
一种勾式攀爬机器人.pdf

睿达****的的

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种勾式攀爬机器人.pdf
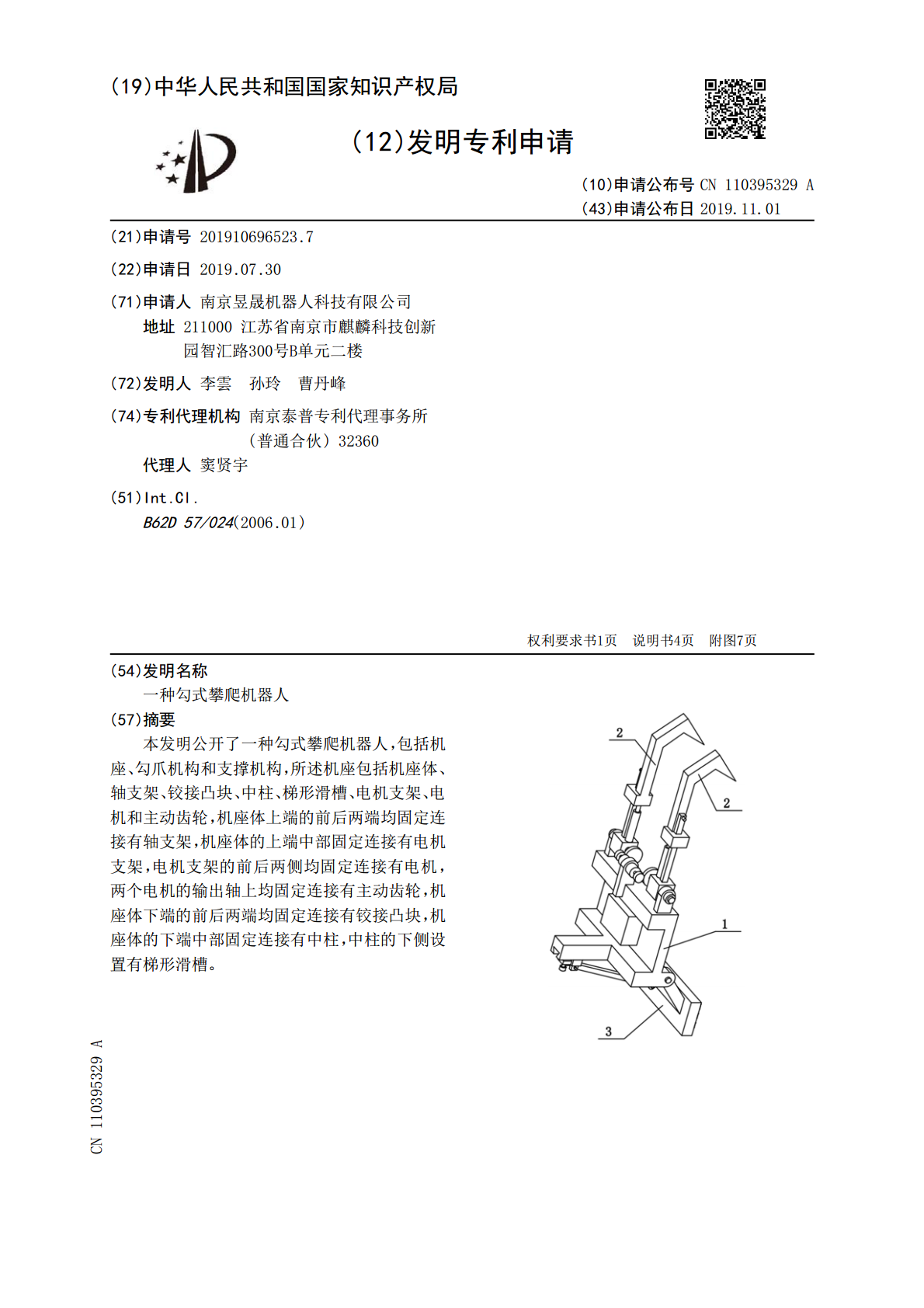
