
磁吸附履带式攀爬钢缆机器人的分析与研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

磁吸附履带式攀爬钢缆机器人的分析与研究.docx
磁吸附履带式攀爬钢缆机器人的分析与研究磁吸附陀螺式攀爬钢缆机器人的分析与研究摘要:随着建筑物和桥梁的高度不断增加,人们对于可靠而高效的维护和检查方法的需求也越来越迫切。而传统的攀爬机器人因为其自身在复杂环境中的稳定性和可靠性问题,已经无法满足这种需求。本文提出一种基于磁吸附陀螺式设计的攀爬机器人,主要分析了其原理和结构,并进行了相关验证和试验。结果显示,该机器人在攀爬过程中表现出良好的稳定性和可靠性,能够成功完成各类维护和检查任务。1.引言近年来,随着城市化进程的快速推进和建筑物高度的不断增加,对于高处的

磁吸附攀爬机器人.pdf
本发明公开了一种磁吸附攀爬机器人,包括磁性车轮、驱动车体和转向车体,所述驱动车体包括驱动车体主体和动力驱动装置,两个磁性车轮安装在驱动车体主体上,通过动力驱动装置驱动,作为驱动后轮;所述转向车体包括转向车体主体和转向装置,两个磁性车轮安装在转向车体主体上,通过转向装置控制转向,作为转向前轮,所述驱动车体主体和转向车体主体之间通过一个具体转动自由度的悬挂装置相连。本发明将永磁体创新的与车轮结合,实现了车轮的稳定吸附,为后面的图像传输部件、机械臂部件、超声波探伤部件的正常工作创造了可能。

履带式爬壁机器人磁吸附单元优化设计与实验研究.docx
履带式爬壁机器人磁吸附单元优化设计与实验研究履带式爬壁机器人磁吸附单元优化设计与实验研究摘要:随着现代科技的快速发展,机器人技术在许多领域发挥着重要作用。履带式爬壁机器人作为一种特殊类型的机器人,具有较大的市场潜力和广泛的应用前景。然而,目前履带式爬壁机器人在垂直爬升过程中存在着一些问题,例如对于平滑表面的附着性能不佳,容易掉落。为了解决这些问题,本研究对履带式爬壁机器人的磁吸附单元进行了优化设计并进行了实验研究。关键词:履带式爬壁机器人;磁吸附;优化设计;实验研究第一部分:引言机器人技术的发展给人们的生

