
精确定位摄像装置.pdf

一吃****成益

1/10
2/10
3/10

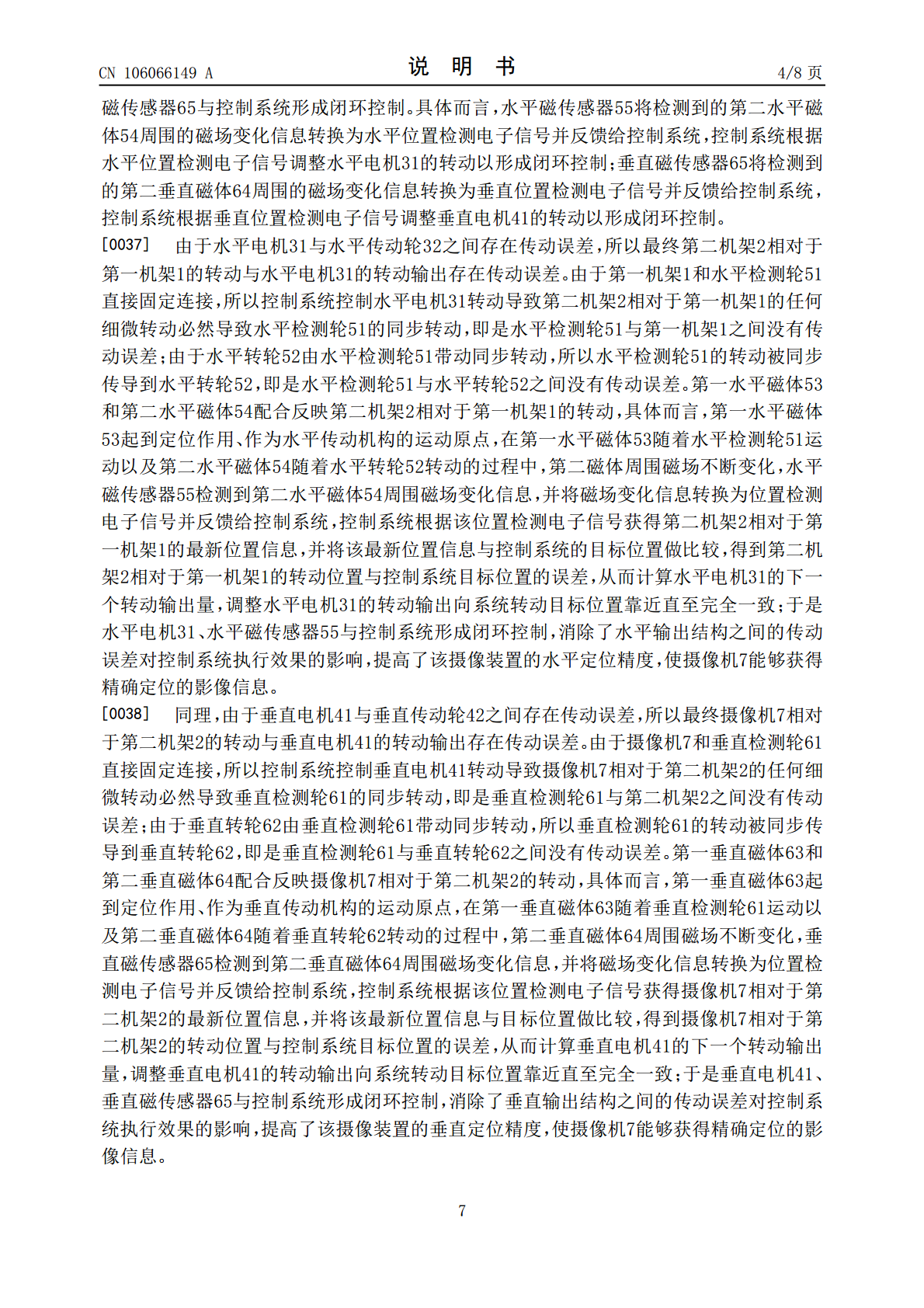
4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

精确定位摄像装置.pdf
本发明公开了一种精确定位摄像装置,包括第一机架、第二机架、摄像机、控制系统、水平驱动机构和垂直驱动机构,还包括:与第一机架连接的水平检测轮、设在水平检测轮或水平传动轮上的第一水平磁体、由水平检测轮带动的水平转轮、设在水平转轮上的第二水平磁体、水平磁传感器、与摄像机转轴连接的垂直检测轮、设在垂直检测轮或垂直传动轮上的第一垂直磁体、由垂直检测轮带动的垂直转轮、设在第二垂直上的第二垂直磁体以及垂直磁传感器;水平驱动机构、水平磁传感器与控制系统形成闭环控制,垂直驱动机构、垂直磁传感器与控制系统形成闭环控制,提高了

精确定位货叉装置.pdf
本发明提供一种精确定位货叉装置。其中,精确定位货叉装置包括:载货台、伸缩货叉模组、检测机构以及驱动机构;伸缩货叉模组左右对称地设置于载货台上;检测机构包括:左右对称设置于载货台上的检测单元,任一检测单元包括:相机和/或测距传感器;精确定位货叉装置的控制系统能够接收相机反馈的图像数据以及测距传感器反馈的距离数据;且驱动机构根据图像数据和距离数据驱动伸缩货叉模组进行动作。本发明的精确定位货叉装置在作业时,采用相机和测距传感器构成的检测机构对货物的位置及距离进行精确识别,并根据识别的结果控制伸缩货叉模组动作,使