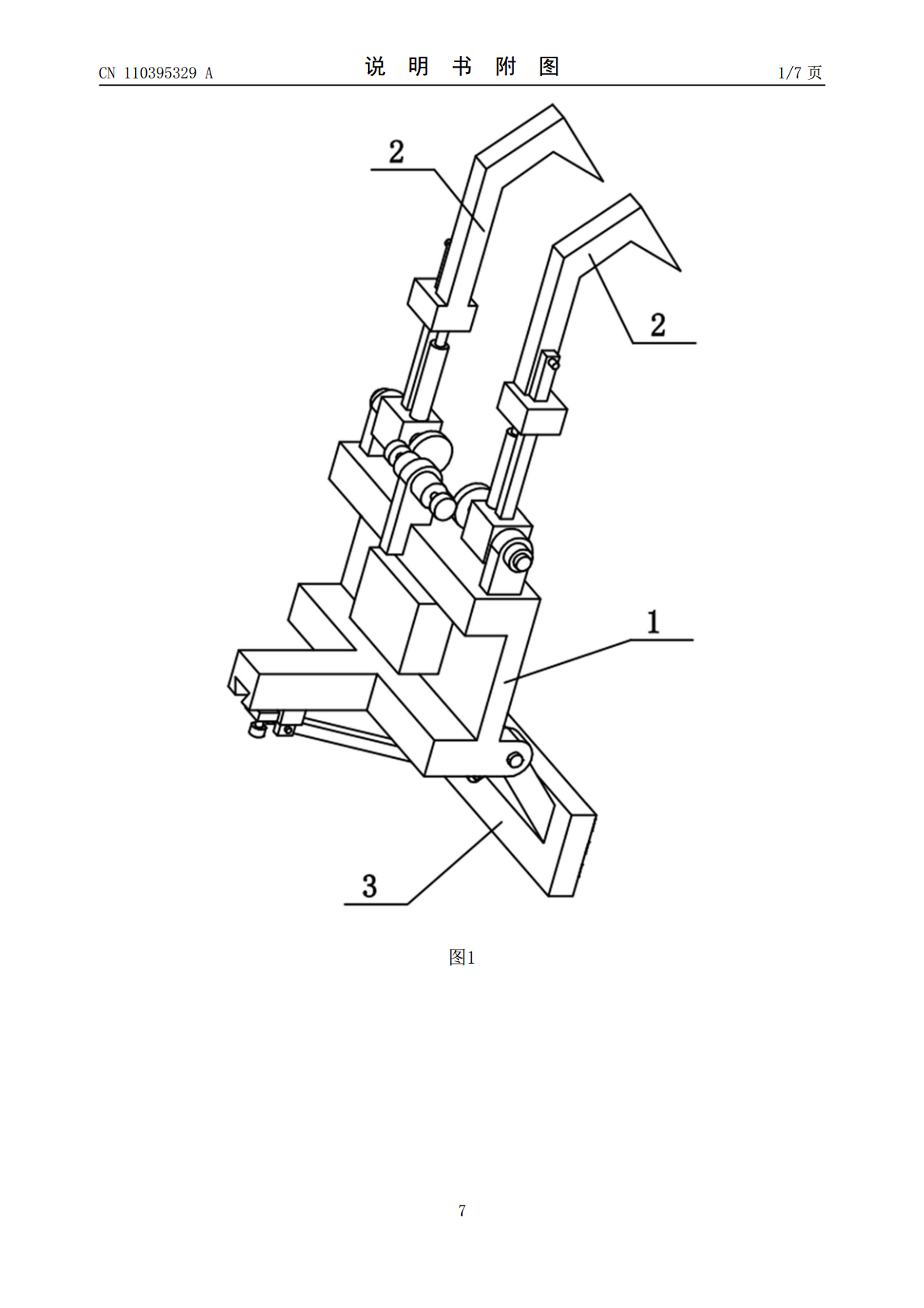
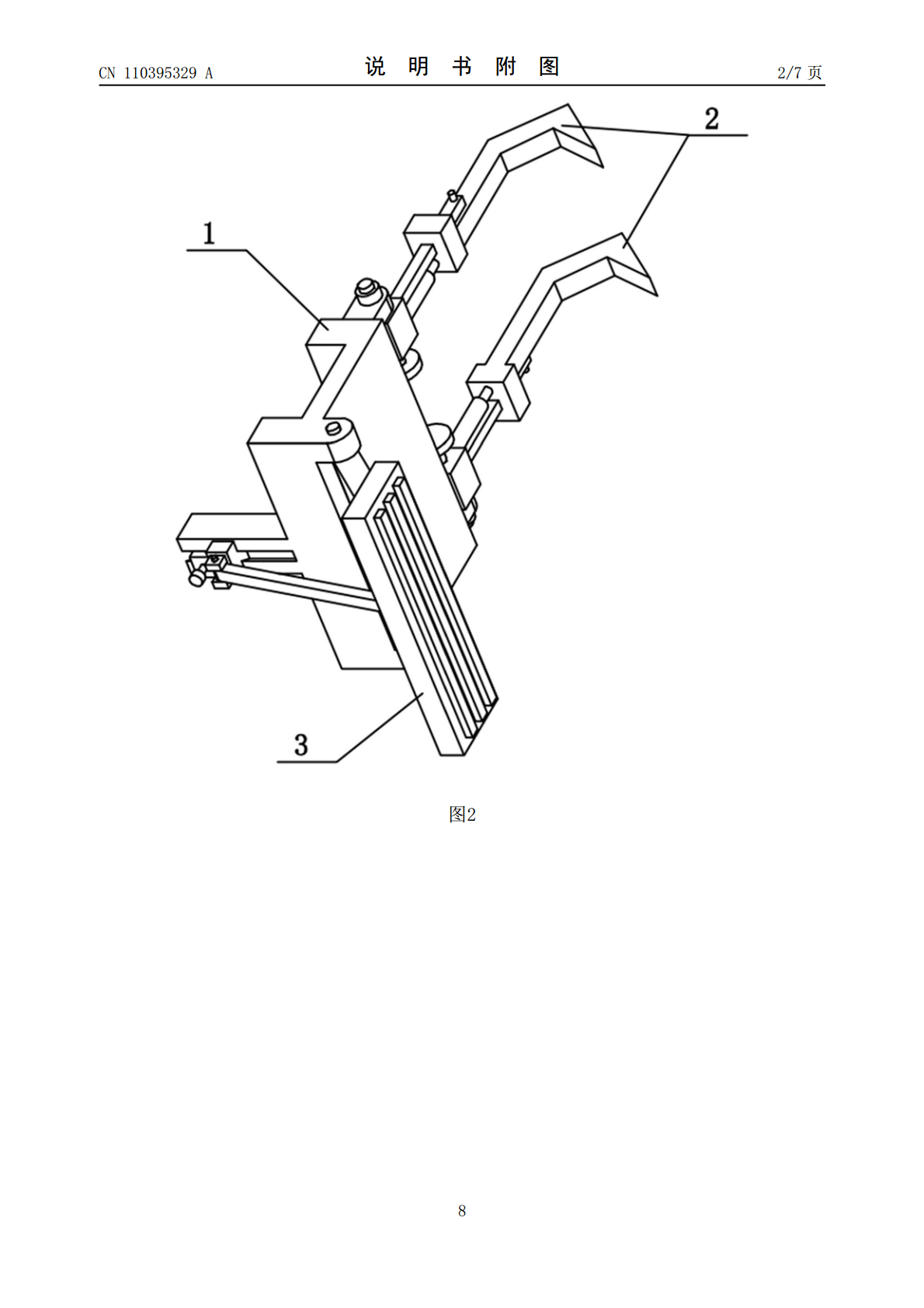
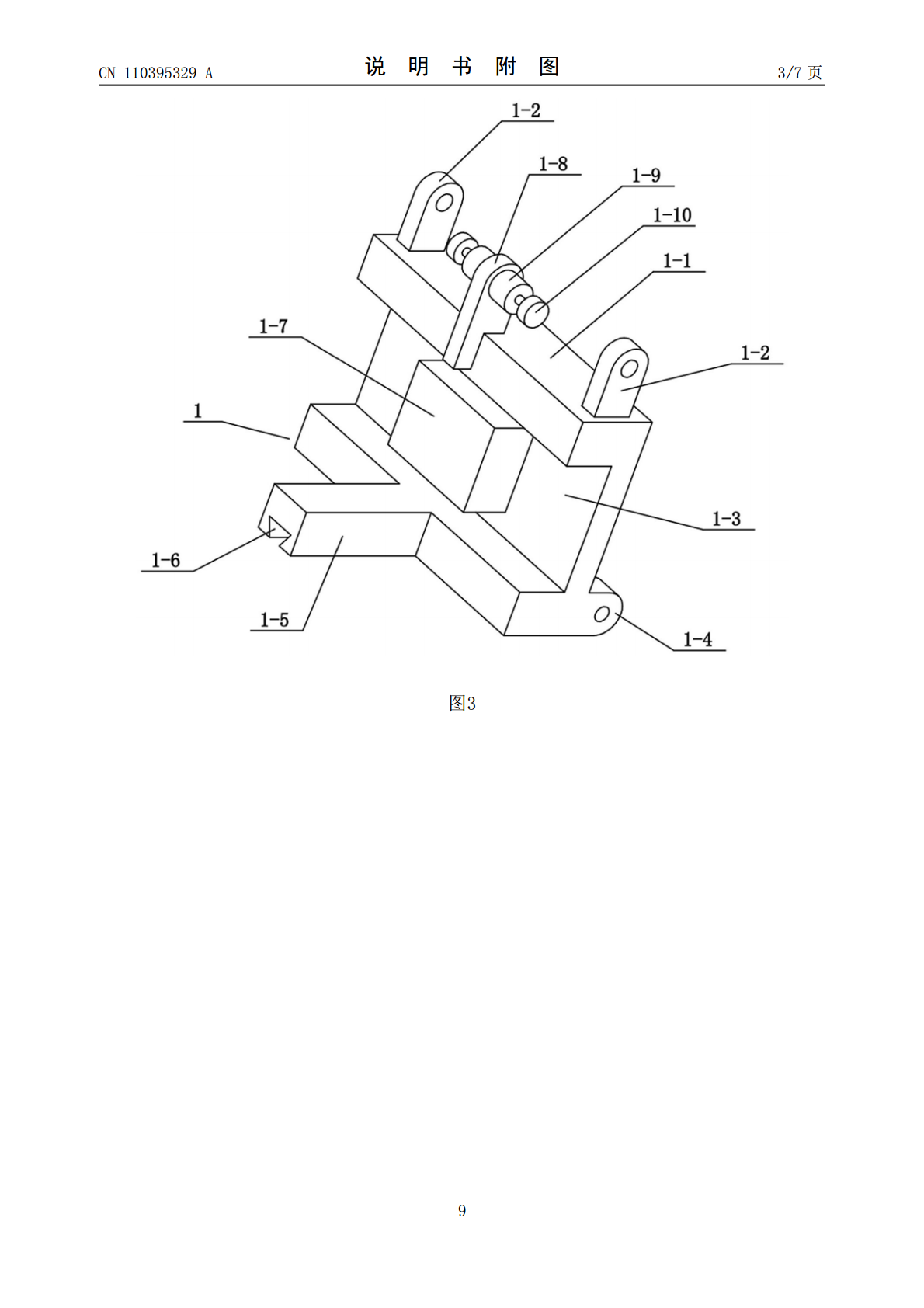
