
轮式移动机器人底盘直线悬挂减震装置.pdf

康佳****文库

1/7

2/7

3/7

4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
轮式移动机器人底盘直线悬挂减震装置.pdf
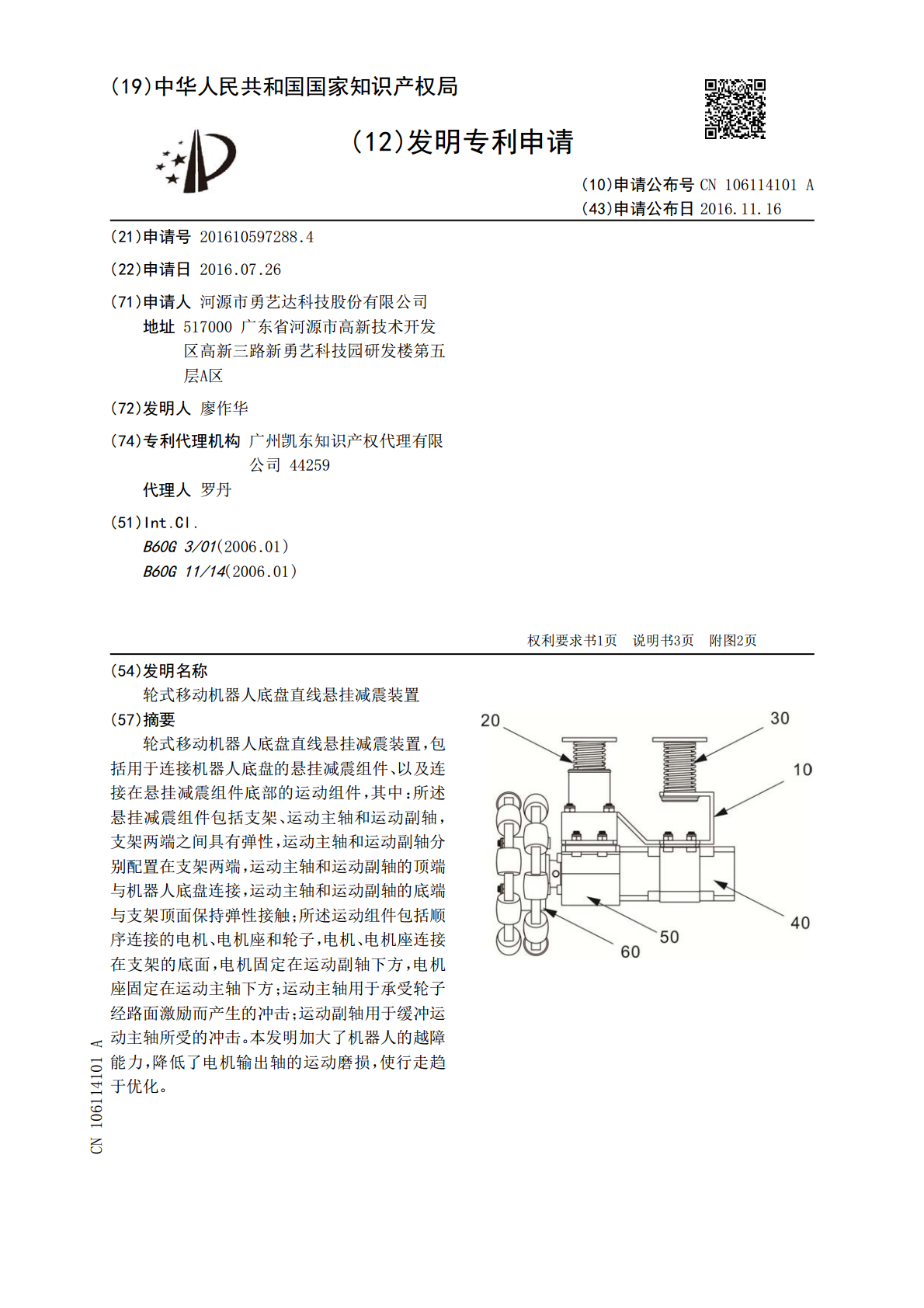
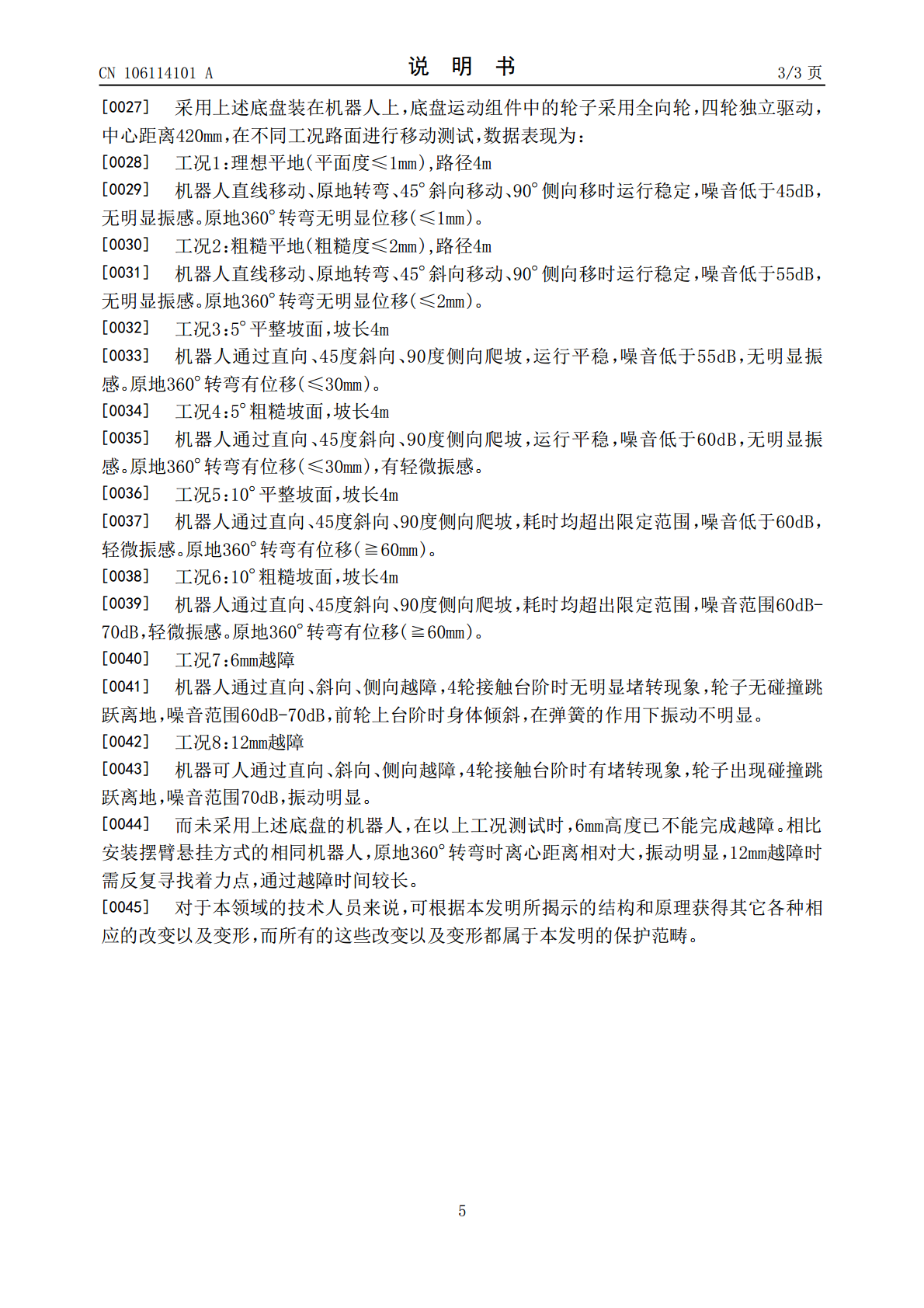
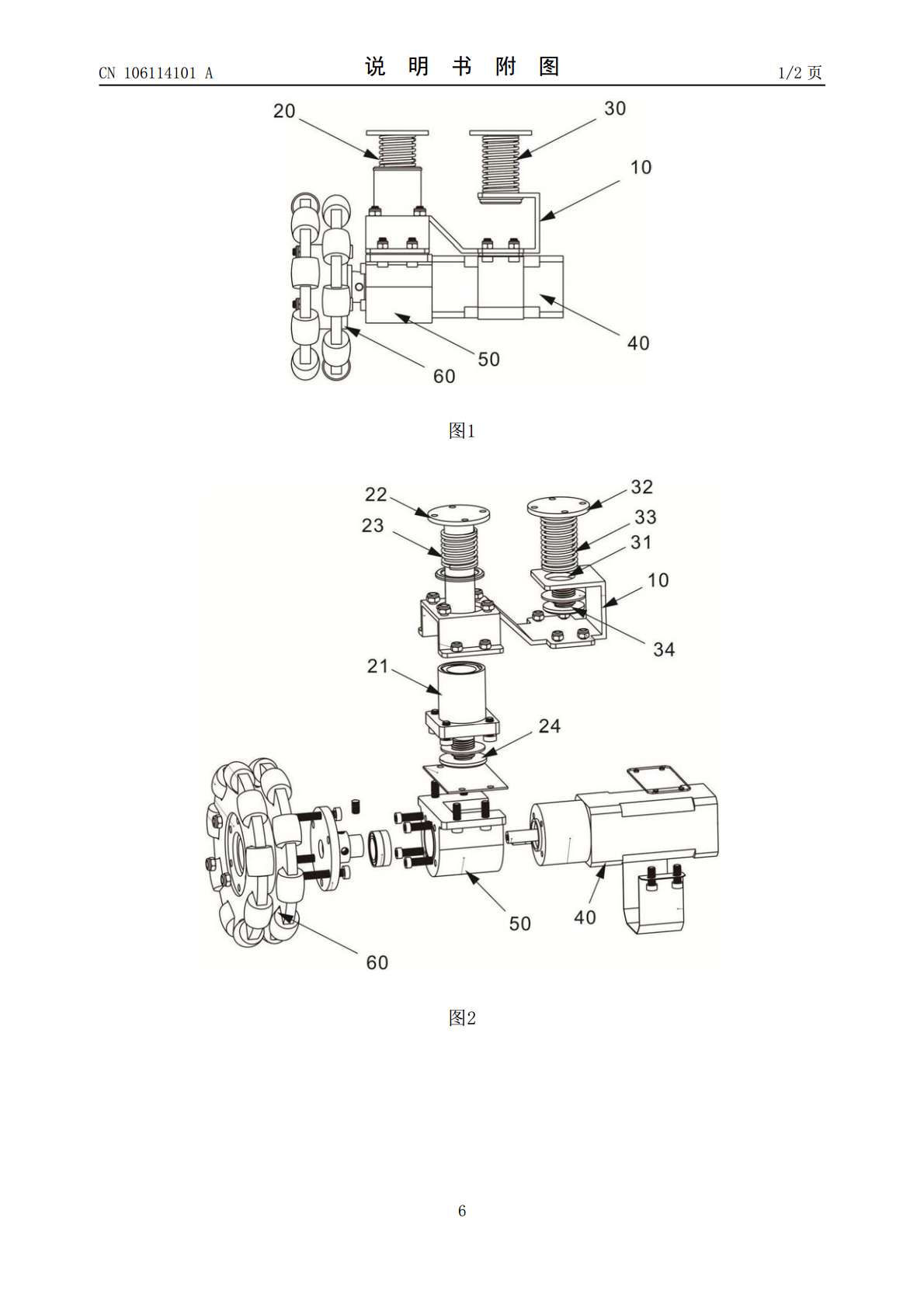
