
用于检查机动车的车轮悬架的方法和装置.pdf

Jo****63


1/9

2/9

3/9
4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于检查机动车的车轮悬架的方法和装置.pdf
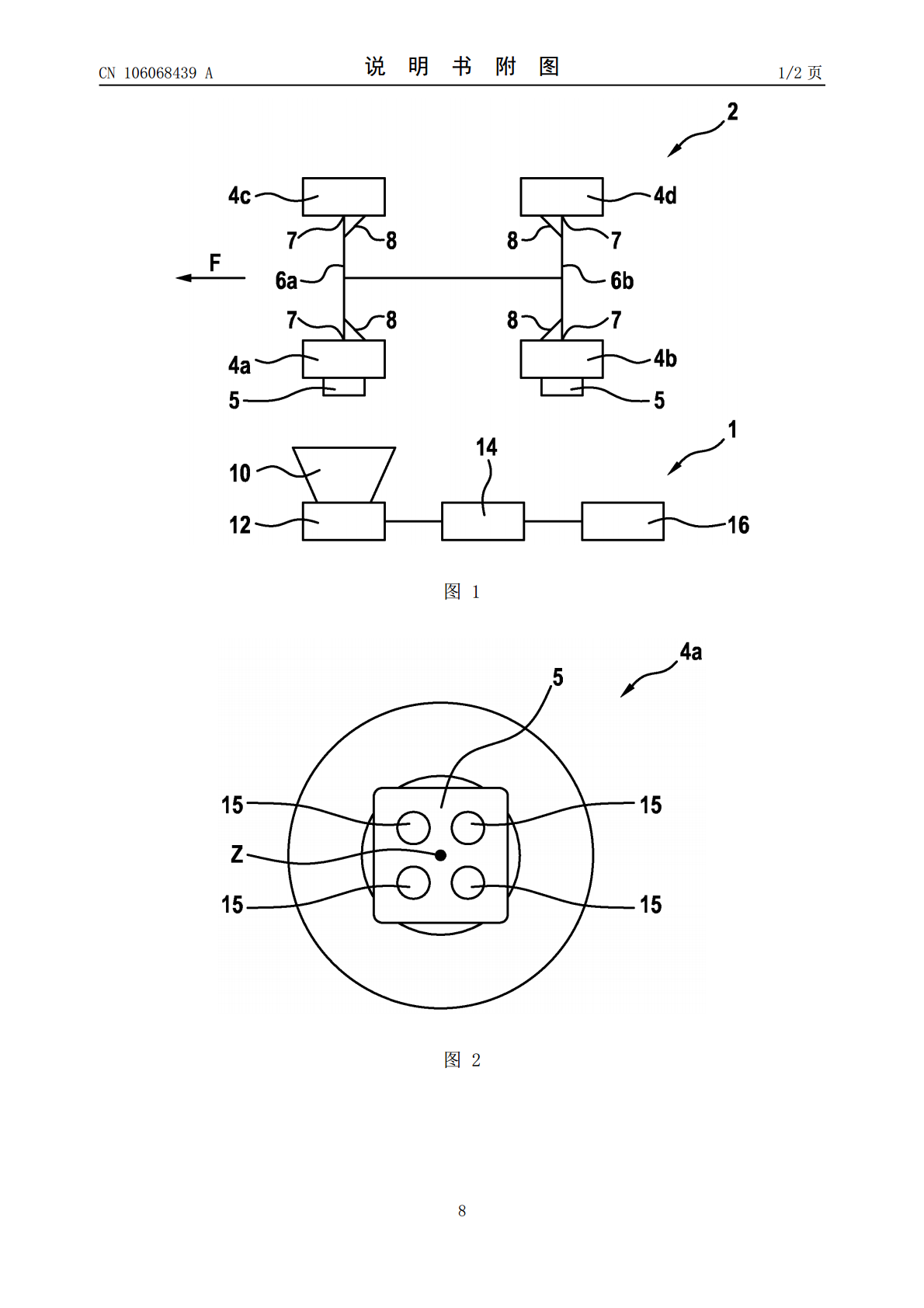
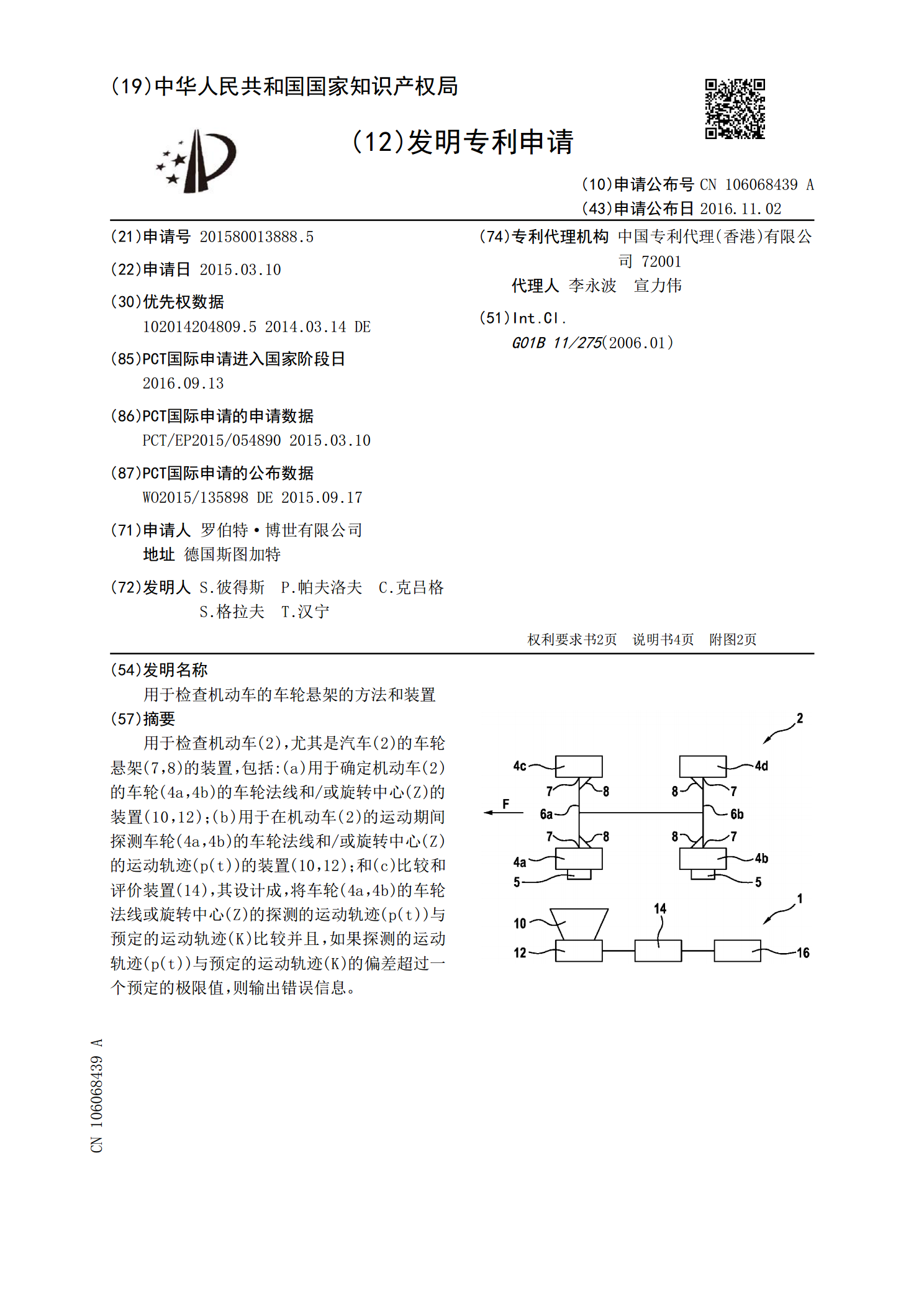
用于检查机动车(2),尤其是汽车(2)的车轮悬架(7,8)的装置,包括:(a)用于确定机动车(2)的车轮(4a,4b)的车轮法线和/或旋转中心(Z)的装置(10,12);(b)用于在机动车(2)的运动期间探测车轮(4a,4b)的车轮法线和/或旋转中心(Z)的运动轨迹(p(t))的装置(10,12);和(c)比较和评价装置(14),其设计成,将车轮(4a,4b)的车轮法线或旋转中心(Z)的探测的运动轨迹(p(t))与预定的运动轨迹(K)比较并且,如果探测的运动轨迹(p(t))与预定的运动轨迹(K)的偏差超过

