
一种位姿自适应机器人的焊接系统及位姿调整方法.pdf

王秋****哥哥

1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种位姿自适应机器人的焊接系统及位姿调整方法.pdf
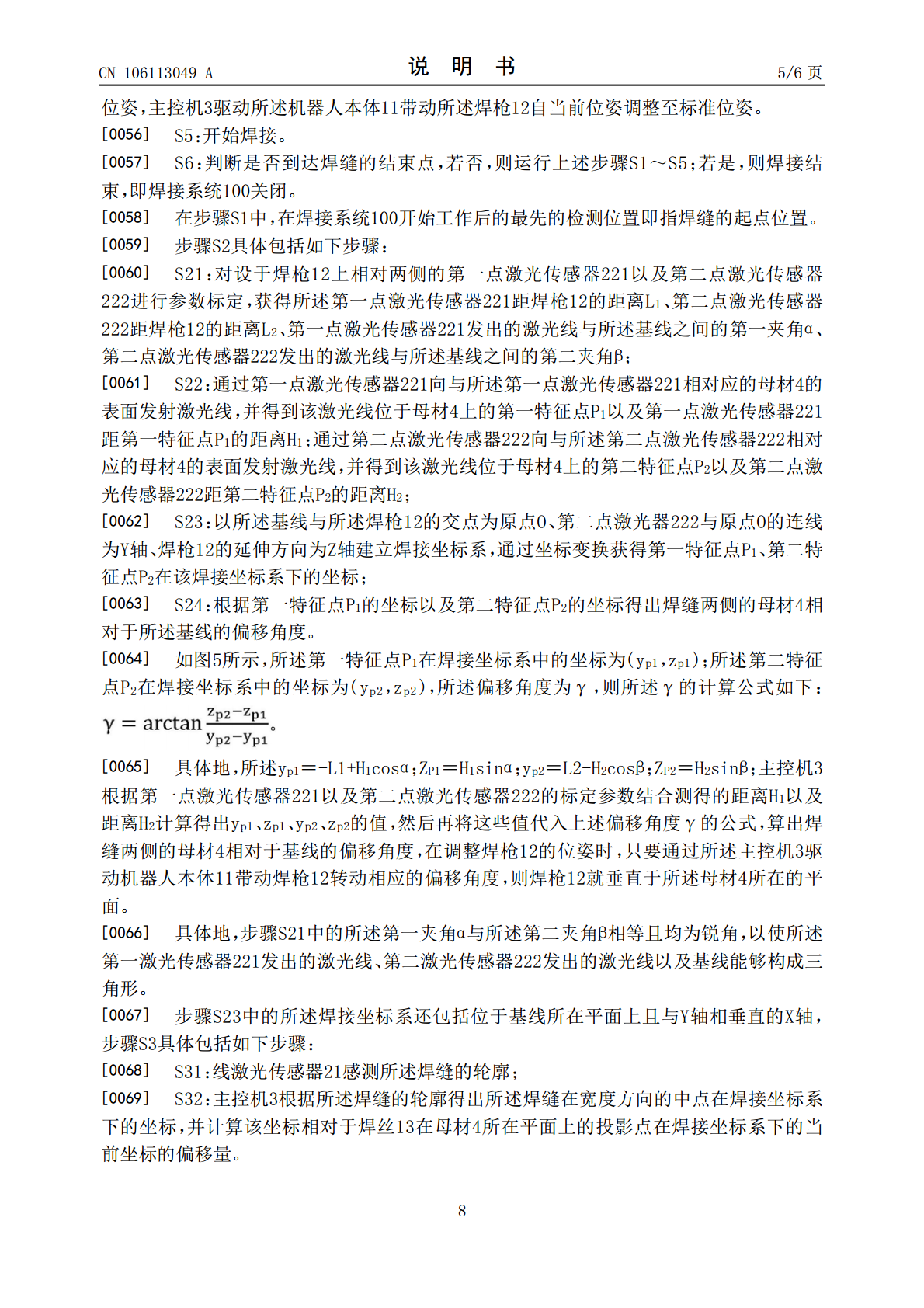
本发明提供了一种位姿自适应机器人的焊接系统及位姿调整方法,所述焊接系统包括焊接机器人、与所述焊接机器人通讯连接的主控机以及与所述主控机通讯连接的检测跟踪系统,所述检测跟踪系统包括设于焊枪上的用以检测焊缝的轮廓的线激光传感器以及设于焊枪上且