
一种履带式磁吸附缆索检测机器人.pdf

秋花****姐姐


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种履带式磁吸附缆索检测机器人.pdf
本发明公开了一种履带式磁吸附缆索检测机器人,包括框架、V形橡胶履带、离合器、下降限速装置和至少两个V形负重轮。V形橡胶履带包覆在所有V形负重轮的外周,V形橡胶履带内封装有磁吸附单元。至少一个V形负重轮为驱动轮。下降限速装置通过离合器与其中一个V形负重轮相连接。框架包括对称设置在V形橡胶履带两侧的机架,每个机架均为两段式结构。采用上述结构后,结构紧凑、操作简便、越障能力强。V形橡胶履带能提高机器人防脱轨的能力;磁吸附单元封装在履带内,能缓冲与拉索表面的碰撞,同时磁吸附单元根据负重轮半径设计尺寸,可以避免履带
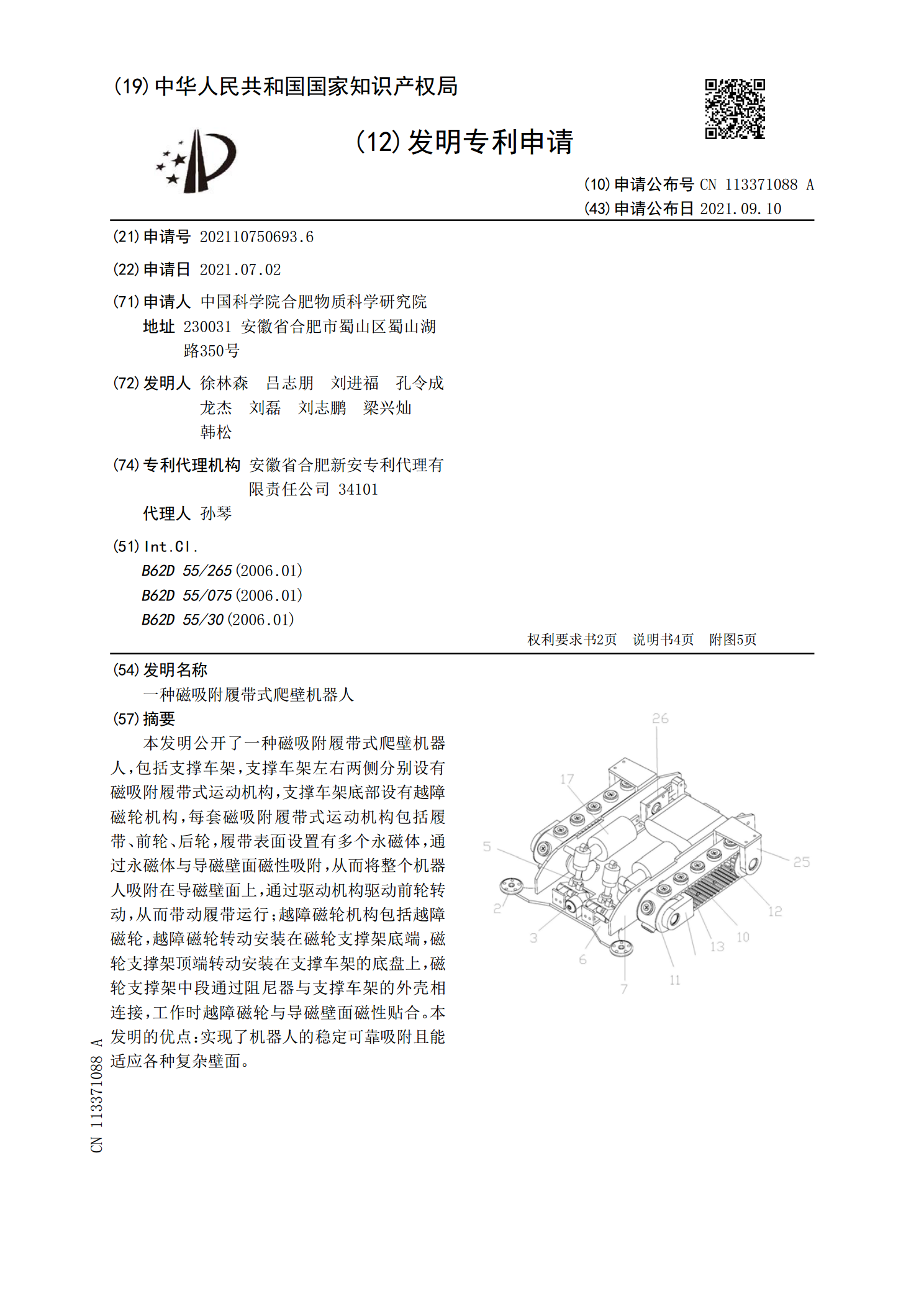