用于机动车的车轮悬架装置的扭转弹簧组件以及用于机动车的车桥的车轮的车轮悬架装置.pdf
本发明涉及一种用于机动车的车轮悬架装置(100)的扭转弹簧组件(10),包括彼此同轴地布置的两根扭杆(12、14)以及与两根同轴的扭杆(12、14)轴线平行地布置的、可通过支承部位(26)支承在机动车车身上的弹簧元件(16),径向靠外的扭杆(12)可支承在机动车车身侧、并且与可固定在车轮引导元件上的从动杆(22)以不能相对转动的方式连接,径向靠内的扭杆(14)以不能相对转动的方式与靠外的扭杆(12)连接、并且通过耦联部(24)以不能相对转动的方式与弹簧元件(16)连接。根据本发明,使弹簧元件(16)支承在

用于机动车轮悬架的弹簧装置.pdf
本发明涉及一种用于机动车的轮悬架的车桥调节器,包括扭杆弹簧(22),所述扭杆弹簧的预载能通过一扭转调节器(28)调节,其中扭杆弹簧(22)在车轮侧作用到从动杆(38)上,该从动杆通过——尤其竖立的——连接杆(40)铰接在轮悬架的车轮导向元件(12)上,该连接杆(40)通过铰接装置(42)与从动杆(38)并与车轮导向元件(12)连接。根据本发明,连接杆(40)实施成具有特定弹簧刚度的弹簧。

用于机动车轮悬架结构的调整装置.pdf
本发明涉及一种用于机动车的轮悬架结构的调整装置,包括至少一个电机(26),借助所述电机经变速传动机构(22)能使作用在所述轮悬架结构的轮引导元件上的扭杆(12)预张紧,其中,所述电机(26)布置成与所述扭杆(12)相距一径向间距(r)。根据本发明,所述电机(26)经中间传动机构(28)输出到所述变速传动机构(22),所述变速传动机构布置成与所述扭杆(12)同轴。

用于机动车的车轮悬架的弹性装置.pdf
本发明涉及一种弹性装置,用于机动车的车轮悬架,所述弹性装置具有扭杆弹簧(22),所述扭杆弹簧在其预应力方面可通过执行器(28)调节,其中,横向延伸的扭杆弹簧(22)尤其是一直延伸到接近车辆中心(30)并且在车轮侧作用在输出杠杆(38)上,所述输出杠杆总是间接或直接地铰接在所述车轮悬架的车轮导向元件(12)上。根据本发明,至少所述输出杠杆(38)构造成弹簧刚度确定的弯曲弹簧。