
一种吸盘式攀爬机器人.pdf

努力****向丝


1/7

2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种吸盘式攀爬机器人.pdf
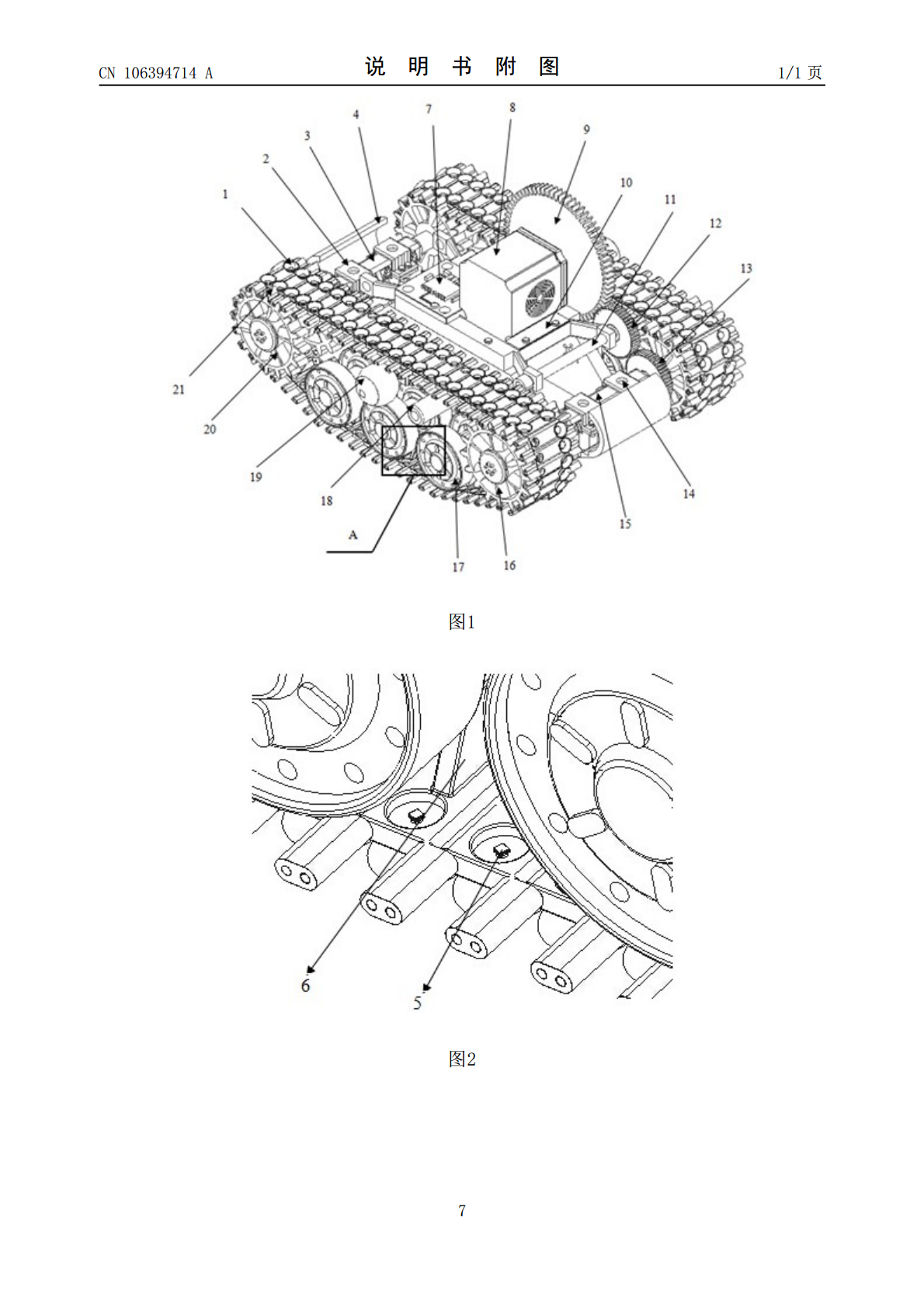
本发明涉及一种吸盘式攀爬机器人,属于机器人技术领域。本发明包括底盘、二级齿轮变速机构、传动机构、吸盘式履带攀爬机构、侦查单元;所述二级齿轮变速机构通过传动机构的从动轮轴和主动轮轴安装于底盘上,再通过从动齿轮、主动齿轮与传动机构相连接;传动机构通过主动轮、从动轮与吸盘式履带攀爬机构相啮合,侦查单元安装于底盘两侧的履带之间。本发明采用履带吸盘机构,增大了有效单位吸附面积,可使其吸附可靠;结构简单,设计新颖,构思巧妙,造型独特,功能强大,尺寸较小,可适用于各种危险复杂环境。
一种攀爬机器人及其攀爬方法.pdf