一种磁吸附履带式爬壁机器人.pdf
本发明公开了一种磁吸附履带式爬壁机器人,包括支撑车架,支撑车架左右两侧分别设有磁吸附履带式运动机构,支撑车架底部设有越障磁轮机构,每套磁吸附履带式运动机构包括履带、前轮、后轮,履带表面设置有多个永磁体,通过永磁体与导磁壁面磁性吸附,从而将整个机器人吸附在导磁壁面上,通过驱动机构驱动前轮转动,从而带动履带运行;越障磁轮机构包括越障磁轮,越障磁轮转动安装在磁轮支撑架底端,磁轮支撑架顶端转动安装在支撑车架的底盘上,磁轮支撑架中段通过阻尼器与支撑车架的外壳相连接,工作时越障磁轮与导磁壁面磁性贴合。本发明的优点:实

磁吸附履带式攀爬钢缆机器人的分析与研究.docx
磁吸附履带式攀爬钢缆机器人的分析与研究磁吸附陀螺式攀爬钢缆机器人的分析与研究摘要:随着建筑物和桥梁的高度不断增加,人们对于可靠而高效的维护和检查方法的需求也越来越迫切。而传统的攀爬机器人因为其自身在复杂环境中的稳定性和可靠性问题,已经无法满足这种需求。本文提出一种基于磁吸附陀螺式设计的攀爬机器人,主要分析了其原理和结构,并进行了相关验证和试验。结果显示,该机器人在攀爬过程中表现出良好的稳定性和可靠性,能够成功完成各类维护和检查任务。1.引言近年来,随着城市化进程的快速推进和建筑物高度的不断增加,对于高处的
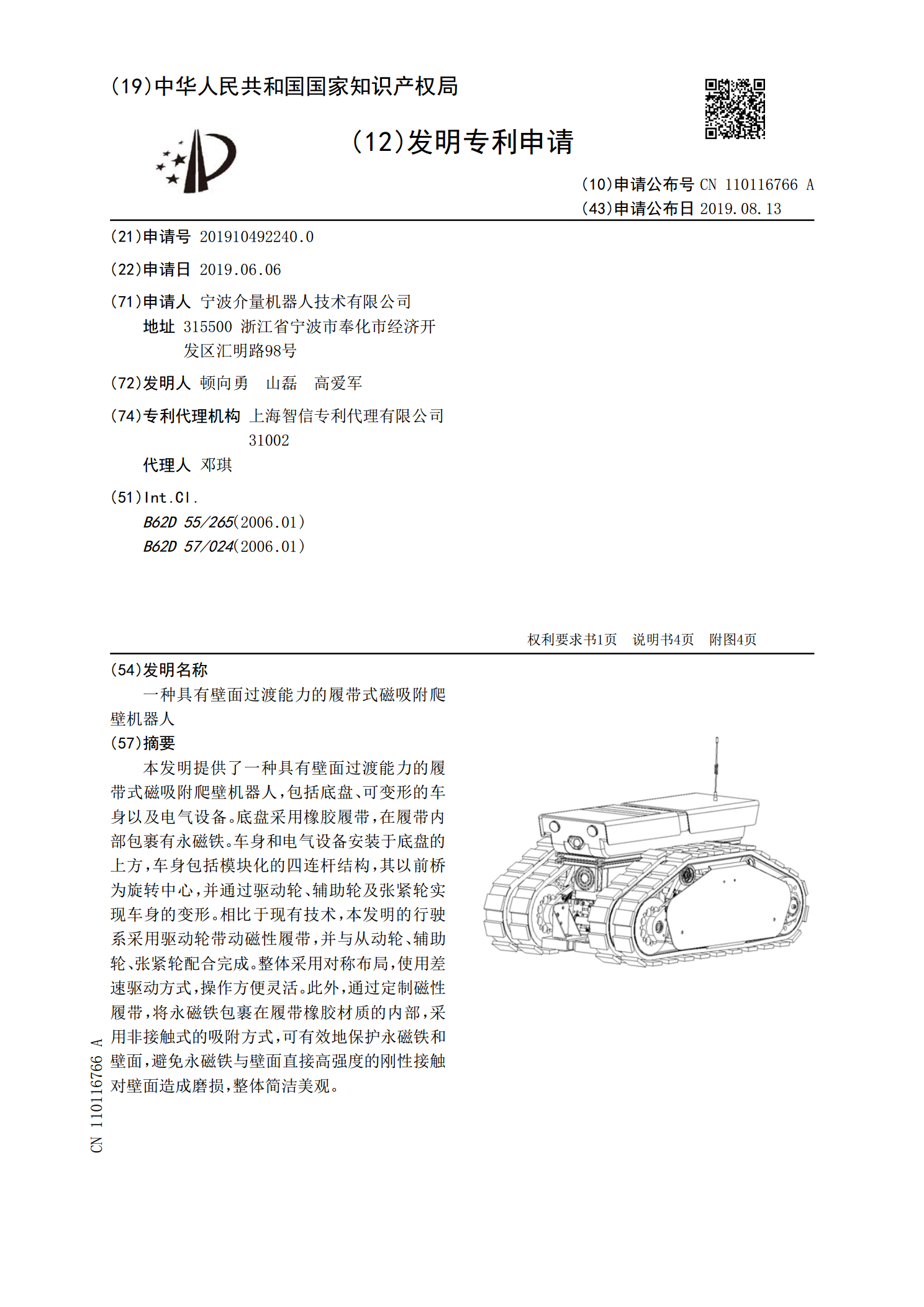
一种具有壁面过渡能力的履带式磁吸附爬壁机器人.pdf
本发明提供了一种具有壁面过渡能力的履带式磁吸附爬壁机器人,包括底盘、可变形的车身以及电气设备。底盘采用橡胶履带,在履带内部包裹有永磁铁。车身和电气设备安装于底盘的上方,车身包括模块化的四连杆结构,其以前桥为旋转中心,并通过驱动轮、辅助轮及张紧轮实现车身的变形。相比于现有技术,本发明的行驶系采用驱动轮带动磁性履带,并与从动轮、辅助轮、张紧轮配合完成。