
一种智能化攀爬式喷漆机器人.pdf

文宣****66

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能化攀爬式喷漆机器人.pdf
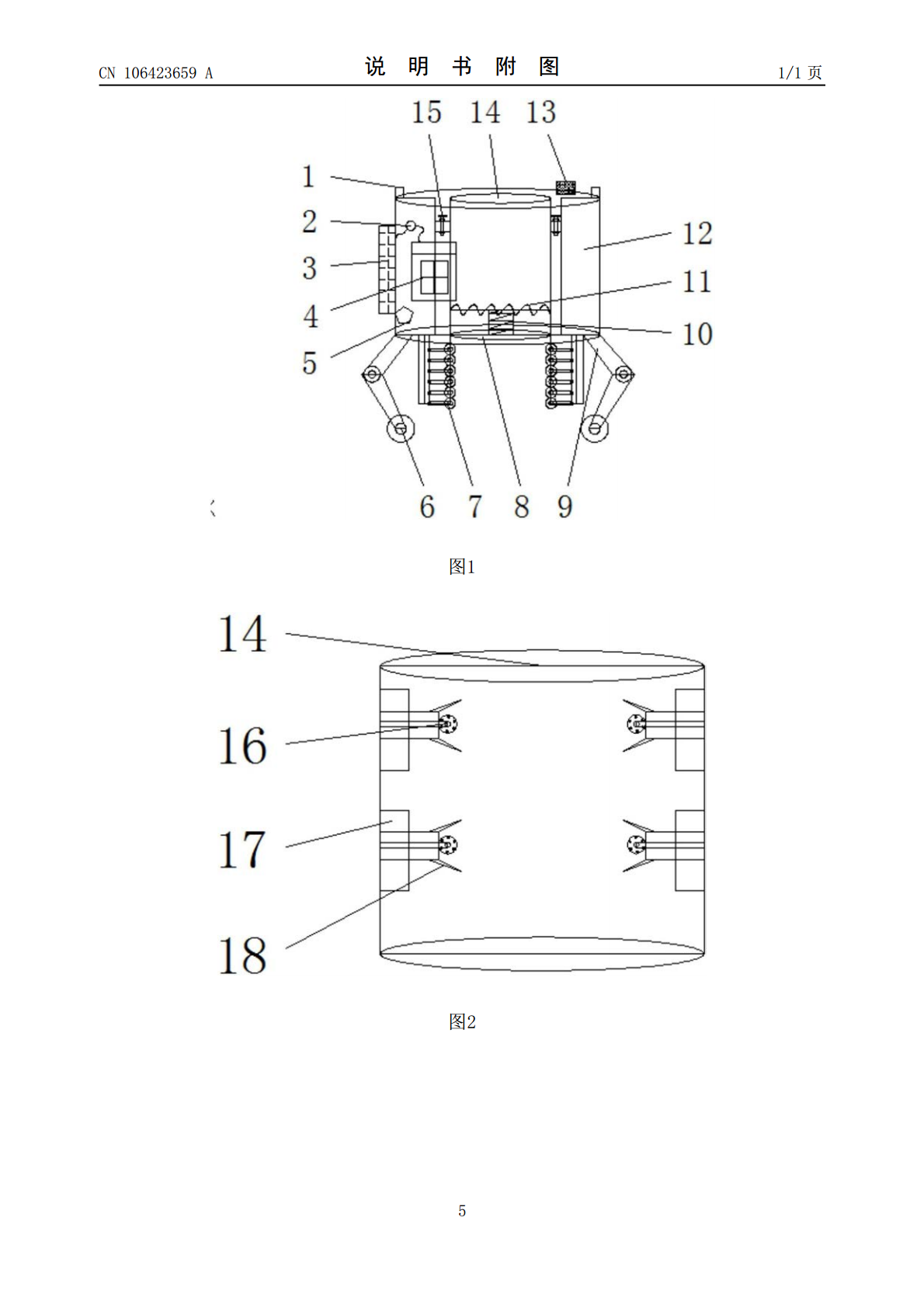
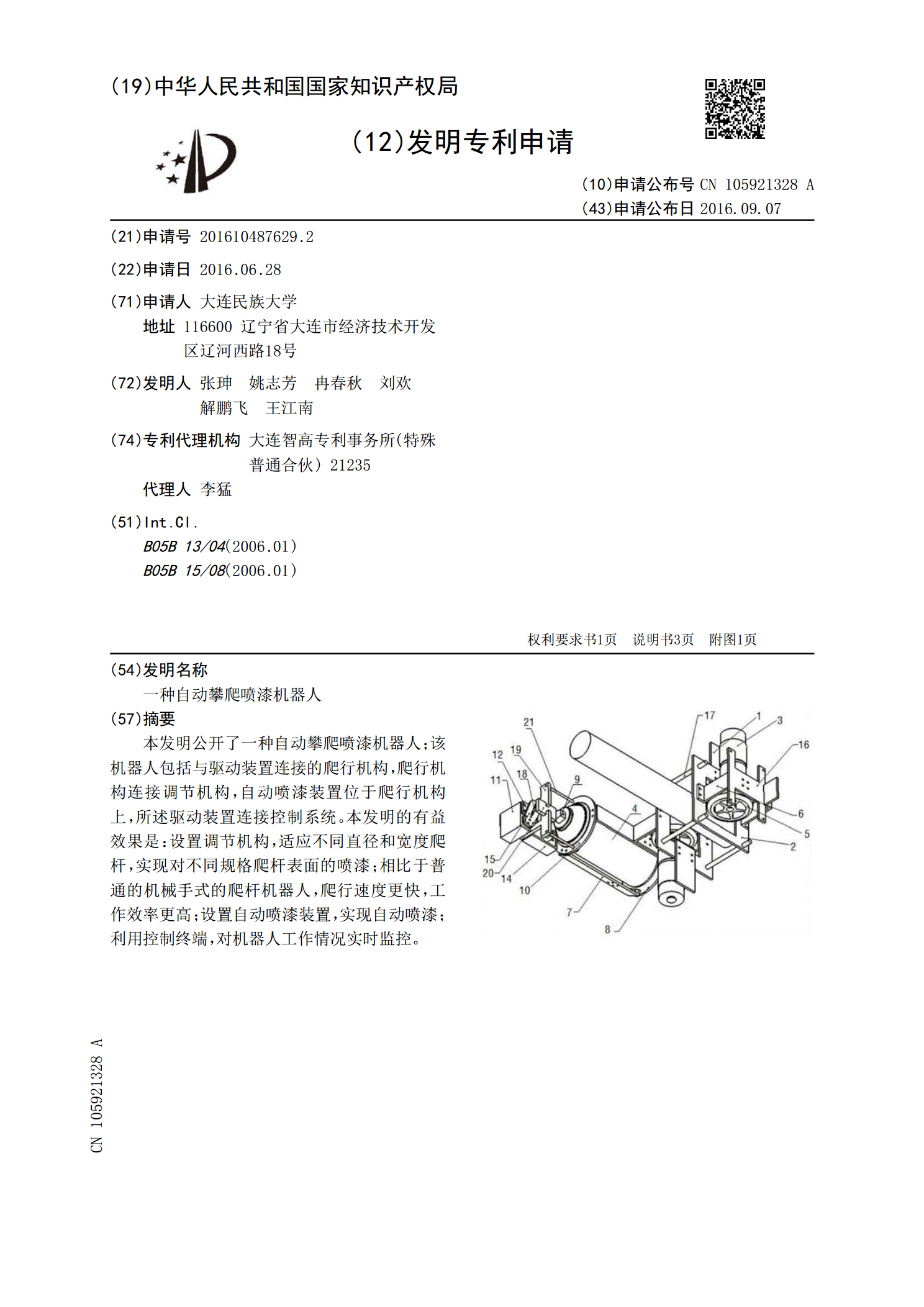
本发明公开一种智能化攀爬式喷漆机器人,包括发动机、控制器、数据处理器和工作主体,所述工作主体内部上端安装有环形喷管,所述环形喷管左下方安装有加压装置,所述加压装置一侧安装有挡板,所述工作主体一侧安装有电控阀,所述电控阀左上方设有漆料入口,