
一种无机械差速结构的灵活转向双驱动菱形无人车.pdf

是丹****ni

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无机械差速结构的灵活转向双驱动菱形无人车.pdf
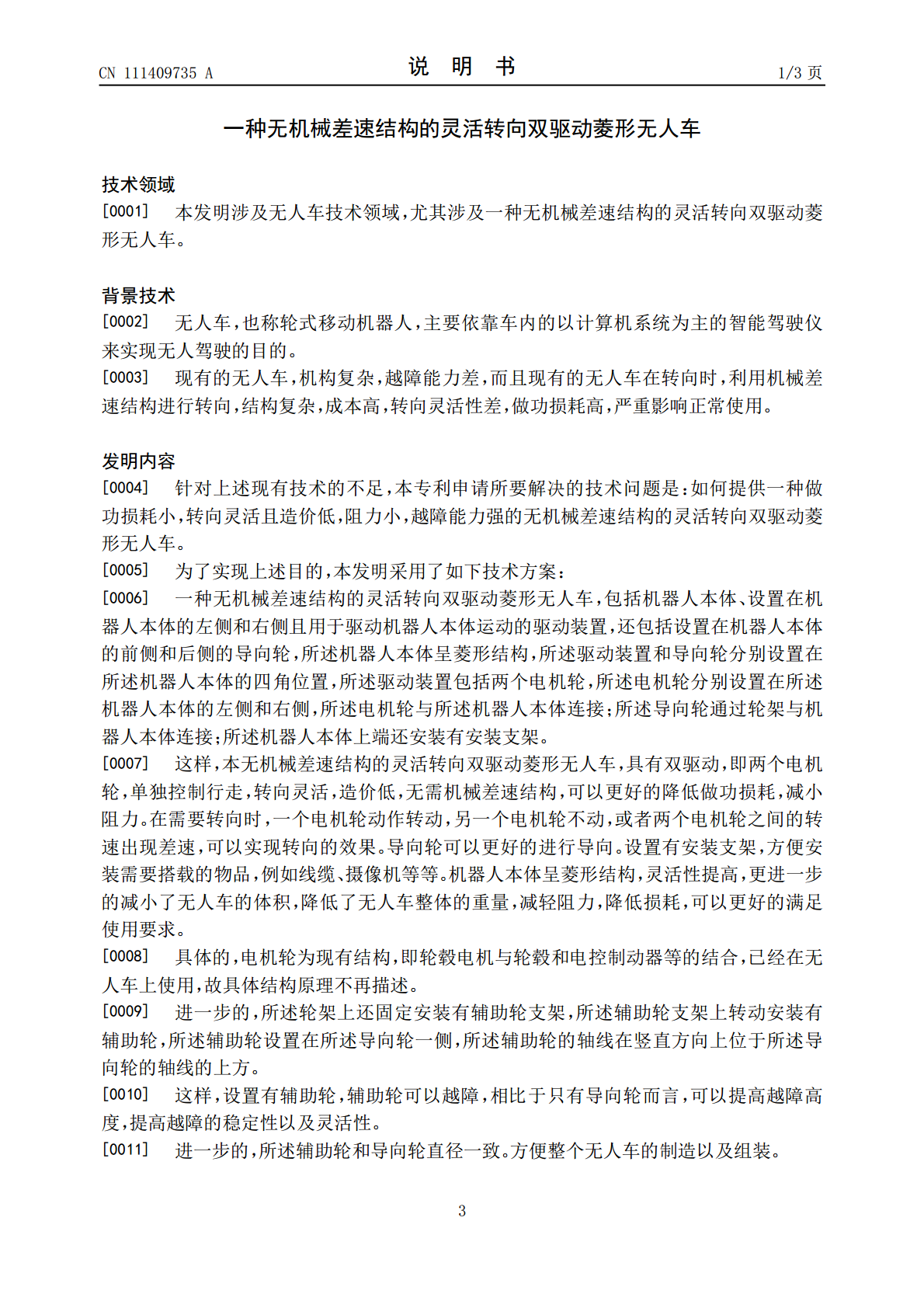
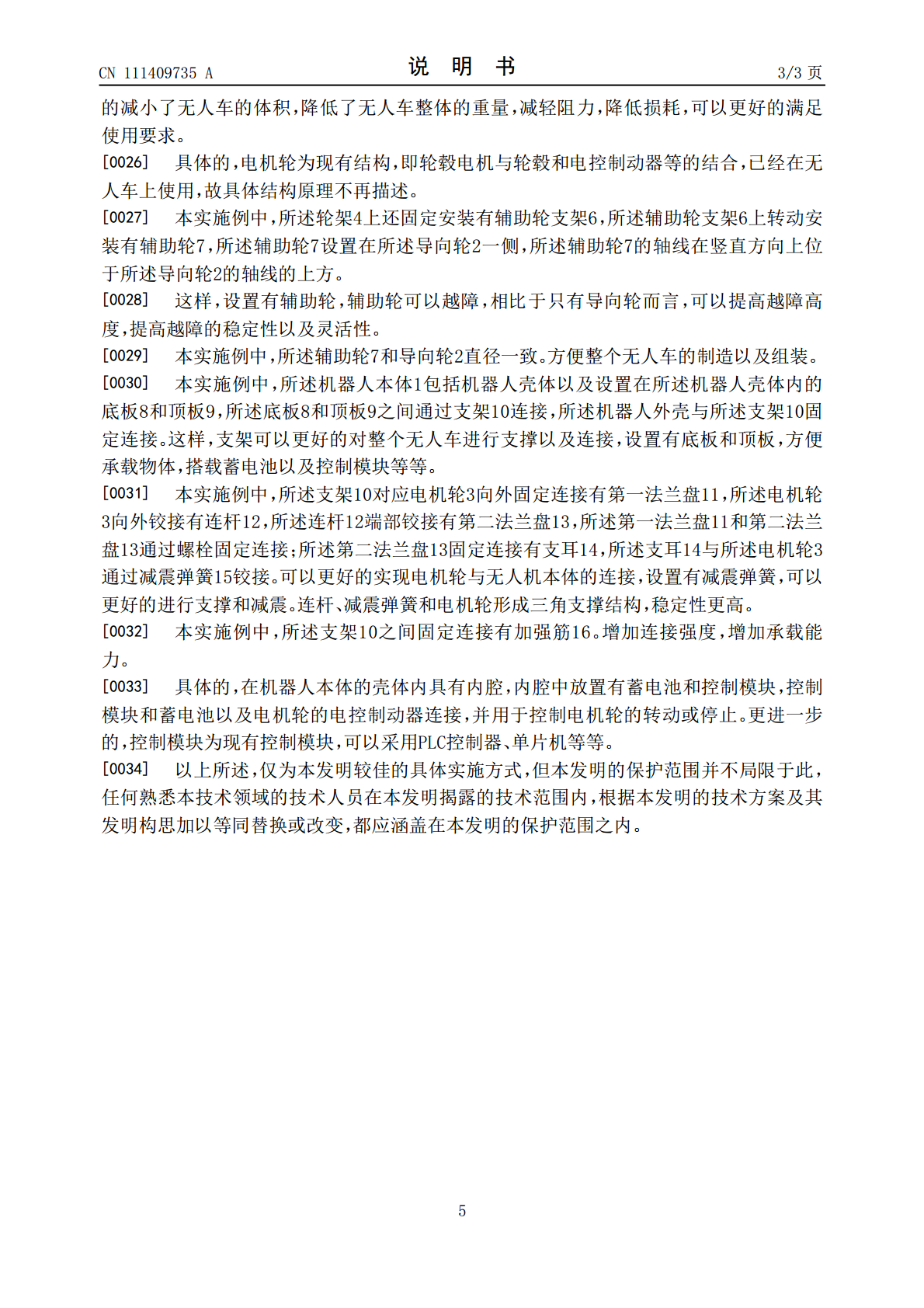