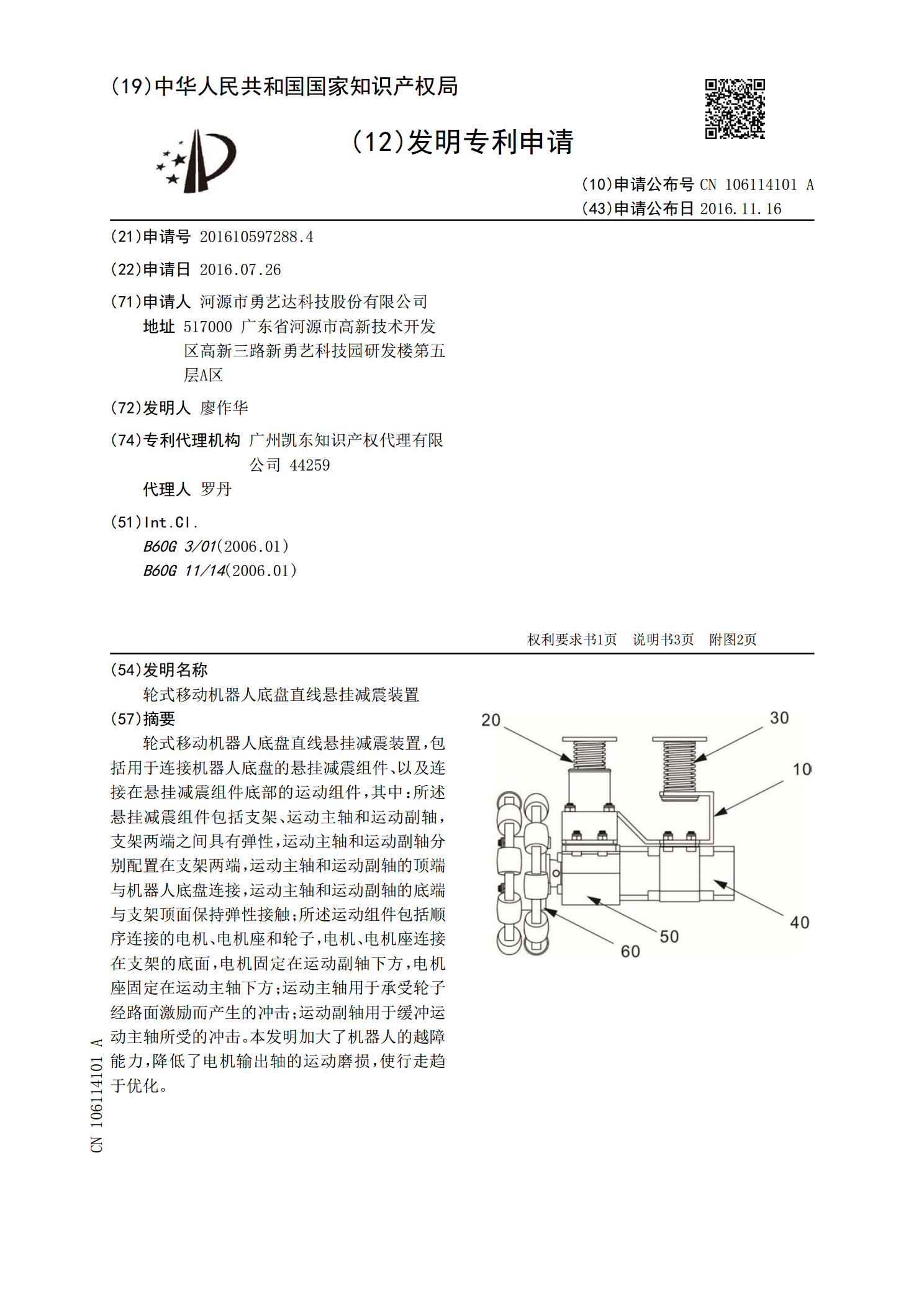
轮式移动机器人底盘直线悬挂减震装置,包括用于连接机器人底盘的悬挂减震组件、以及连接在悬挂减震组件底部的运动组件,其中:所述悬挂减震组件包括支架、运动主轴和运动副轴,支架两端之间具有弹性,运动主轴和运动副轴分别配置在支架两端,运动主轴和运动副轴的顶端与机器人底盘连接,运动主轴和运动副轴的底端与支架顶面保持弹性接触;所述运动组件包括顺序连接的电机、电机座和轮子,电机、电机座连接在支架的底面,电机固定在运动副轴下方,电机座固定在运动主轴下方;运动主轴用于承受轮子经路面激励而产生的冲击;运动副轴用于缓冲运动主轴所