所述漆料入口下方安装有PLC电控单元,所述PLC电控单元一端安装有发动机,所述发动机通过PLC电控单元与控制器相连,所述控制器左下方安装有数据处理器,所述数据处理器下方安装有行动轮,所述行动轮一侧安装有爬行轮器,所述爬行轮器内部上端安装有爬行轮,所述爬行轮右下方安装有连接
一种自动攀爬喷漆机器人.pdf
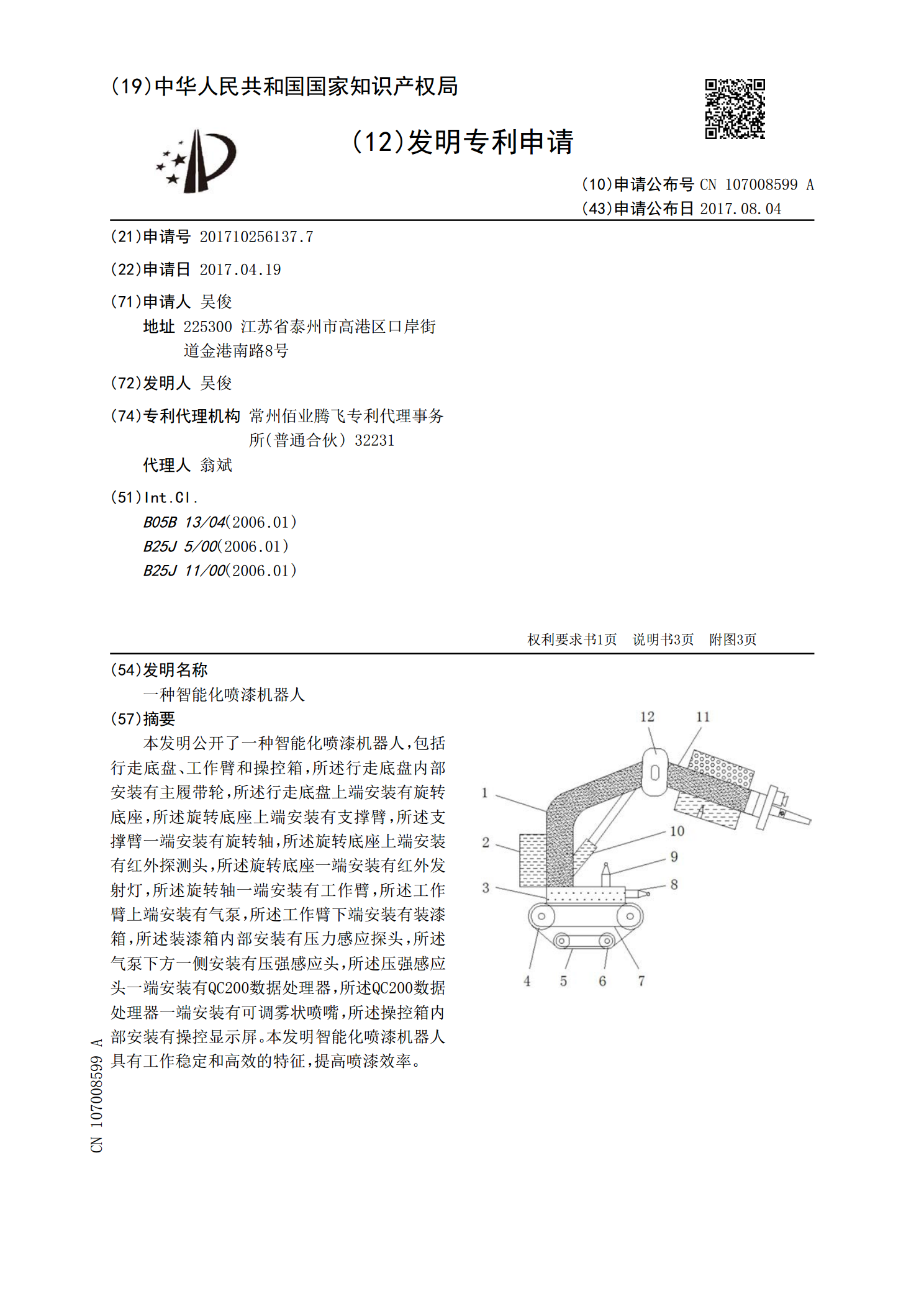
本发明公开了一种自动攀爬喷漆机器人;该机器人包括与驱动装置连接的爬行机构,爬行机构连接调节机构,自动喷漆装置位于爬行机构上,所述驱动装置连接控制系统。