
智能工业机器人的减速器柔轮.pdf

是你****松呀

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
智能工业机器人的减速器柔轮.pdf
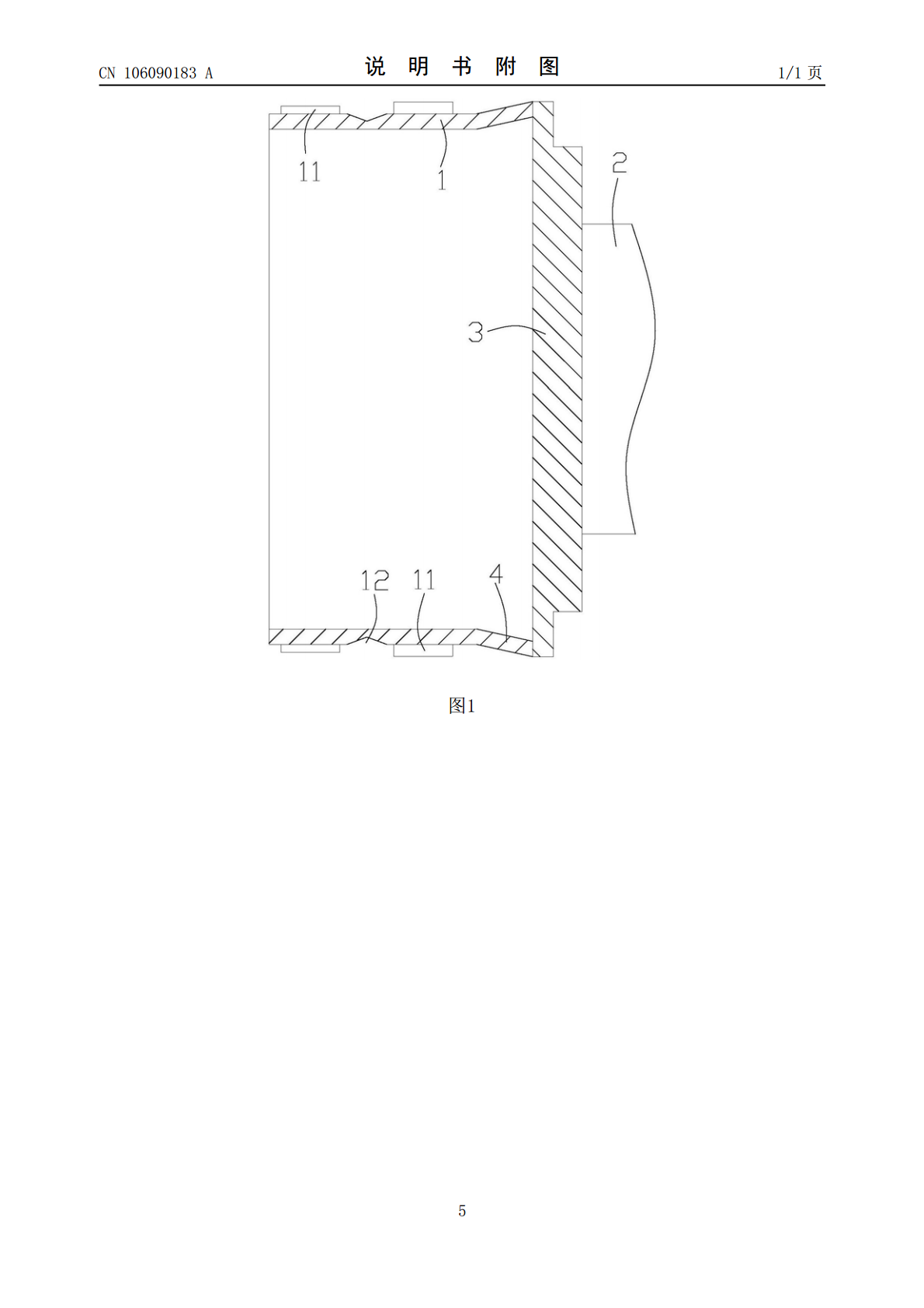
本发明涉及机器人减速器,具体说是智能工业机器人的减速器柔轮,包括可径向弯曲的轮体,该轮体一端开口,另一端设置有可连接输出轴的法兰,所述轮体外周壁成型有两排齿,该两排齿之间成型有环形凹槽;所述两排齿的齿数不相等;所述两排齿的齿顶圆直径不相等。