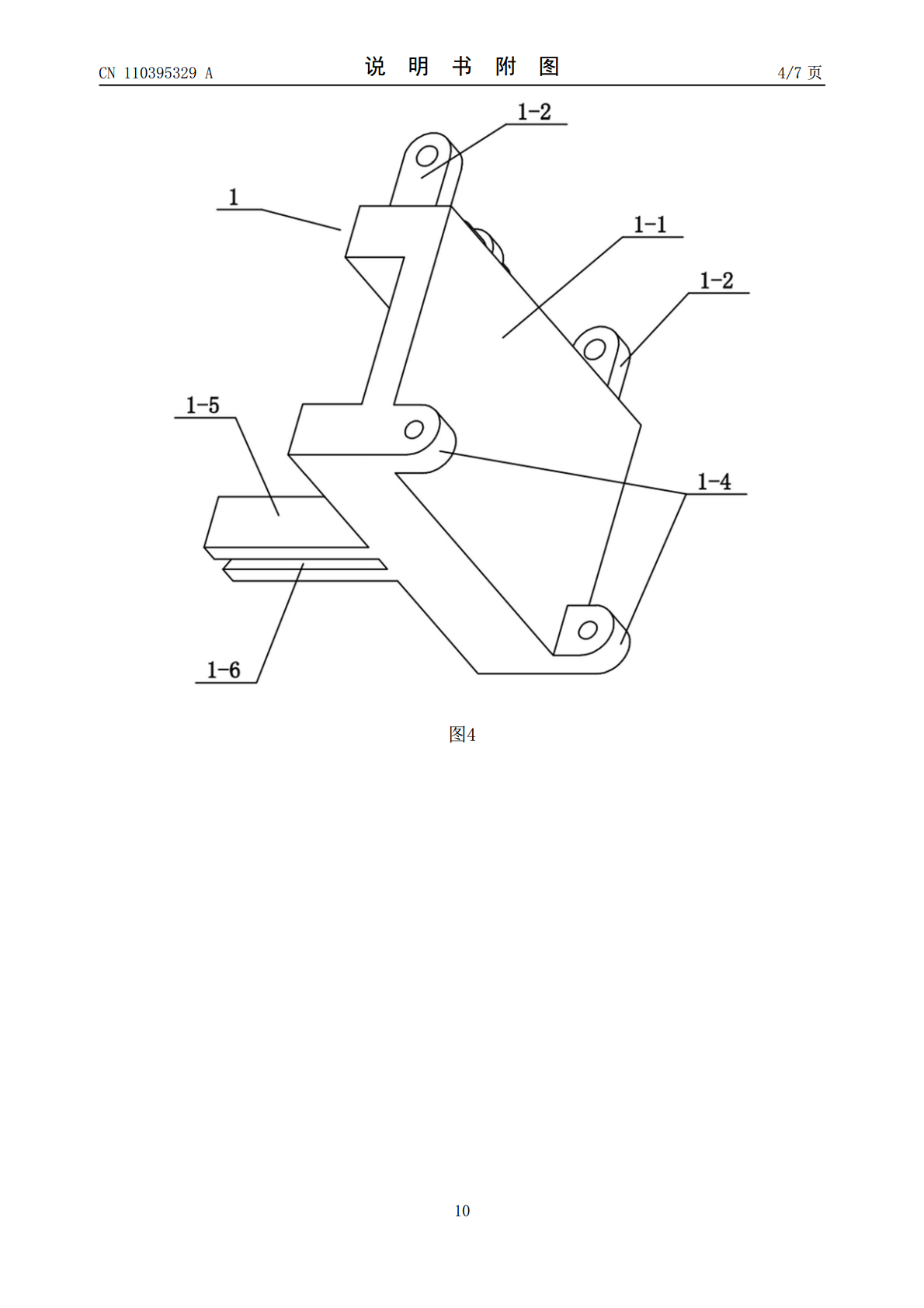
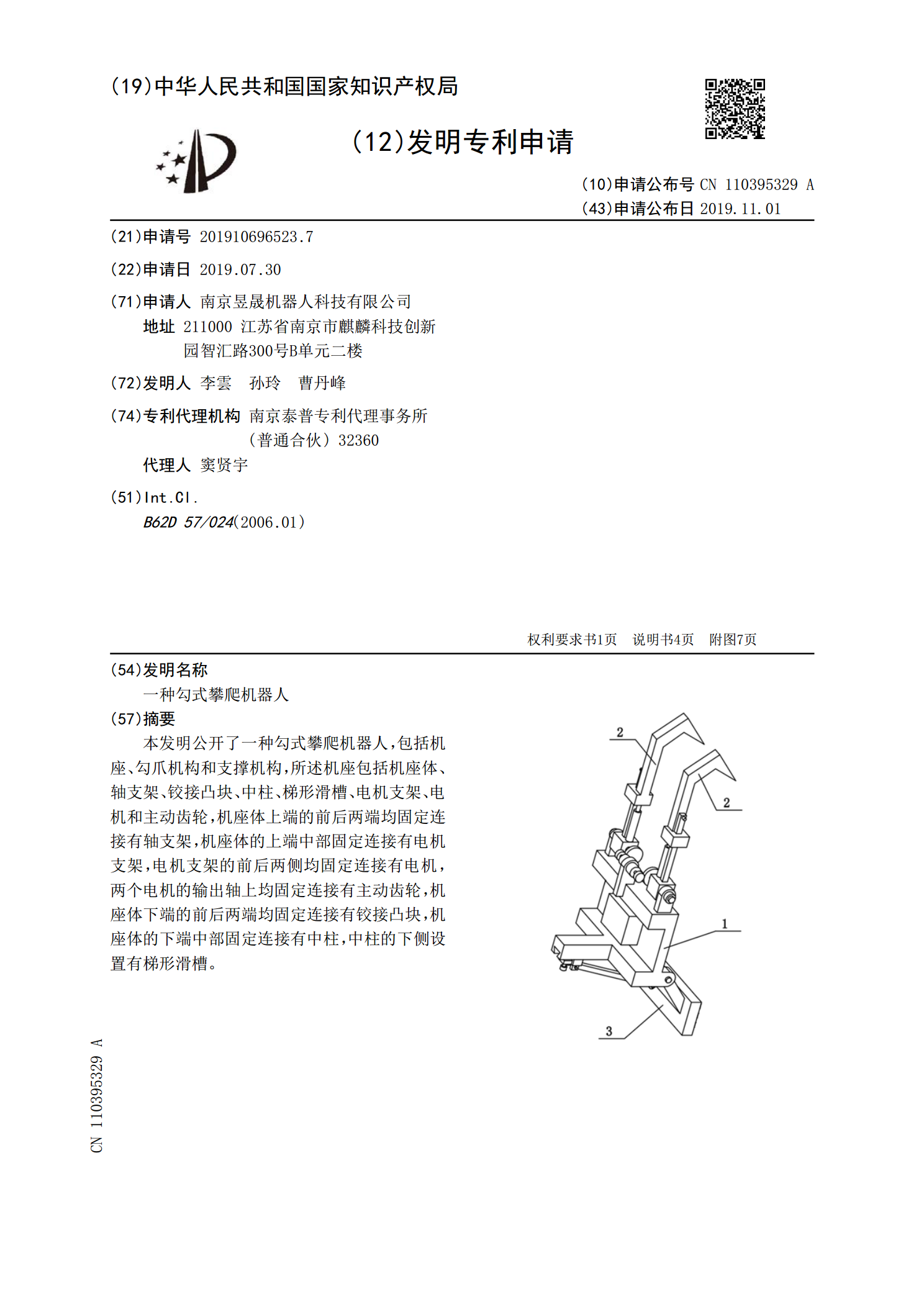
本发明公开了一种勾式攀爬机器人,包括机座、勾爪机