本发明公开了一种攀爬机器人及其攀爬方法。实现在垂直墙壁上稳定攀爬是机器人实现三维空间无障碍运动的关键技术之一。本发明一种攀爬机器装置,包括攀爬架、攀爬前进机构和攀爬爪部机构。攀爬前进机构包括回转动力源、运动摇杆、第一连杆、第二连杆、第一滑道、第二滑道、第一滑块和第二滑块。攀爬爪部机构包括固定外管、滑动内管、顶杆、收缩弹簧、攀爬勾爪、从动凸轮、滚轮、勾爪固定杆、顶杆活塞、固定销和销钉顶紧弹簧。本发明通过攀爬前进机构与攀爬爪部机构相配合,通过单个回转动力源的往复转动就实现了持续向上的攀爬动作。与传统的攀爬机器

一种攀爬机器人复合足端以及攀爬机器人.pdf
本发明公开了一种攀爬机器人复合足端以及攀爬机器人,属于机器人技术领域。本发明针对电塔本身具有的结构特征,对电塔上脚钉和角钢主材的合理利用,通过机械爪夹紧脚钉、电磁铁吸附角钢表面的方式来实现分别受力,使机器人能够稳定停留附着在角钢塔上,并且能够灵活抓取脚钉实现步进式攀登;本发明通过机械爪的抓取以及电磁铁的吸附能够很好地适应于角钢塔带有人工攀爬脚钉的主材部分的攀爬和停留,同时很好地让机器人维持在铁塔上进行相关巡检和检测工作。
一种攀爬机器人.pdf