本发明在柔轮外周成型两排不同齿数的齿,其可与相应的钢轮啮合,在传动过程中,可根基需要选择任意一种齿进行传动,从而达到实现传递两种传动比的目的,提高柔轮的适应性,满足机器人对传动比的要求。
机器人的减速器柔轮.pdf
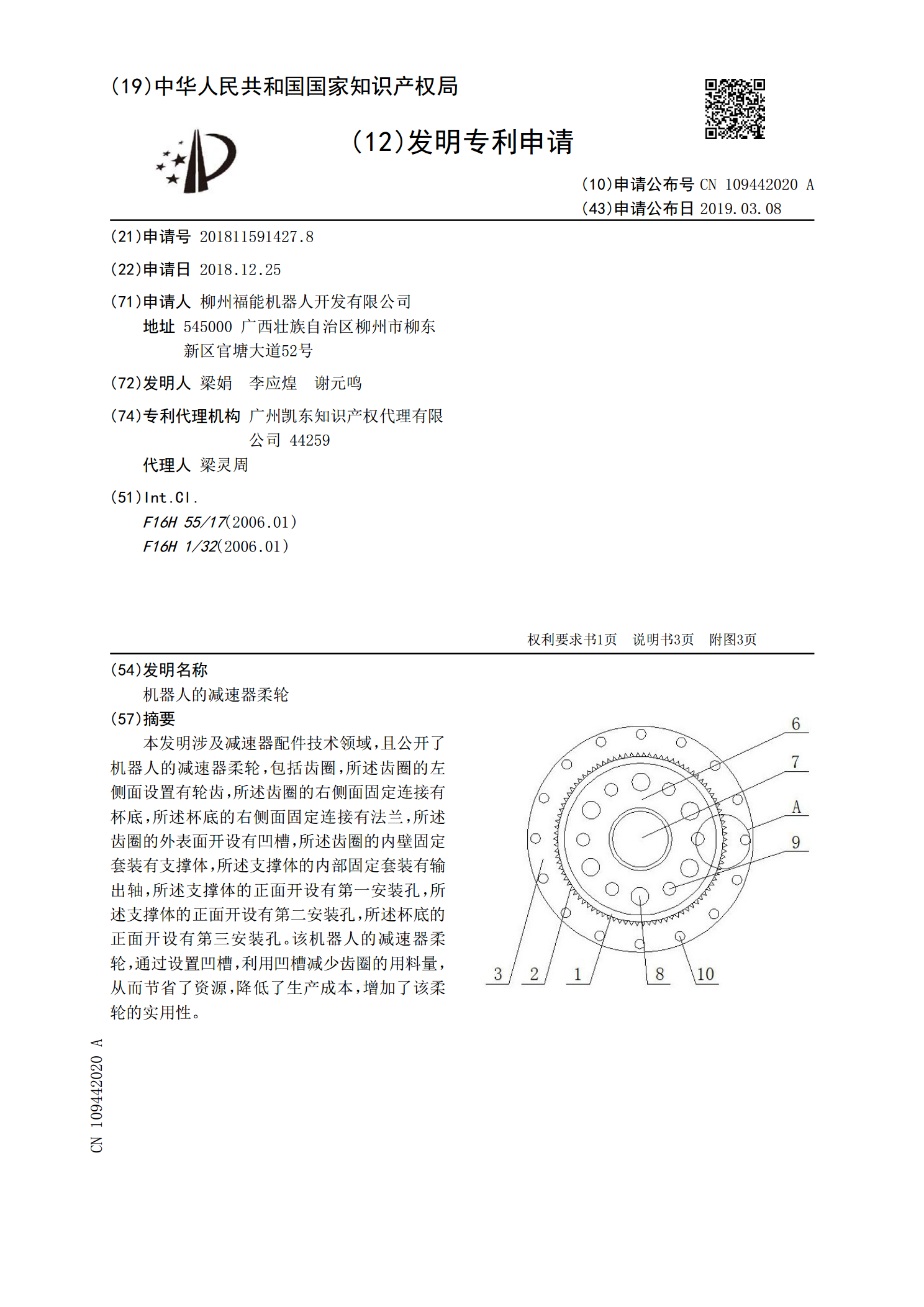
本发明涉及减速器配件技术领域,且公开了机器人的减速器柔轮,包括齿圈,所述齿圈的左侧面设置有轮齿,所述齿圈的右侧面固定连接有杯底,所述杯底的右侧面固定连接有法兰,所述齿圈的外表面开设有凹槽,所述齿圈的内壁固定套装有支撑体,所述支撑体的内部固定套装有输出轴,所述支撑体的正面开设有第一安装孔,所述支撑体的正面开设有第二安装孔,所述杯底的正面开设有第三安装孔。