位于焊枪的相对两侧的两个点激光传感器;所述主控机根据两个点激光传感器以及线激光传感器测得的数据得到所述焊接机器人的标准位姿并根据该标准位姿调整所述焊接机器人的位姿,从而在焊接进程中不断修正焊接机器人的位姿,使焊接机器人一直处于标准位姿下对工件进行焊接,能够适应焊接变形较大
一种挂弹车的位姿调整系统.pdf
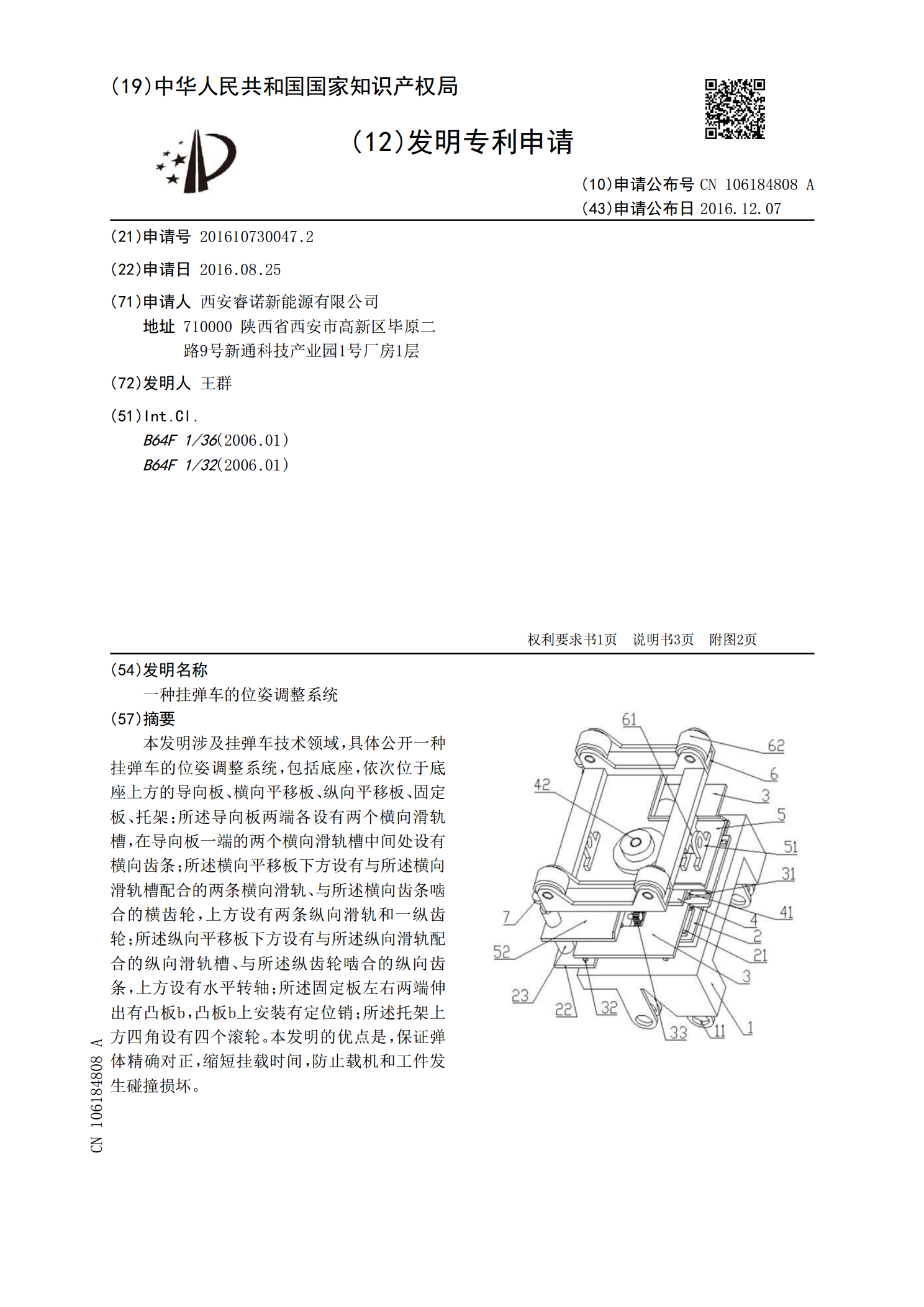
本发明涉及挂弹车技术领域,具体公开一种挂弹车的位姿调整系统,包括底座,依次位于底座上方的导向板、横向平移板、纵向平移板、固定板、托架;所述导向板两端各设有两个横向滑轨槽,