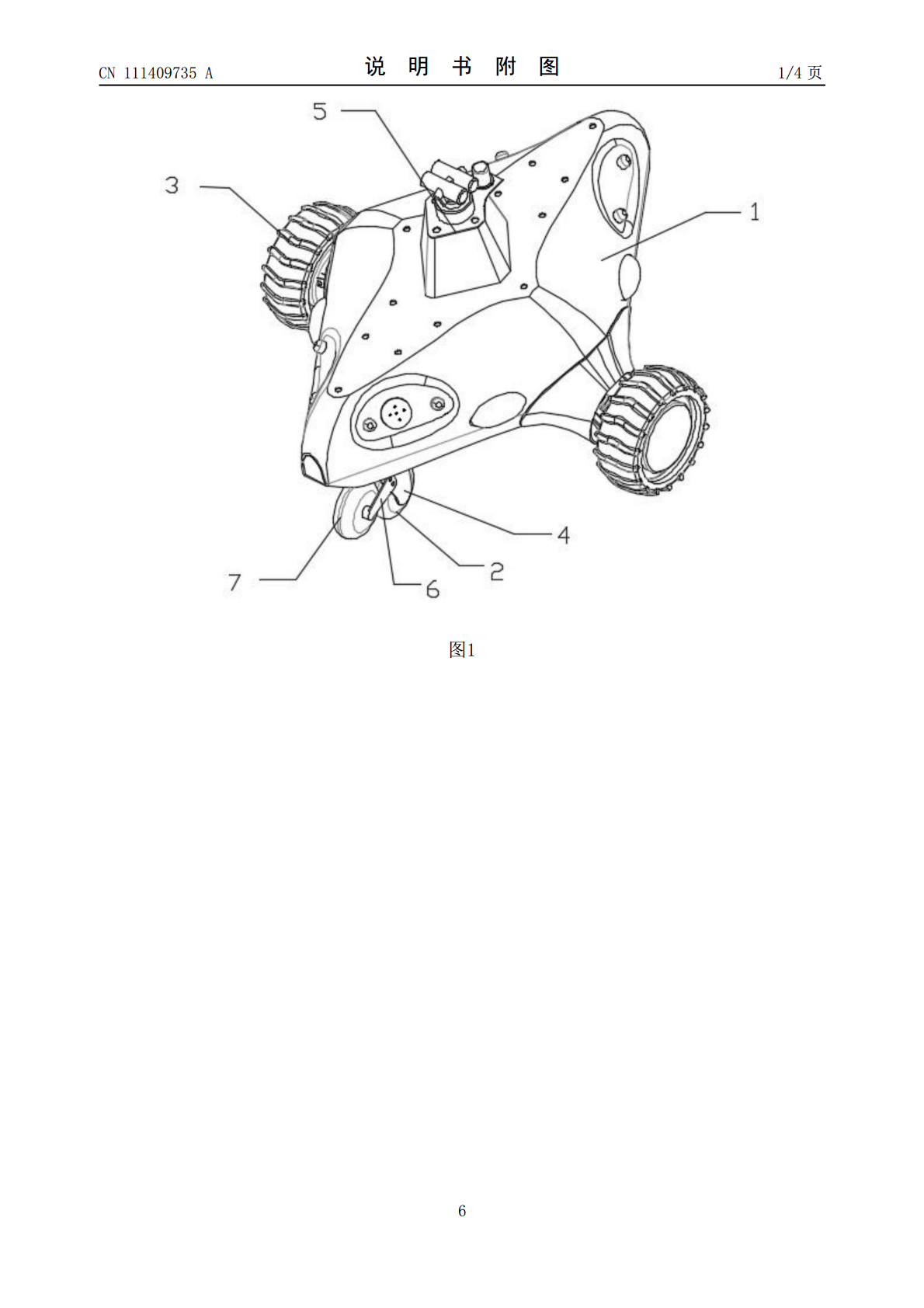
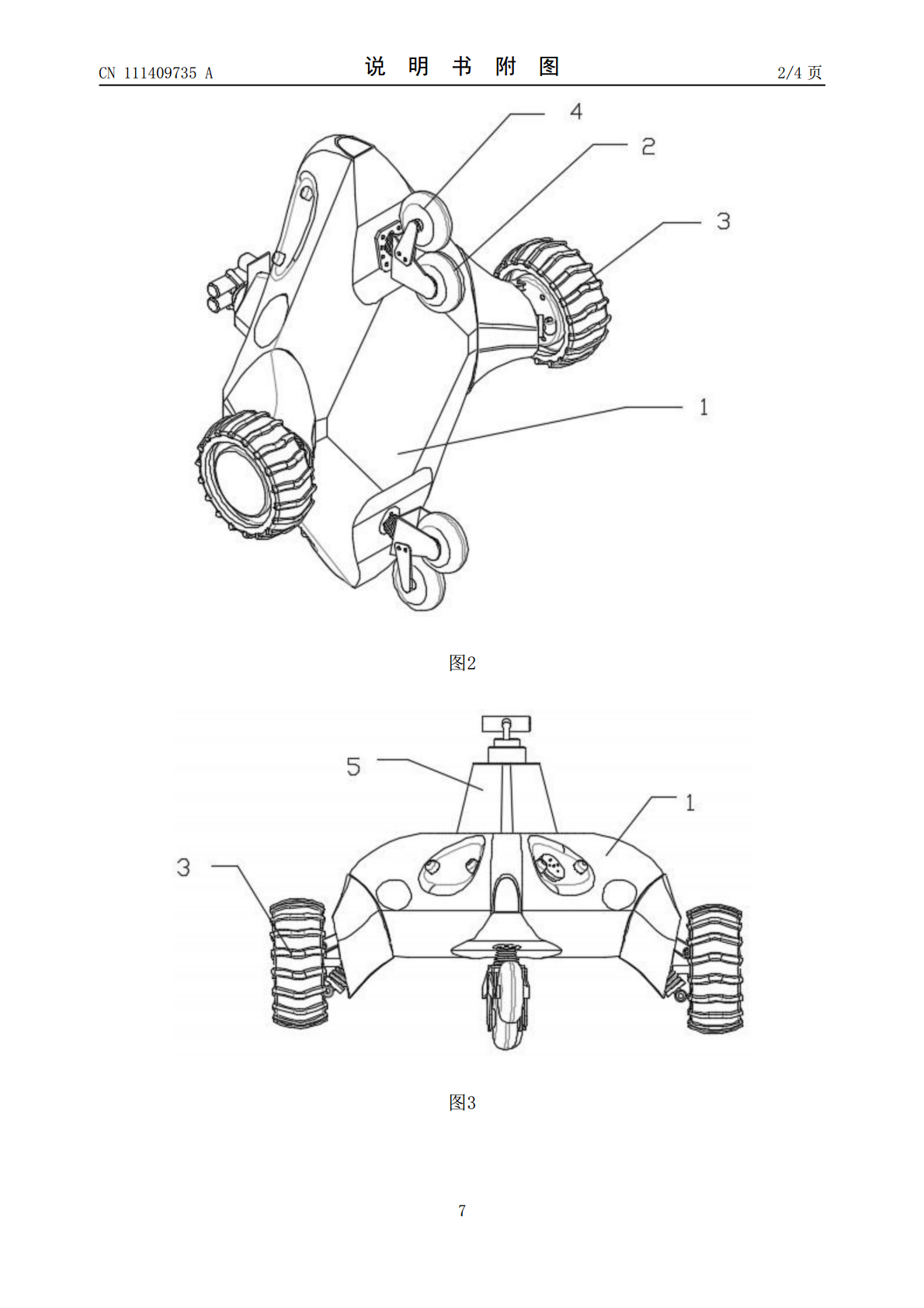
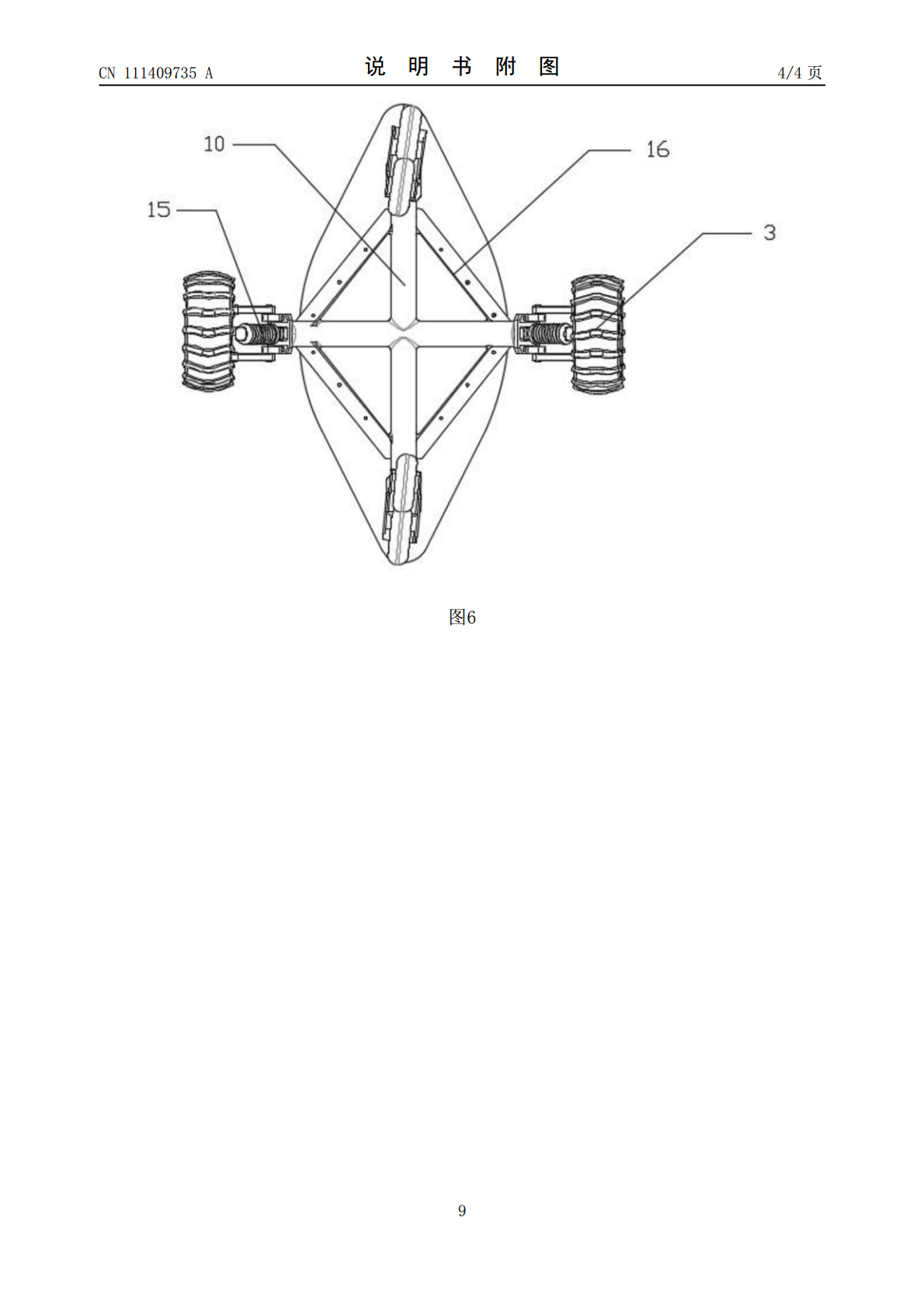
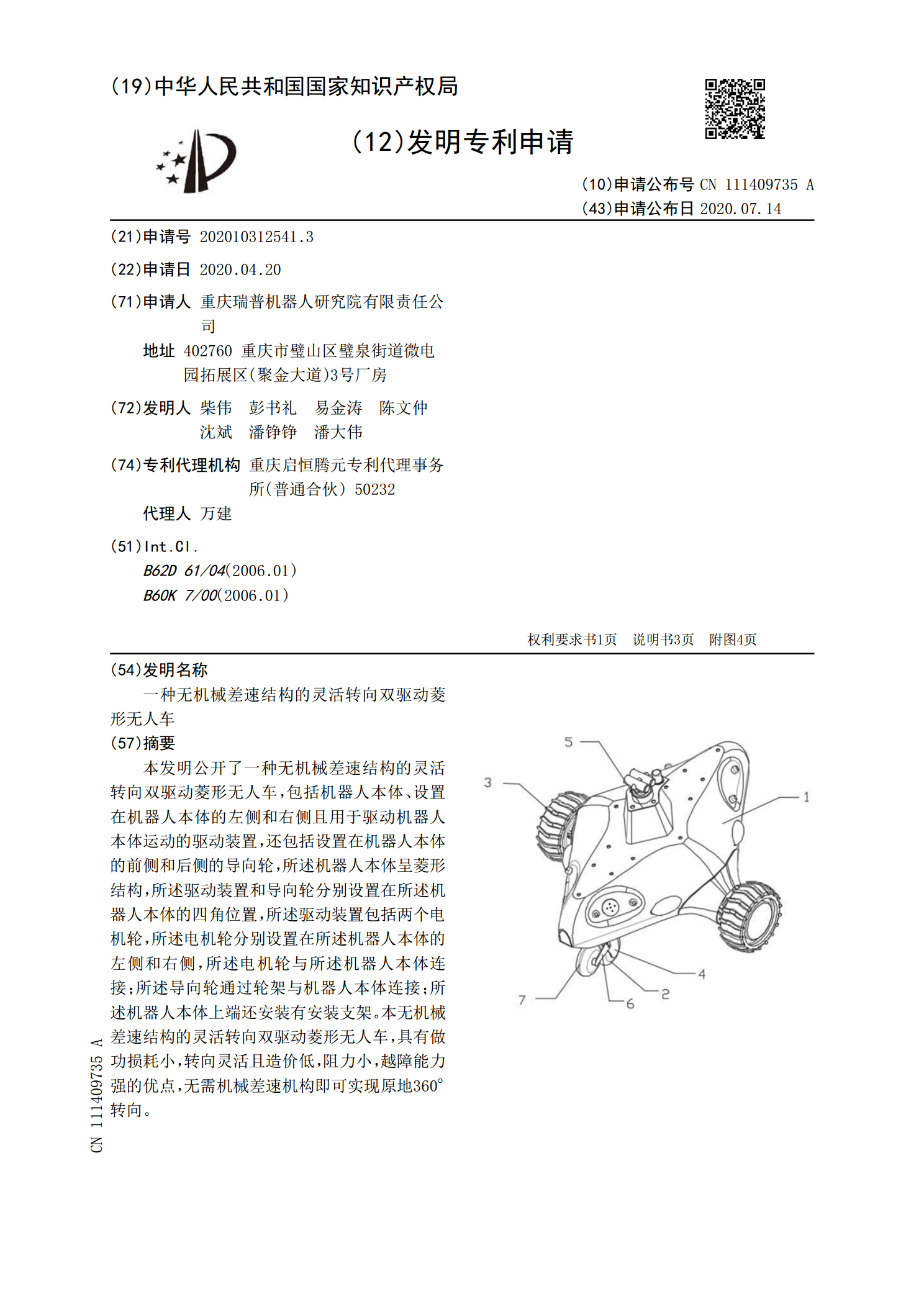
本发明公开了一种无机械差速结构的灵活转向双驱动菱形无人车,包括机器人本体、设置在机器人