论转动装置的精确定位.doc
论转动装置的精确定位摘要:在各行各业中,随着技术的进步和科技的发展,系统对转动装置的定位要求越来越高,电机,阀门,电动蝶阀,伺服电机在生产中的位置定位要求越来越精确,随着PLC技术的进步,仪表行业通讯的发展,如今许多位置精确定位已能在生产中得到应用。关键词:电机,阀门,电动蝶阀,PLC,伺服电机,智能电气阀门定位器,电气,变频器。转动装置的定位方法转动装置在机械中有转动和反馈,机械定位在电机轴承中加制动闸阀,可以有效的定位,对于克服惯性有一定的效果。位置开关和光电接近开关的点开点关控制,编码器的脉冲控制。
轨道精确定位机构以及轨道精确运动装置.pdf
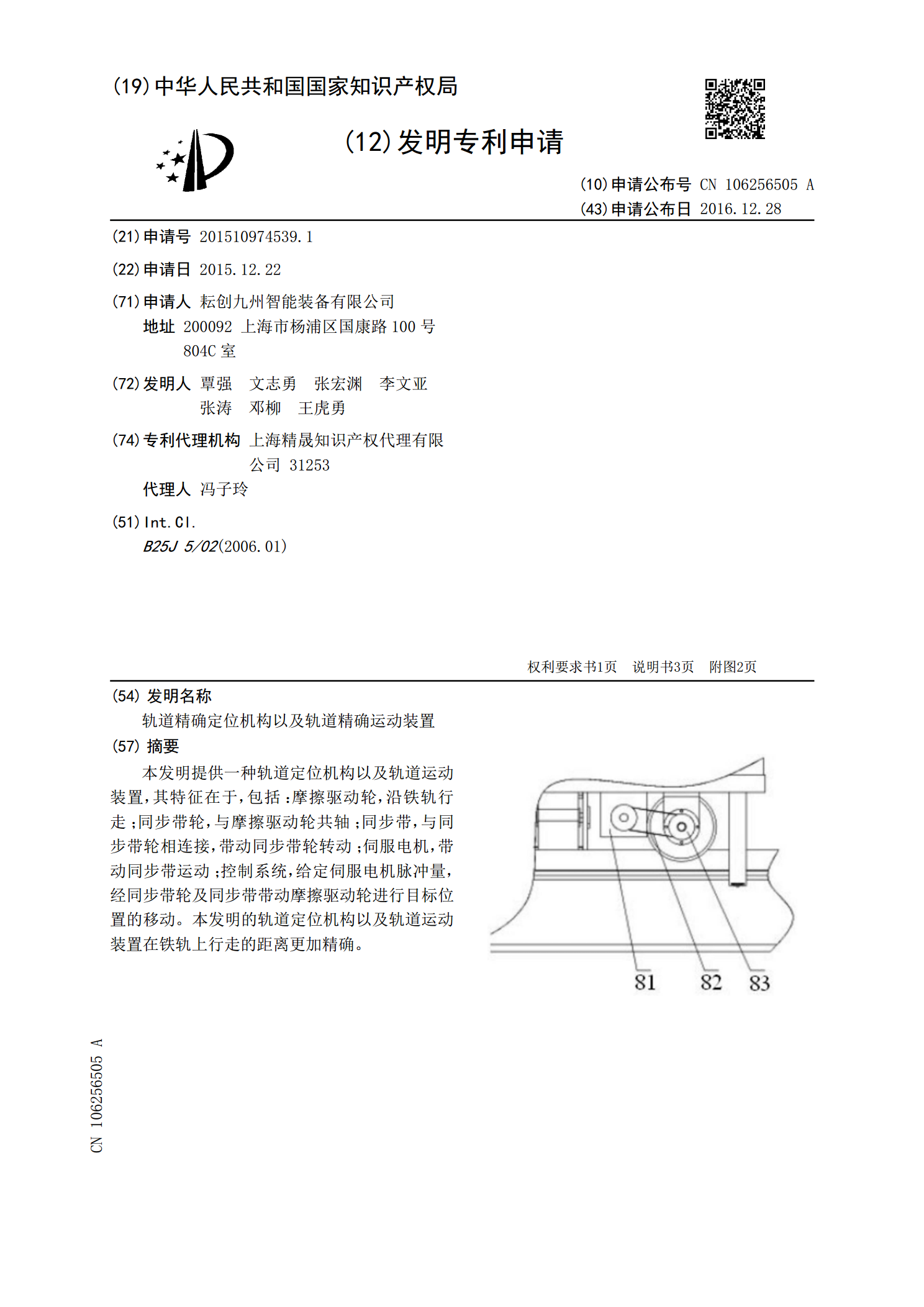
本发明提供一种轨道定位机构以及轨道运动装置,其特征在于,包括:摩擦驱动轮,沿铁轨行走;同步带轮,与摩擦驱动轮共轴;同步带,与同步带轮相连接,带动同步带轮转动;伺服电机,带动同步带运动;控制系统,给定伺服电机脉冲量,经同步带轮及同步带带动摩擦驱动轮进行目标位置的移动。本发明的轨道定位机构以及轨道运动装置在铁轨上行走的距离更加精确。

车轴轧制气动精确定位控制装置.pdf
车轴轧制气动精确定位控制装置,涉及车轴轧制设备的定位控制装置,特点是推进机构由推进气缸、推进活塞杆、套管和支架组成,推进活塞杆和套管首尾连接,套管为圆桶状,在套管的上面管壁上开一个窗口,套管固定在支架上,支架底部设导向滑槽或滚轮;夹紧机构由夹紧气缸和压块组成,夹紧气缸固定在套管的窗口上方,夹紧气缸的活塞杆可穿过套管的窗口进入套管的内部,在夹紧气缸的活塞杆的下端固定一个压板;定位机构由缓冲弹簧、定位杆和限位挡板组成,缓冲弹簧和定位杆固定在支架上,限位挡板固定在定位杆运动方向的正前方。其优点是:推进速度快,误