在导向板一端的两个横向滑轨槽中间处设有横向齿条;所述横向平移板下方设有与所述横向滑轨槽配合的两条横向滑轨、与所述横向齿条啮合的横齿轮,上方设有两条纵向滑轨和一纵齿轮;所述纵向平移板下方设有与所述纵向滑轨配合的纵向滑轨槽、与所述纵齿轮啮合的纵向齿条,上方设有水平转轴;所述固定板左右两端伸出有凸板b,凸板b上安装有定位销;所述托架上方四角设有
一种基于视觉的机器人位姿调整装置及方法.pdf
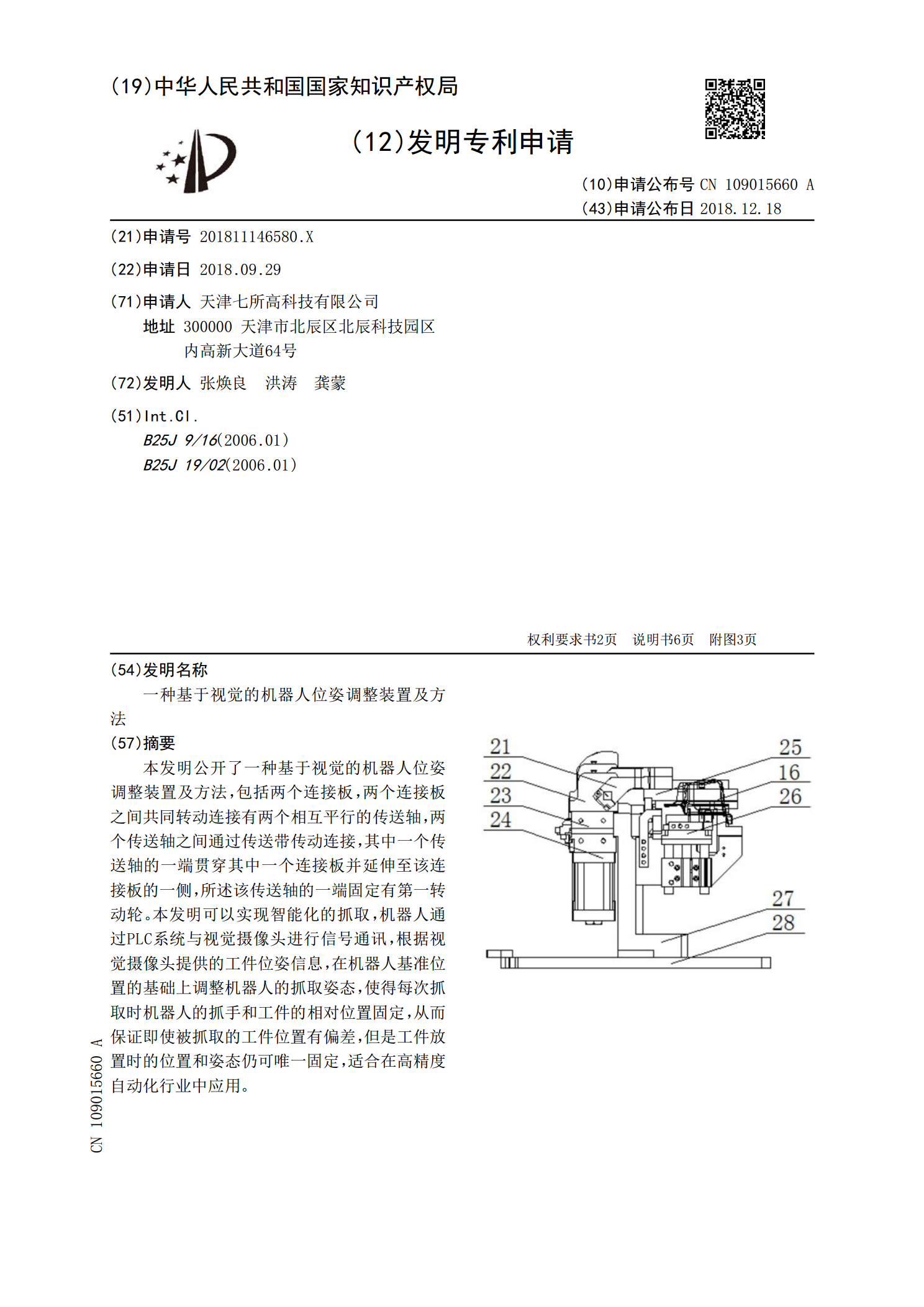
本发明公开了一种基于视觉的机器人位姿调整装置及方法,包括两个连接板,两个连接板之间共同