轮式移动机器人悬挂装置.pdf
本发明公开了轮式移动机器人悬挂装置,底盘(1)上开有用于穿过两个车轮(11)的两个第一通孔,两所述第一通孔之间的所述底盘(1)中部固定设置有两支撑座(2),两所述支撑座(2)相对设置且其上水平设置有用于穿过旋转轴(6)的两第二通孔,两所述旋转轴(6)分别与车轮支架(7)的一端固定连接,两所述车轮支架(7)的另一端分别与两所述车轮(11)相连,两所述车轮支架(7)之间设置有间隙,两所述车轮支架(7)的相对端均设置有板簧(4)。本发明提供的轮式移动机器人悬挂装置,缓解车轮振动引起的机器人颠簸,提高机器人行驶的

一种轮式移动机器人悬挂装置.pdf
本发明公开了一种轮式移动机器人悬挂装置,其特征在于,包括:底盘(1),所述底盘(1)中部开有用于穿过车轮(15)的第一通孔,所述第一通孔前端的所述底盘(1)上固定设置有弹簧导杆固定座(2),所述第一通孔后端的所述底盘(1)上固定设置有支撑座(6)。本发明提供的一种轮式移动机器人悬挂装置,能够保证驱动轮始终着地,提高机器人底盘的地面适应能力,防止驱动轮被从动轮架空,出现驱动轮空转或打滑的现象,影响机器人运动,同时可以有效