本体的左侧和右侧且用于驱动机器人本体运动的驱动装置,还包括设置在机器人本体的前侧和后侧的导向轮,所述机器人本体呈菱形结构,所述驱动装置和导向轮分别设置在所述机器人本体的四角位置,所述驱动装置包括两个电机轮,所述电机轮分别设置在所述机器人本体的左侧和右侧,所述电机轮与所述机器人本体连接;所述导向轮通过轮架与机器人本体连接;所述机器人本体上端还安装有安装支架。本无机械差速结构的灵活转向双驱动菱形无人车,具有做功损耗小,转向灵
差速结构的转向驱动桥.pdf
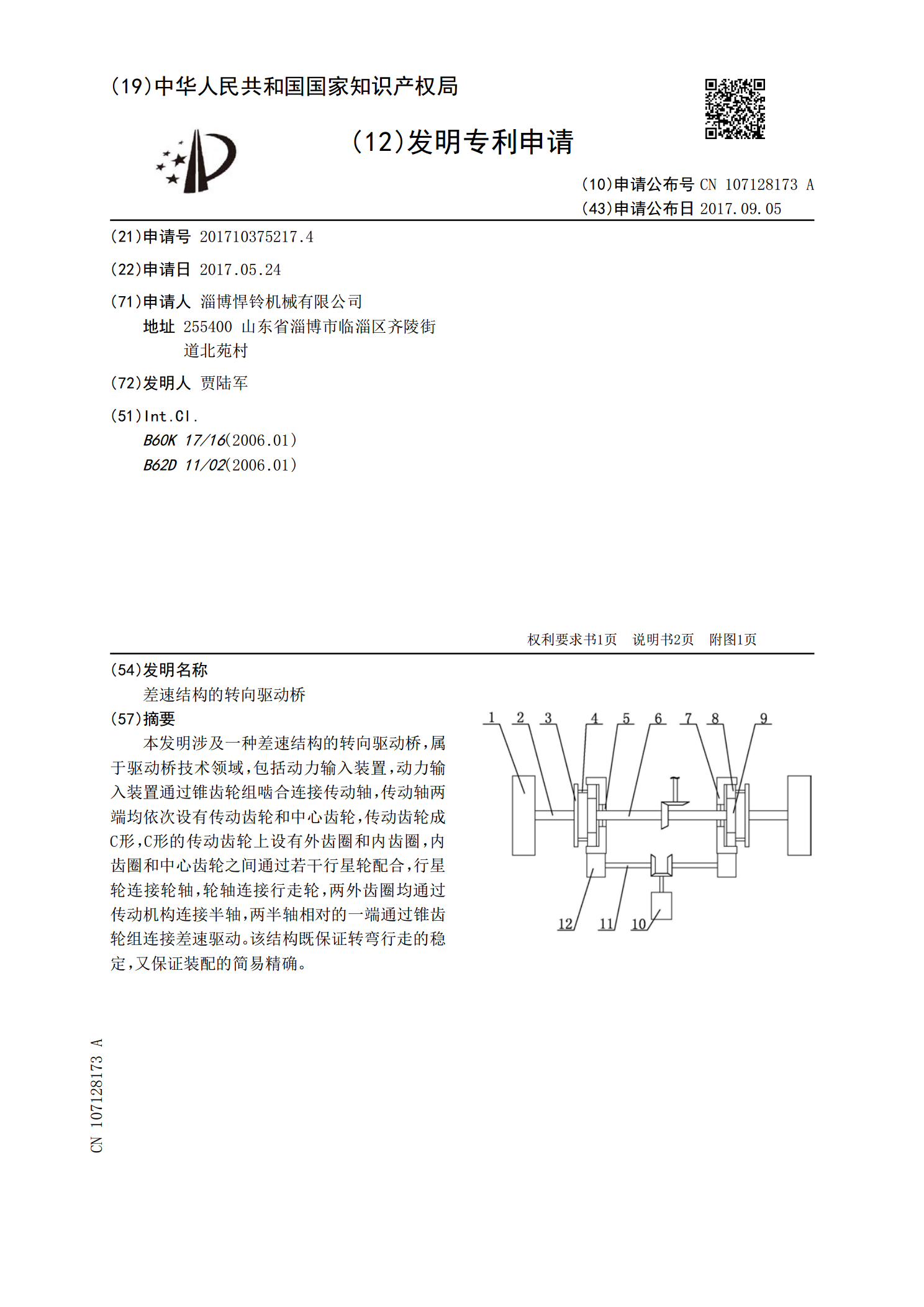
本发明涉及一种差速结构的转向驱动桥,属于驱动桥技术领域,包括动力输入装置,动力输入装置通过锥齿轮组啮合连接传动轴,传动轴两端均依次设有传动齿轮和中心齿轮,传动齿轮成C形,C形的传动齿轮上设有外齿圈和内齿圈,内齿圈和中心齿轮之间通过若干行星轮配合,行星轮连接轮轴,轮轴连接行走