制扭矩;操纵控制扭矩计算部,被配置为:在4WD模式下行驶期间,基于从车辆收集的信息来计算后轮的操纵控制扭矩;加权因子确定部,被配置为:基于车辆状态信息来确定滑移控制加权因子和操纵控制加权因子;以及目标扭矩计算部,被配置为:通过将加权因子分别应用于滑移控制扭矩和操纵控制扭矩并进行求和来计算后轮的目标扭矩,其中,后轮的目标扭矩为分配

用于四轮驱动式机动车辆的扭矩分配控制方法和相应车辆.pdf
本发明涉及一种具有安装在两个轴(2FT,2RR)上的四个驱动轮(1a、1b、1c、1d)的机动车辆(Ve),它包括连接到第一轴上的分动器轴(8)以及能将一部分扭矩从分动器轴(8)传递到第二轴上的受控制的联轴器(9),用于确定两个轴各自的速度的装置以及能确定表征两个轴之间速度差的滑移值并能控制联轴器的扭矩分配控制系统(11)。该扭矩分配控制系统构造成控制联轴器(9),以便当在预定周期(Mintime)内平均滑移值超过阈值时抑制经由联轴器的任何扭矩传递。

控制四轮驱动车辆的前轮和后轮间的速度差的方法.pdf
本发明涉及一种用于控制四轮驱动机动车的前轴的车轮速度与后轴的车轮速度之间的速度差的方法。本发明的特征在于该方法包括以下步骤:根据车辆的速度确定初始速度差设定点(C初始),根据车辆的一个或多个运行参数确定一个或多个中间速度差设定点(Ci2,Ci3,Ci4);根据所述中间速度差设定点(Ci2,Ci3,Ci4)调制初始速度差设定点(C初始),从而获得最终速度差设定点(C最终);测量速度差,并且将所测量的速度差与最终速度差设定点(C最终)进行比较;以及控制所测量的速度差,以使所测量的速度差达到最终速度差设定点(C

四轮驱动车辆的扭矩分配控制装置.pdf
一种四轮驱动车辆的扭矩分配控制装置,可减少在四轮驱动车辆从减速状态或者惯性行驶状态转移到加速状态时的齿轮的齿音,并改善车辆的转向特性。目标分配扭矩计算单元根据估计驱动扭矩计算部计算出的驱动扭矩计算分配给副驱动轮的目标分配扭矩,当目标分配扭矩是第1阈值以下、且目标分配扭矩的时间增加率是第2阈值以上时,离合器扭矩校正部向增加方向校正目标分配扭矩。由此,由于动力传递系的齿轮的齿隙的急剧消失和发动机转速的变动而产生的齿音可通过向动力传递系提供负载来抑制,并可迅速连接扭矩分配离合器来提高将驱动源的驱动扭矩分配给副驱

四轮驱动车辆的扭矩分配控制装置.pdf
一种四轮驱动车辆的扭矩分配控制装置,在四轮驱动车辆起步时,防止副驱动轮发生过度的实际驱动扭矩而使耐久性下降,不会有损车辆的起步性能。当LSD控制部(56)计算出的副驱动轮分配扭矩是预定值以上、左右的扭矩分配离合器的旋转差都是预定值以上、且车体速度传感器(52a)检测出的车体速度是预定值以下时,由于从发动机经由后差速齿轮(16)的左右的扭矩分配离合器传递到左右的副驱动轮的副驱动轮分配扭矩的上限值由离合器扭矩限制部(60)限制,因而在车辆起步时主驱动轮打滑时,可防止副驱动轮产生过大的实际驱动扭矩而使耐久性下降