本发明的有益效果是:设置调节机构,适应不同直径和宽度爬杆,实现对不同规格爬杆表面的喷漆;相比于普通的机械手式的爬杆机器人,爬行速度更快,工作效率更高;设置自动喷漆装置,实现自动喷漆;利用控制终端,对机器人工作情况实时监控。
一种智能化喷漆机器人.pdf
本发明公开了一种智能化喷漆机器人,包括行走底盘、工作臂和操控箱,所述行走底盘内部安装有主履带轮,所述行走底盘上端安装有旋转底座,所述旋转底座上端安装有支撑臂,所述支撑臂一端安装有旋转轴,所述旋转底座上端安装有红外探测头,所述旋转底座一端安装有红外发射灯,所述旋转轴一端安装有工作臂,所述工作臂上端安装有气泵,所述工作臂下端安装有装漆箱,所述装漆箱内部安装有压力感应探头,所述气泵下方一侧安装有压强感应头,所述压强感应头一端安装有QC200数据处理器,所述QC200数据处理器一端安装有可调雾状喷嘴,所述操控箱内
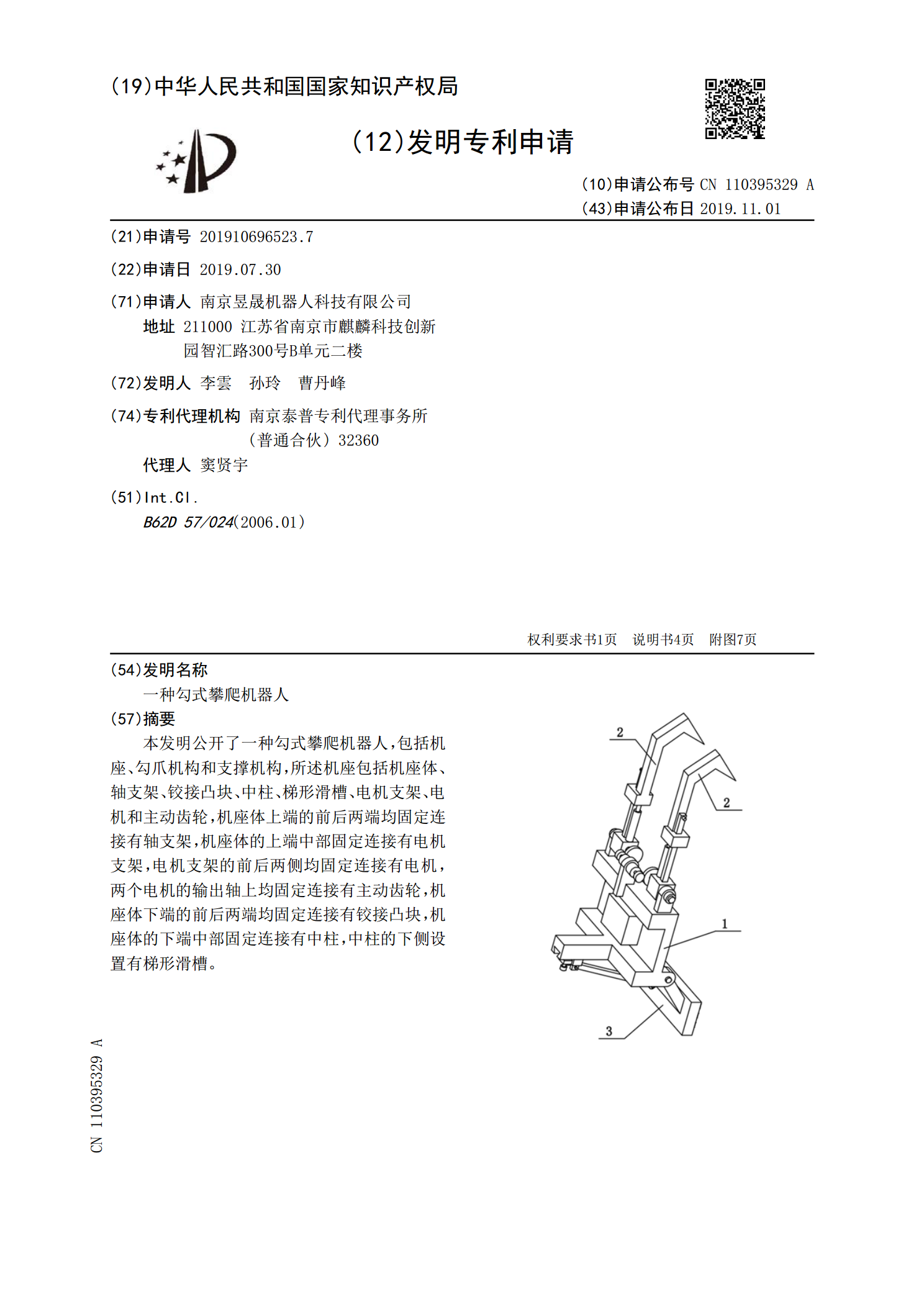
一种勾式攀爬机器人.pdf
本发明公开了一种勾式攀爬机器人,包括机座、勾爪机构和支撑机构,所述机座包括机座体、轴支架、铰接凸块、中柱、梯形滑槽、电机支架、电机和主动齿轮,机座体上端的前后两端均固定连接有轴支架,机座体的上端中部固定连接有电机支架,电机支架的前后两侧均固定连接有电机,两个电机的输出轴上均固定连接有主动齿轮,机座体下端的前后两端均固定连接有铰接凸块,机座体的下端中部固定连接有中柱,中柱的下侧设置有梯形滑槽。