轮,两外齿圈均通过传动机构连接半轴,两半轴相对的一端通过锥齿轮组连接差速驱动。该结构既保证转弯行走的稳定,又保证装配的简易精确。
一种双轮驱动无碳小车可差速转向机构.pdf
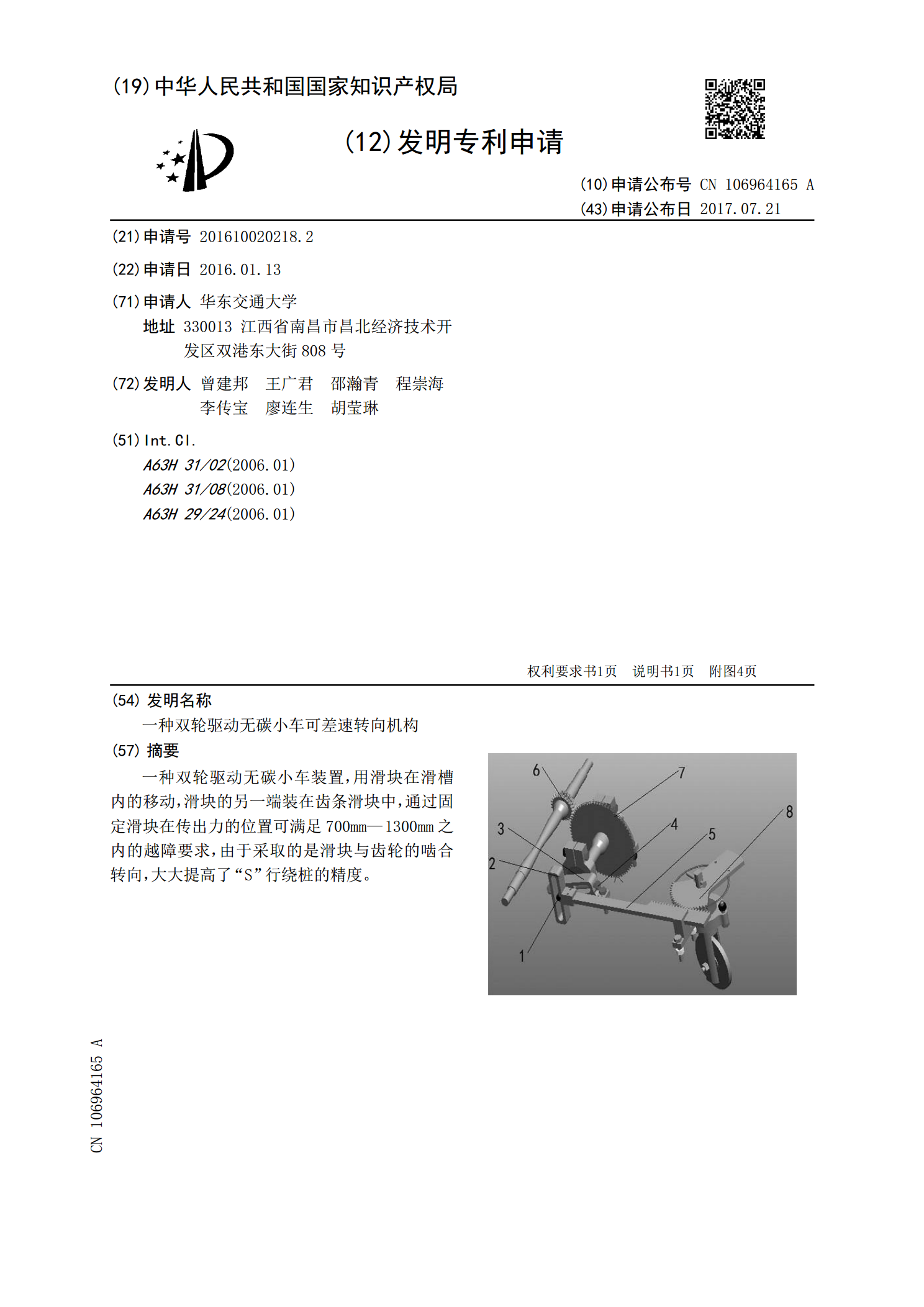
一种双轮驱动无碳小车装置,用滑块在滑槽内的移动,滑块的另一端装在齿条滑块中,通过固定滑块在传出力的位置可满足700mm—1300mm之内的越障要求,