转动连接有两个相互平行的传送轴,两个传送轴之间通过传送带传动连接,其中一个传送轴的一端贯穿其中一个连接板并延伸至该连接板的一侧,所述该传送轴的一端固定有第一转动轮。本发明可以实现智能化的抓取,机器人通过PLC系统与视觉摄像头进行信号通讯,根据视觉摄像头提供的工件位姿信息,在机器人基准位置的基础上调整机器人的抓取姿态,使得每次抓取时机器人的抓手和工件的相对位置固定,从而保证即使被抓取的工件位置有偏差,但是工件放置时的位置和
一种车辆位姿调整平台.pdf
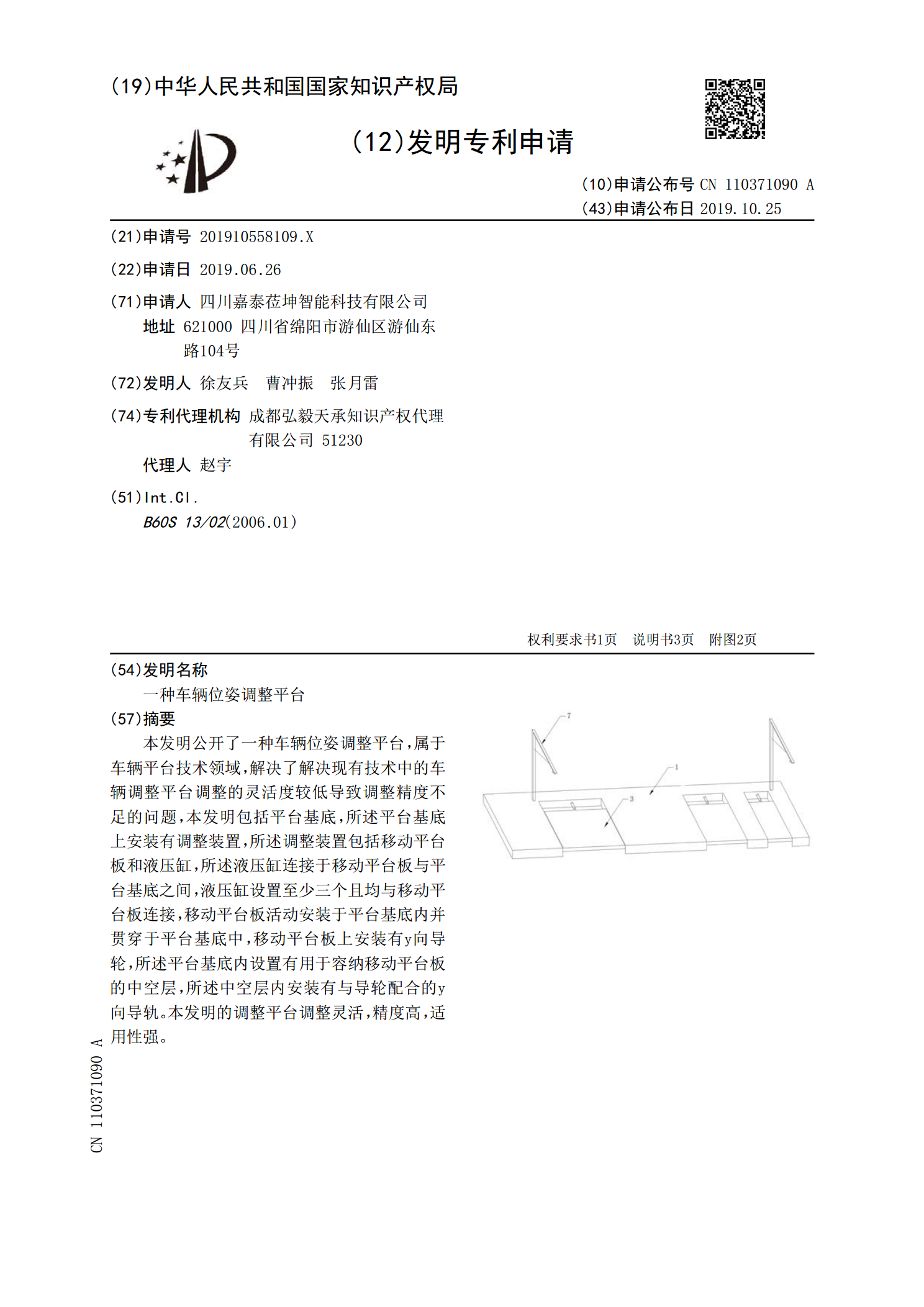