该机器人的减速器柔轮,通过设置凹槽,利用凹槽减少齿圈的用料量,从而节省了资源,降低了生产成本,增加了该柔轮的实用性。
一种工业机器人用的减速器柔轮装置.pdf
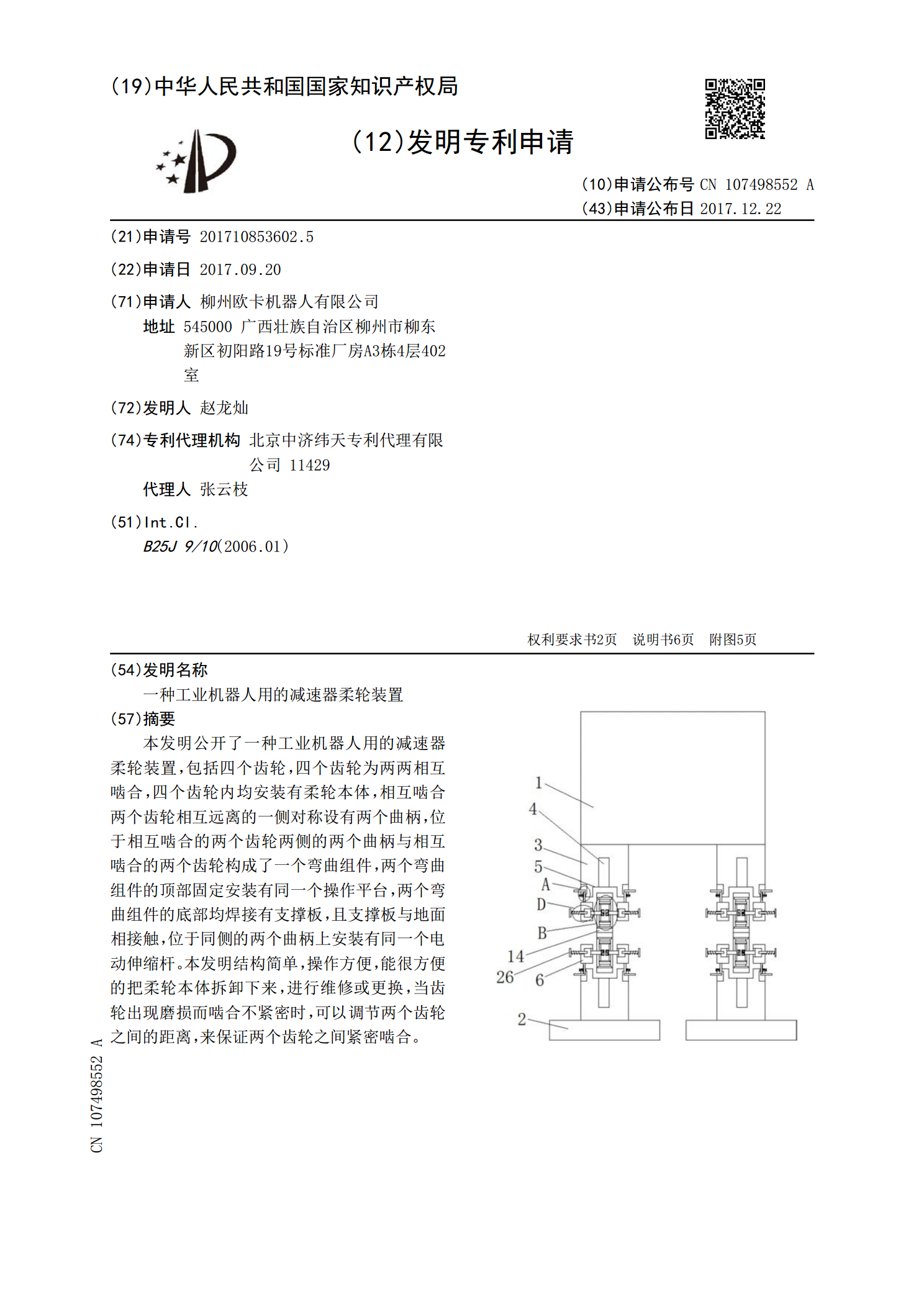
本发明公开了一种工业机器人用的减速器柔轮装置,包括四个齿轮,四个齿轮为两两相互啮合,四个齿轮内均安装有柔轮本体,相互啮合两个齿轮相互远离的一侧对称设有两个曲柄,位于相互啮合的两个齿轮两侧的两个曲柄与相互啮合的两个齿轮构成了一个弯曲组件,两个弯曲组件的顶部固定安装有同一个操作平台,两个弯曲组件的底部均焊接有支撑板,且支撑板与地面相接触,位于同侧的两个曲柄上安装有同一个电动伸缩杆。