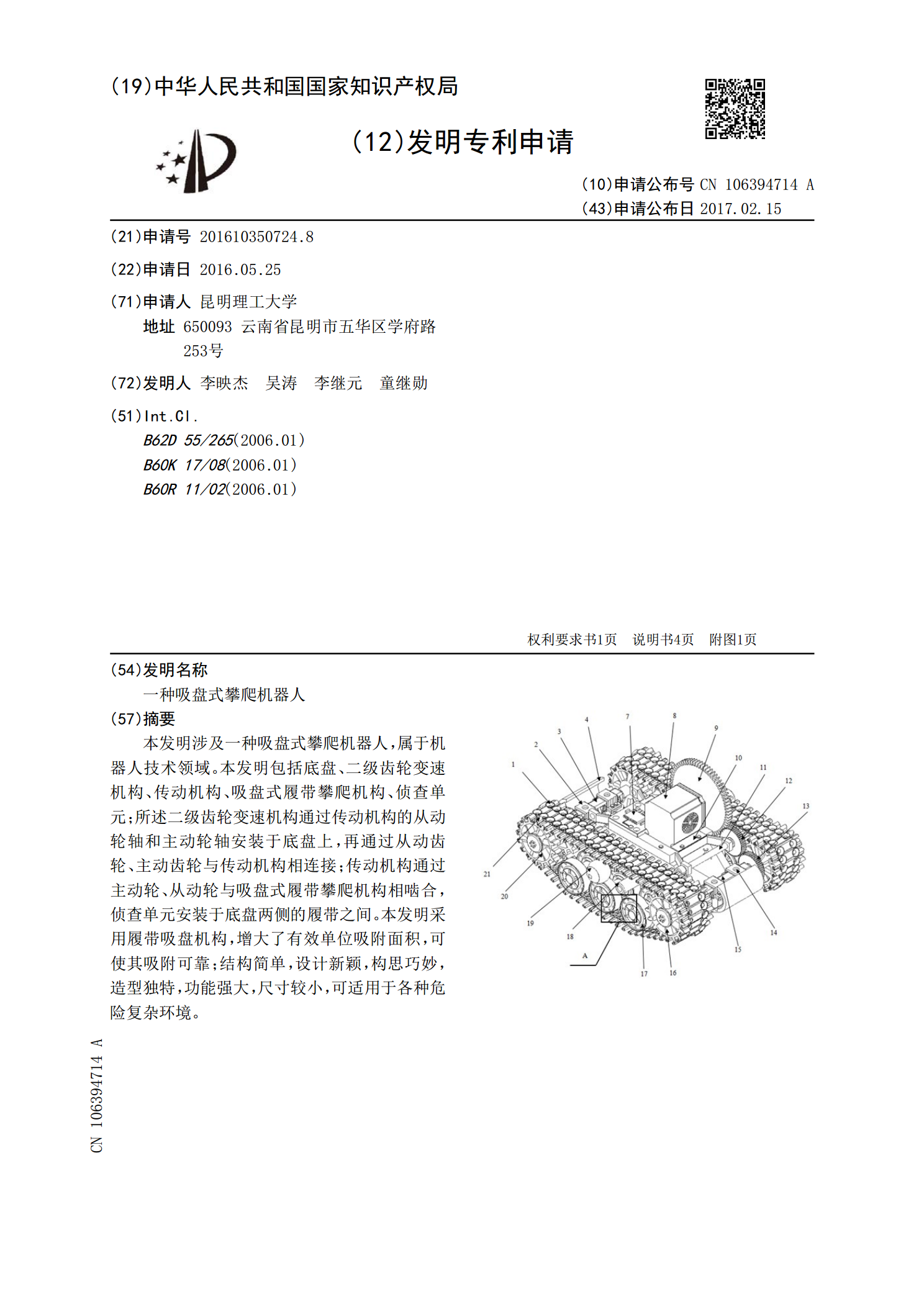
一种吸盘式攀爬机器人.pdf
本发明涉及一种吸盘式攀爬机器人,属于机器人技术领域。本发明包括底盘、二级齿轮变速机构、传动机构、吸盘式履带攀爬机构、侦查单元;所述二级齿轮变速机构通过传动机构的从动轮轴和主动轮轴安装于底盘上,再通过从动齿轮、主动齿轮与传动机构相连接;传动机构通过主动轮、从动轮与吸盘式履带攀爬机构相啮合,侦查单元安装于底盘两侧的履带之间。本发明采用履带吸盘机构,增大了有效单位吸附面积,可使其吸附可靠;结构简单,设计新颖,构思巧妙,造型独特,功能强大,尺寸较小,可适用于各种危险复杂环境。