本发明公开了一种车辆位姿调整平台,属于车辆平台技术领域,解决了解决现有技术中的车辆调整平台调整的灵活度较低导致调整精度不足的问题,本发明包括平台基底,所述平台基底上安装有调整装置,所述调整装置包括移动平台板和液压缸,所述液压缸连接于移动平台板与平台基底之间,液压缸设置至少三个且均与移动平台板连接,移动平台板活动安装于平台基底内并贯穿于平台基底中,移动平台板上安装有y向导轮,所述平台基底内设置有用于容纳移动平台板的中空层,所述中空层内安装有与导轮配合的y向导轨。本发明的调整平台调整灵活,精度高,适用性强。
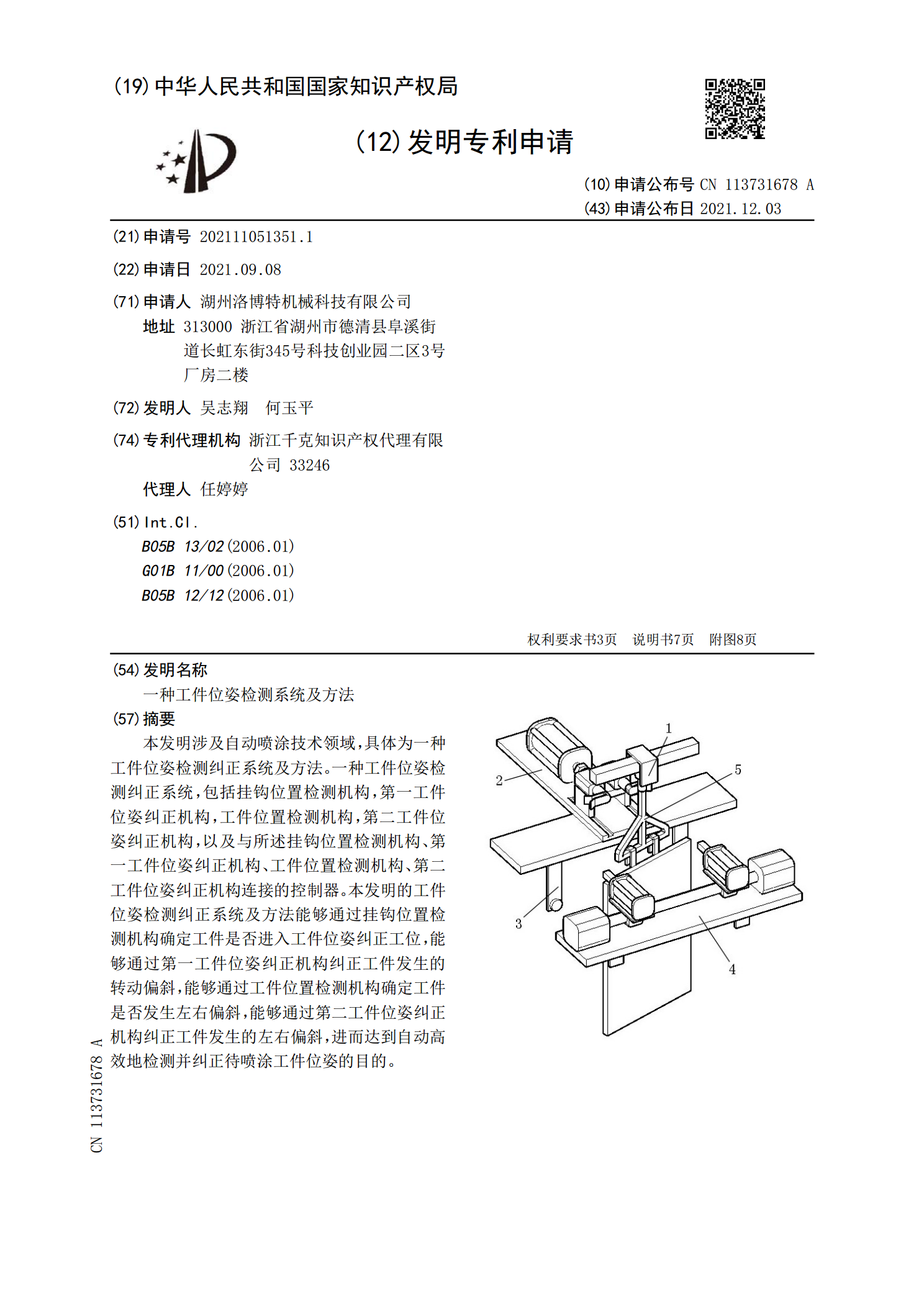
一种工件位姿检测系统及方法.pdf
本发明涉及自动喷涂技术领域,具体为一种工件位姿检测纠正系统及方法。一种工件位姿检测纠正系统,包括挂钩位置检测机构,第一工件位姿纠正机构,工件位置检测机构,第二工件位姿纠正机构,以及与所述挂钩位置检测机构、第一工件位姿纠正机构、工件位置检测机构、第二工件位姿纠正机构连接的控制器。本发明的工件位姿检测纠正系统及方法能够通过挂钩位置检测机构确定工件是否进入工件位姿纠正工位,能够通过第一工件位姿纠正机构纠正工件发生的转动偏斜,能够通过工件位置检测机构确定工件是否发生左右偏斜,能够通过第二工件位姿纠正机构纠正工件发