本发明提供了一种攀爬机器人,涉及机器人技术领域,其包括铰接的第一攀爬臂和第二攀爬臂,第一攀爬臂和第二攀爬臂的端部均通过蜗轮蜗杆机构转动连接有攀爬爪部组件,攀爬爪部组件包括抓取部和吸附部;第一攀爬臂和第二攀爬臂的中部通过丝杆机构连接,第一攀爬臂上固定连接有挂钩机械臂,挂钩机械臂的端部可控吸附有安全挂钩。解决了现有技术中攀爬机器人攀爬稳定性差、控制难度大的问题。
一种攀爬机器人.pdf
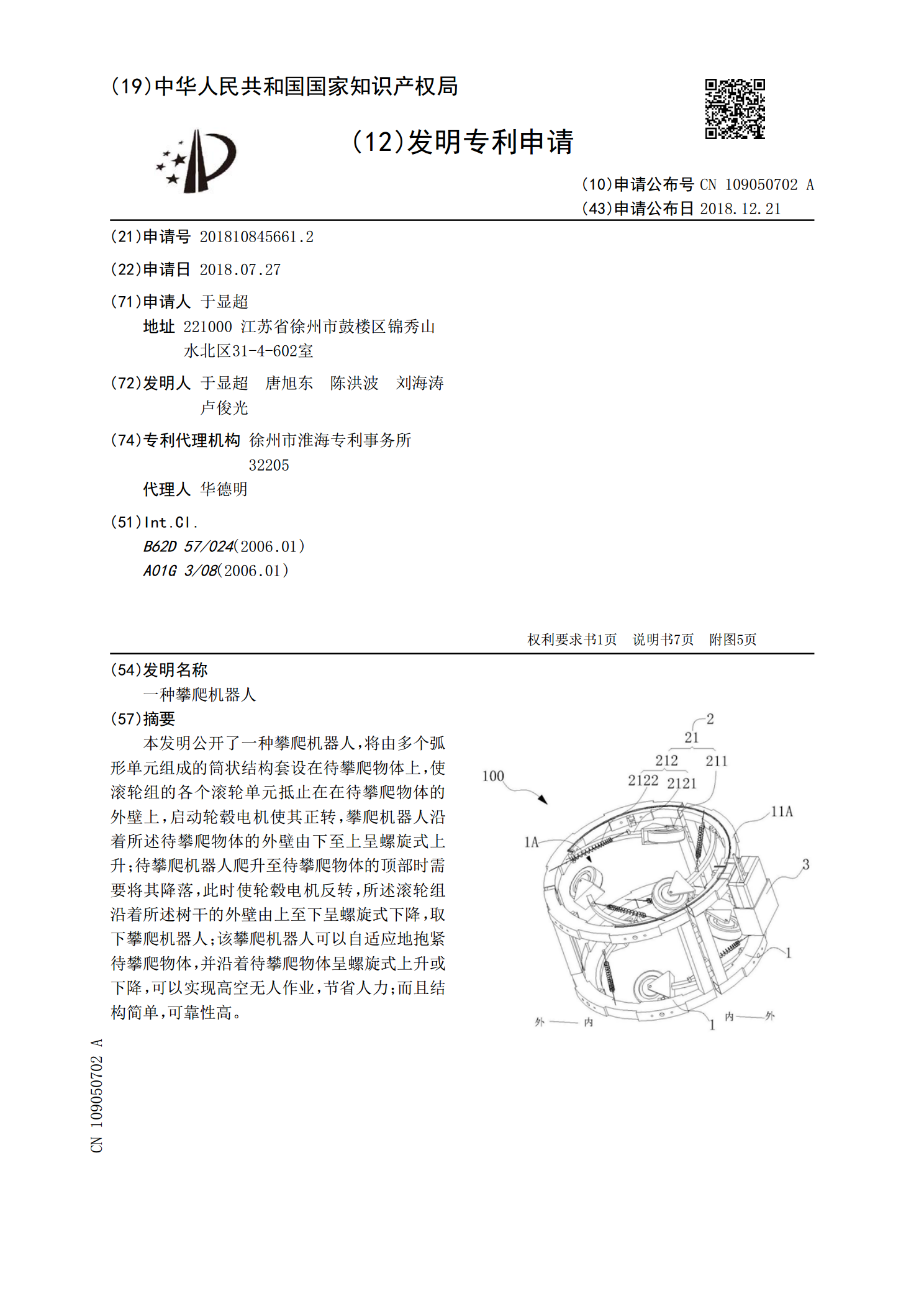
本发明公开了一种攀爬机器人,将由多个弧形单元组成的筒状结构套设在待攀爬物体上,使滚轮组的各个滚轮单元抵止在在待攀爬物体的外壁上,启动轮毂电机使其正转,攀爬机器人沿着所述待攀爬物体的外壁由下至上呈螺旋式上升;待攀爬机器人爬升至待攀爬物体的顶部时需要将其降落,此时使轮毂电机反转,所述滚轮组沿着所述树干的外壁由上至下呈螺旋式下降,取下攀爬机器人;该攀爬机器人可以自适应地抱紧待攀爬物体,并沿着待攀爬物体呈螺旋式上升或下降,可以实现高空无人作业,节省人力;而且结构简单,可靠性高。