缓解机器人的车轮在路面上运动时传递给机器人底盘的振动,并且结构简单,控制方便。

轮式车辆悬挂装置.pdf
本发明提供一种轮式车辆悬挂装置,包括车辆底盘、设置在所述车辆底盘上的动力传输机构、所述动力传输机构连接的摇摆机构以及所述摇摆机构连接的动力输出机构,在所述车辆底盘与所述摇摆机构之间设置有减震机构,其中所述摇摆机构至少包括车轮支架,所述减震机构至少包括连接所述车轮支架与所述车辆底盘的弹性减震器。本发明所述的轮式车辆悬挂装置,能够有效减缓小型轮式车辆的车轮在路面上运动时传递给车辆底盘的震动,提高车辆运行的稳定性。
轮式机器人弹性减震底盘结构.pdf
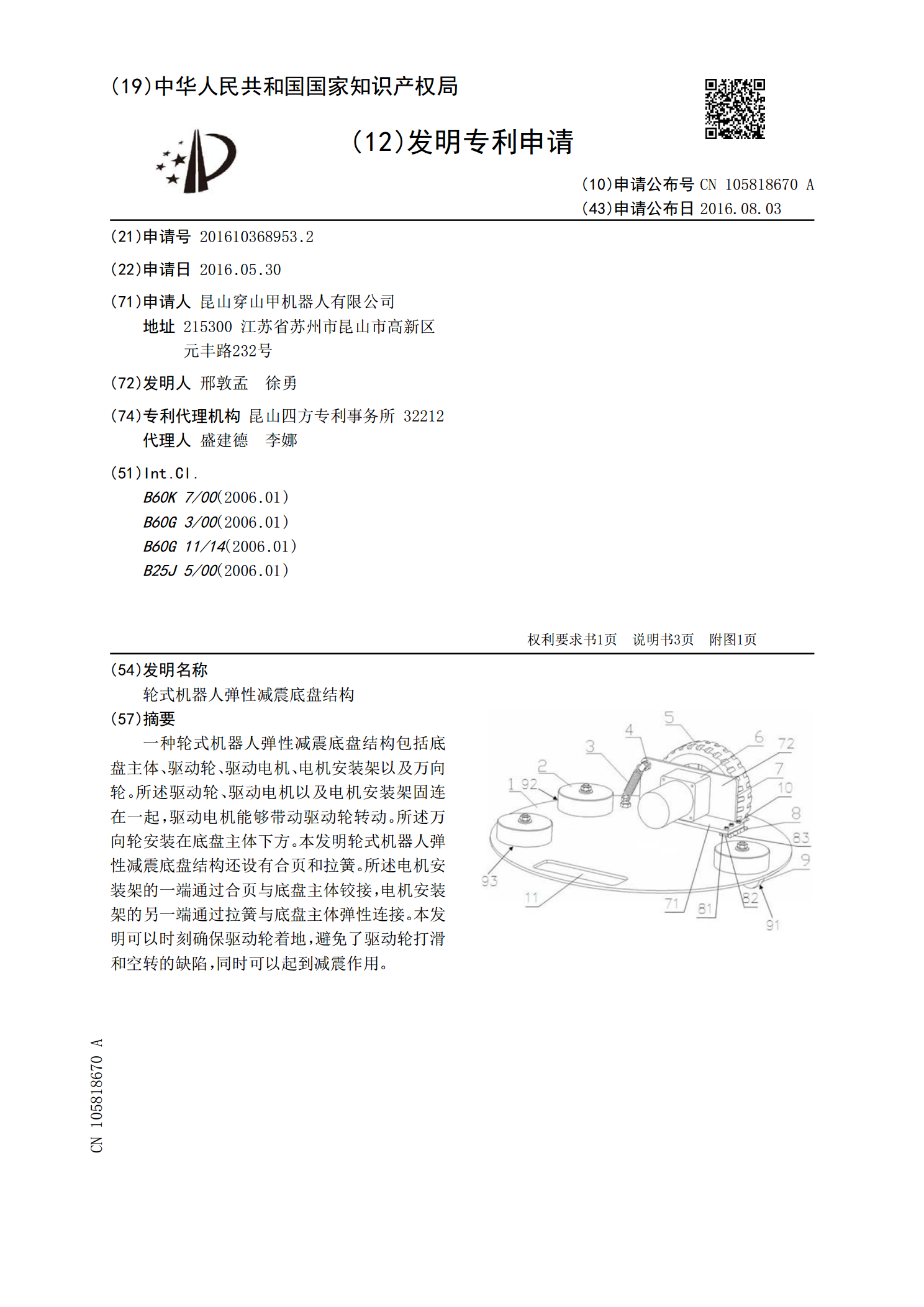
一种轮式机器人弹性减震底盘结构包括底盘主体、驱动轮、驱动电机、电机安装架以及万向轮。所述驱动轮、驱动电机以及电机安装架固连在一起,驱动电机能够带动驱动轮转动。所述万向轮安装在底盘主体下方。本发明轮式机器人弹性减震底盘结构还设有合页和拉簧。所述电机安装架的一端通过合页与底盘主体铰接,电机安装架的另一端通过拉簧与底盘主体弹性连接。本发明可以时刻确保驱动轮着地,避免了驱动轮打滑和空转的缺陷,同时可以起到减震作用。