本发明结构简单,操作方便,能很方便的把柔轮本体拆卸下来,进行维修或更换,当齿轮出现磨损而啮合不紧密时,可以调节两个齿轮之间的距离,
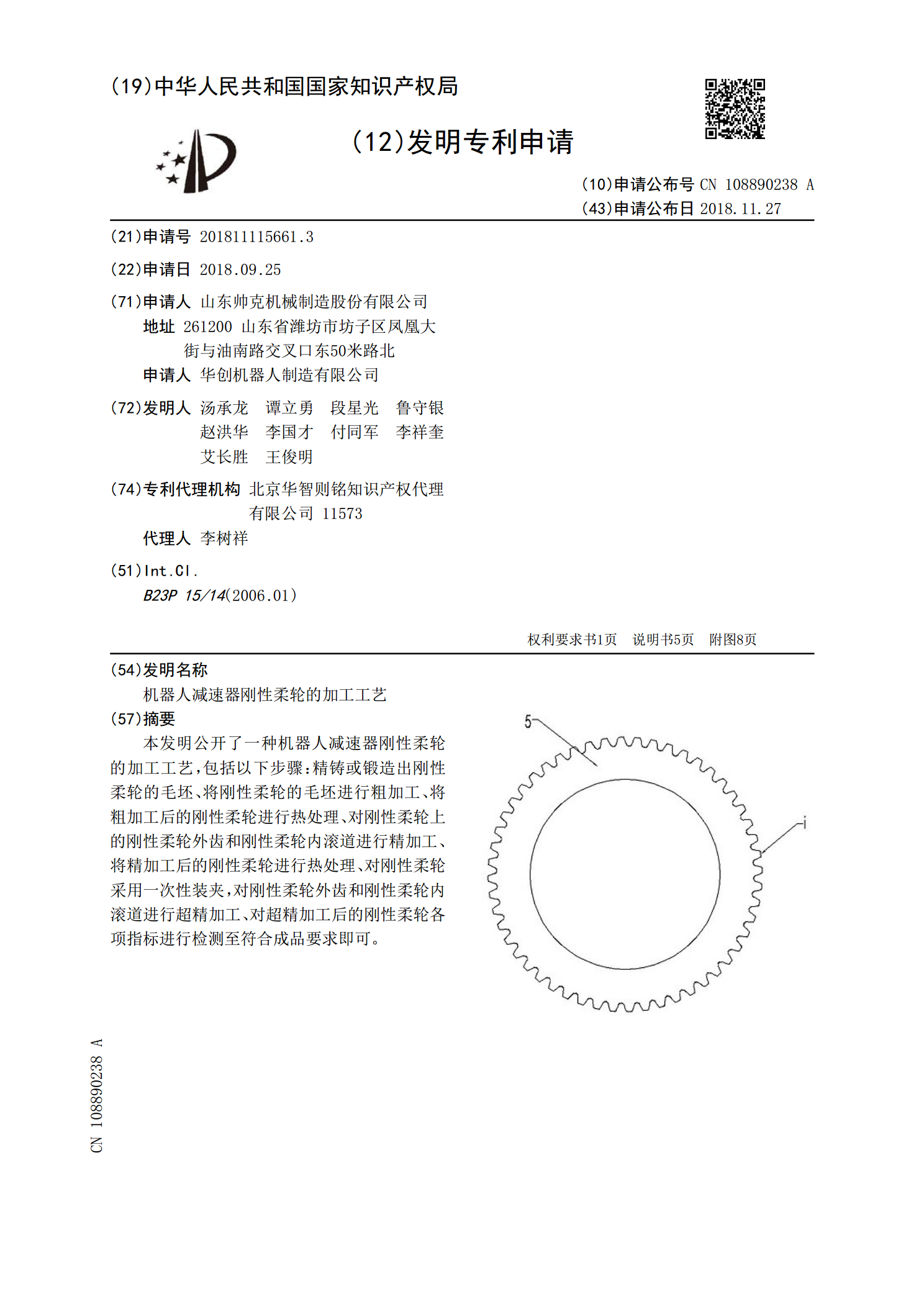
机器人减速器刚性柔轮的加工工艺.pdf
本发明公开了一种机器人减速器刚性柔轮的加工工艺,包括以下步骤:精铸或锻造出刚性柔轮的毛坯、将刚性柔轮的毛坯进行粗加工、将粗加工后的刚性柔轮进行热处理、对刚性柔轮上的刚性柔轮外齿和刚性柔轮内滚道进行精加工、将精加工后的刚性柔轮进行热处理、对刚性柔轮采用一次性装夹,对刚性柔轮外齿和刚性柔轮内滚道进行超精加工、对超精加工后的刚性柔轮各项指标进行检测至符合成品要求即可。
一种机器人减速器柔轮的加工方法.pdf
本发明涉及机器人,具体说是一种机器人减速器柔轮的加工方法,其包括在柔轮坯体的轴向中间位置沿周向车削一平底环形凹槽;再在平底环形凹槽槽底沿周向加工一环形V槽;在柔轮坯体外周位于环形凹槽一侧加工一排齿,在柔轮坯体外周位于环形凹槽另一侧加工另一排齿,每一齿的齿槽与环形凹槽相通,且槽底高于环形凹槽槽底或与环形凹槽槽底齐平;将柔轮坯体连接输出轴的一端加工成向外倾斜的缓冲段。本发明在柔轮外周加工成型两排不同齿数的齿,其可与相应的钢轮啮合,在传动过程中,可根据需要选择任意一种齿进行传动,从而达到实现传递两种传动比的目的