由于采取的是滑块与齿轮的啮合转向,大大提高了“S”行绕桩的精度。
非差速转向车.pdf
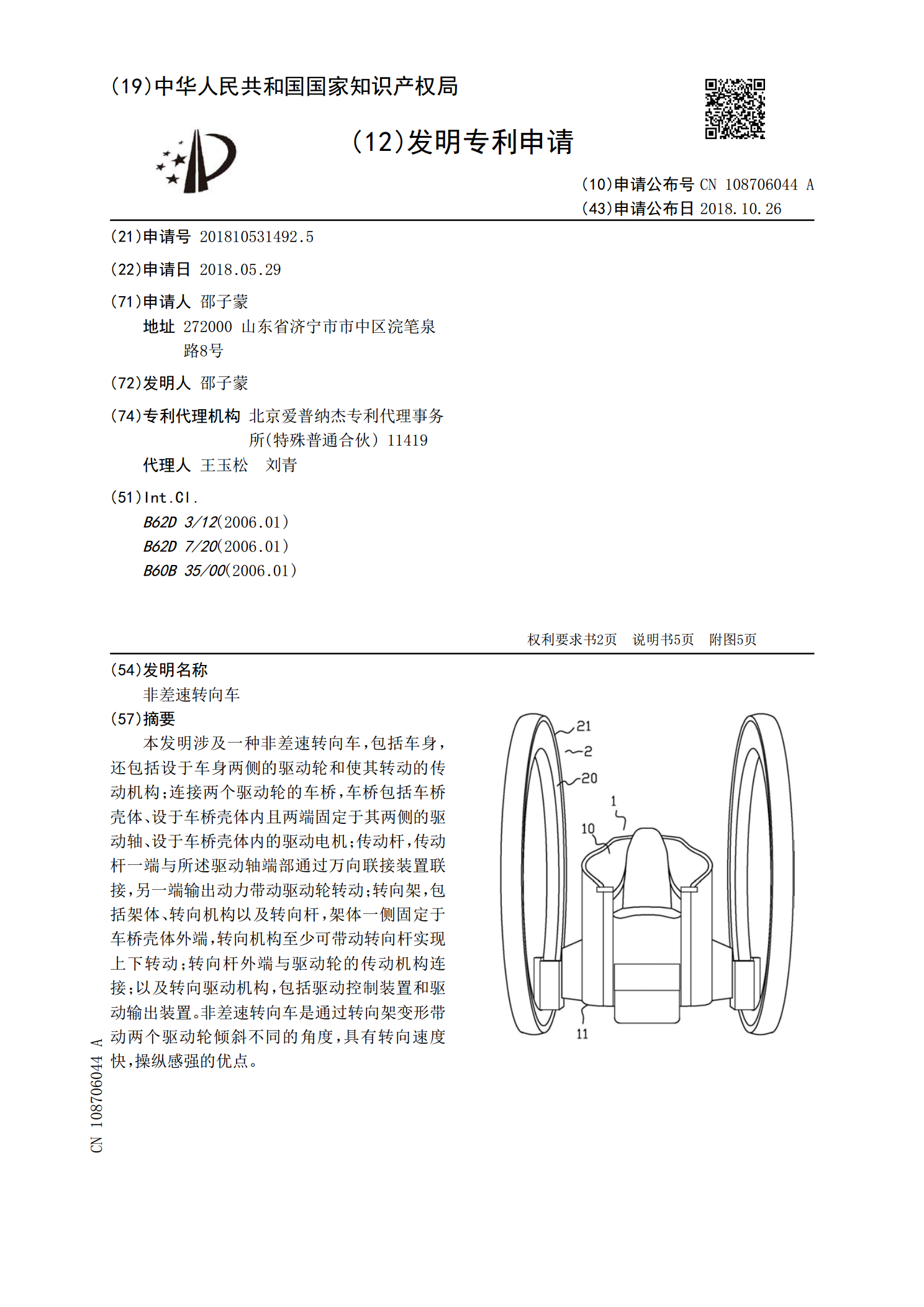
本发明涉及一种非差速转向车,包括车身,还包括设于车身两侧的驱动轮和使其转动的传动机构;连接两个驱动轮的车桥,车桥包括车桥壳体、设于车桥壳体内且两端固定于其两侧的驱动轴、设于车桥壳体内的驱动电机;传动杆,传动杆一端与所述驱动轴端部通过万向联接装置联接,另一端输出动力带动驱动轮转动;转向架,包括架体、转向机构以及转向杆,架体一侧固定于车桥壳体外端,转向机构至少可带动转向杆实现上下转动;转向杆外端与驱动轮的传动机构连接;以及转向驱动机构,包括驱动控制装置和驱动输出装置。非差速转向车是通过转向架变形带动两个驱动轮

四轮电动车差速转向驱动机构.pdf
本发明公开了一种四轮电动车差速转向驱动机构,包括前轮驱动桥、后轮驱动桥和电控装置;所述前轮驱动桥包括前轮轴和通过羊角转向节安装在前轮轴两侧的两个电机,每个电机分别连接并驱动一前轮;而所述后轮驱动桥包括后轮轴和安装在后轮轴上的两个电机,而每个电机分别连接并驱动一后轮,所述电控装置与上述四个电机相连。本发明通过电控装置控制前轮轴上的两个电机驱动两个前轮差速运转来实现转向,同现有的机械转向机构相比,其转向过程无需传递机械力矩,更加省力,也更加灵活方便,且相比现有技术,本发明由于取消了前桥转向机构和后