整体采用对称布局,使用差速驱动方式,操作方便灵活。此外,通过定制磁性履带,将永磁铁包裹在履带橡胶材质的内部,采用非接触式的吸附方式,可有效地保护永磁铁和壁面,避
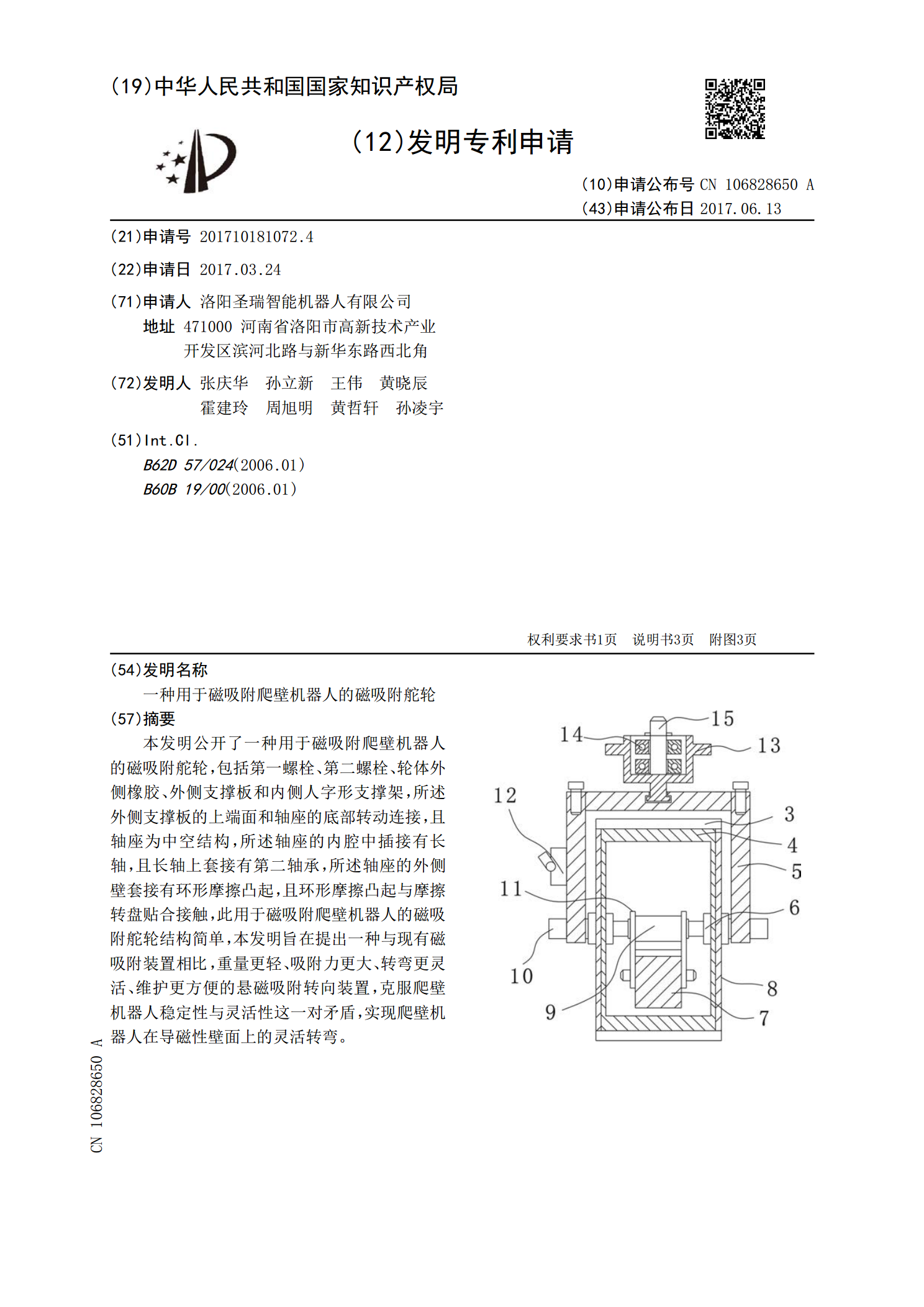
一种用于磁吸附爬壁机器人的磁吸附舵轮.pdf
本发明公开了一种用于磁吸附爬壁机器人的磁吸附舵轮,包括第一螺栓、第二螺栓、轮体外侧橡胶、外侧支撑板和内侧人字形支撑架,所述外侧支撑板的上端面和轴座的底部转动连接,且轴座为中空结构,所述轴座的内腔中插接有长轴,且长轴上套接有第二轴承,所述轴座的外侧壁套接有环形摩擦凸起,且环形摩擦凸起与摩擦转盘贴合接触,此用于磁吸附爬壁机器人的磁吸附舵轮结构简单,本发明旨在提出一种与现有磁吸附装置相比,重量更轻、吸附力更大、转弯更灵活、维护更方便的悬磁吸附转向装置,克服爬壁机器人稳定性与灵活性这一对矛盾,实现爬壁机器人在导磁