一种履带式磁吸附缆索检测机器人.pdf
本发明公开了一种履带式磁吸附缆索检测机器人,包括框架、V形橡胶履带、离合器、下降限速装置和至少两个V形负重轮。V形橡胶履带包覆在所有V形负重轮的外周,V形橡胶履带内封装有磁吸附单元。至少一个V形负重轮为驱动轮。下降限速装置通过离合器与其中一个V形负重轮相连接。框架包括对称设置在V形橡胶履带两侧的机架,每个机架均为两段式结构。采用上述结构后,结构紧凑、操作简便、越障能力强。V形橡胶履带能提高机器人防脱轨的能力;磁吸附单元封装在履带内,能缓冲与拉索表面的碰撞,同时磁吸附单元根据负重轮半径设计尺寸,可以避免履带
一种磁吸附履带式爬壁机器人.pdf
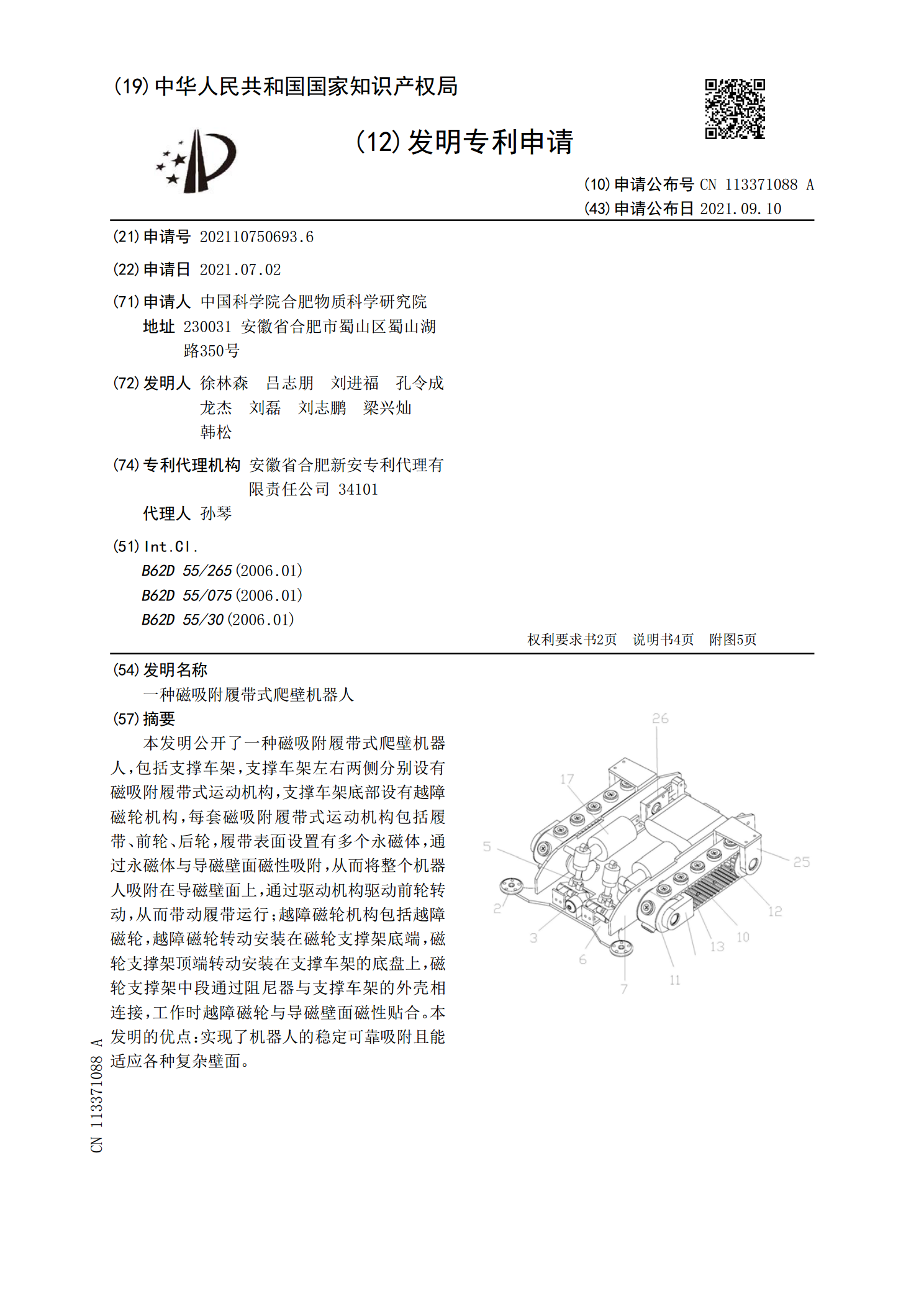
本发明公开了一种磁吸附履带式爬壁机器人,包括支撑车架,支撑车架左右两侧分别设有磁吸附履带式运动机构,支撑车架底部设有越障磁轮机构,每套磁吸附履带式运动机构包括履带、前轮、后轮,履带表面设置有多个永磁体,通过永磁体与导磁壁面磁性吸附,从而将整个机器人吸附在导磁壁面上,通过驱动机构驱动前轮转动,从而带动履带运行;越障磁轮机构包括越障磁轮,越障磁轮转动安装在磁轮支撑架底端,磁轮支撑架顶端转动安装在支撑车架的底盘上,磁轮支撑架中段通过阻尼器与支撑车架的外壳相连接,工作时越障磁轮与导磁壁面磁性贴合。本发明的优点:实