构和支撑机构,所述机座包括机座体、轴支架、铰接凸块、中柱、梯形滑槽、电机支架、电机和主动齿轮,机座体上端的前后两端均固定连接有轴支架,机座体的上端中部固定连接有电机支架,电机支架的前后两侧均固定连接有电机,两个电机的输出轴上均固定连接有主动齿轮,机座体下端的前后两端均固定连接有铰接凸块,机座体的下端中部固定连接有中柱,中柱的下侧设置有梯形滑槽。
一种吸盘式攀爬机器人.pdf
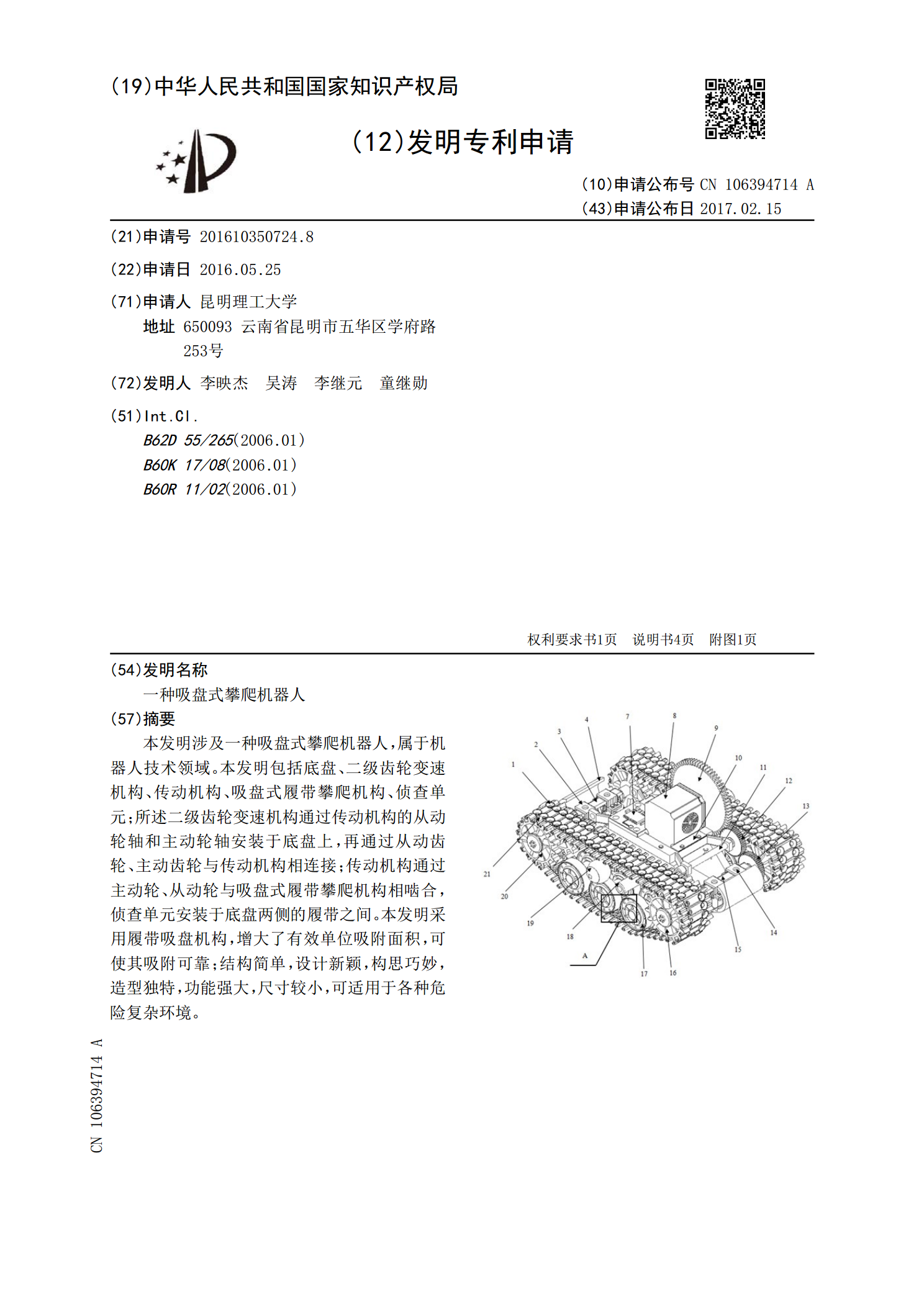
本发明涉及一种吸盘式攀爬机器人,属于机器人技术领域。本发明包括底盘、二级齿轮变速机构、传动机构、吸盘式履带攀爬机构、侦查单元;所述二级齿轮变速机构通过传动机构的从动轮轴和主动轮轴安装于底盘上,再通过从动齿轮、主动齿轮与传动机构相连接;传动机构通过主动轮、从动轮与吸盘式履带攀爬机构相啮合,侦查单元安装于底盘两侧的履带之间。本发明采用履带吸盘机构,增大了有效单位吸附面积,可使其吸附可靠;结构简单,设计新颖,构思巧妙,造型独特,功能强大,尺寸较小,可适用于各种危险复杂环境。
一种履带式攀爬机器人.pdf
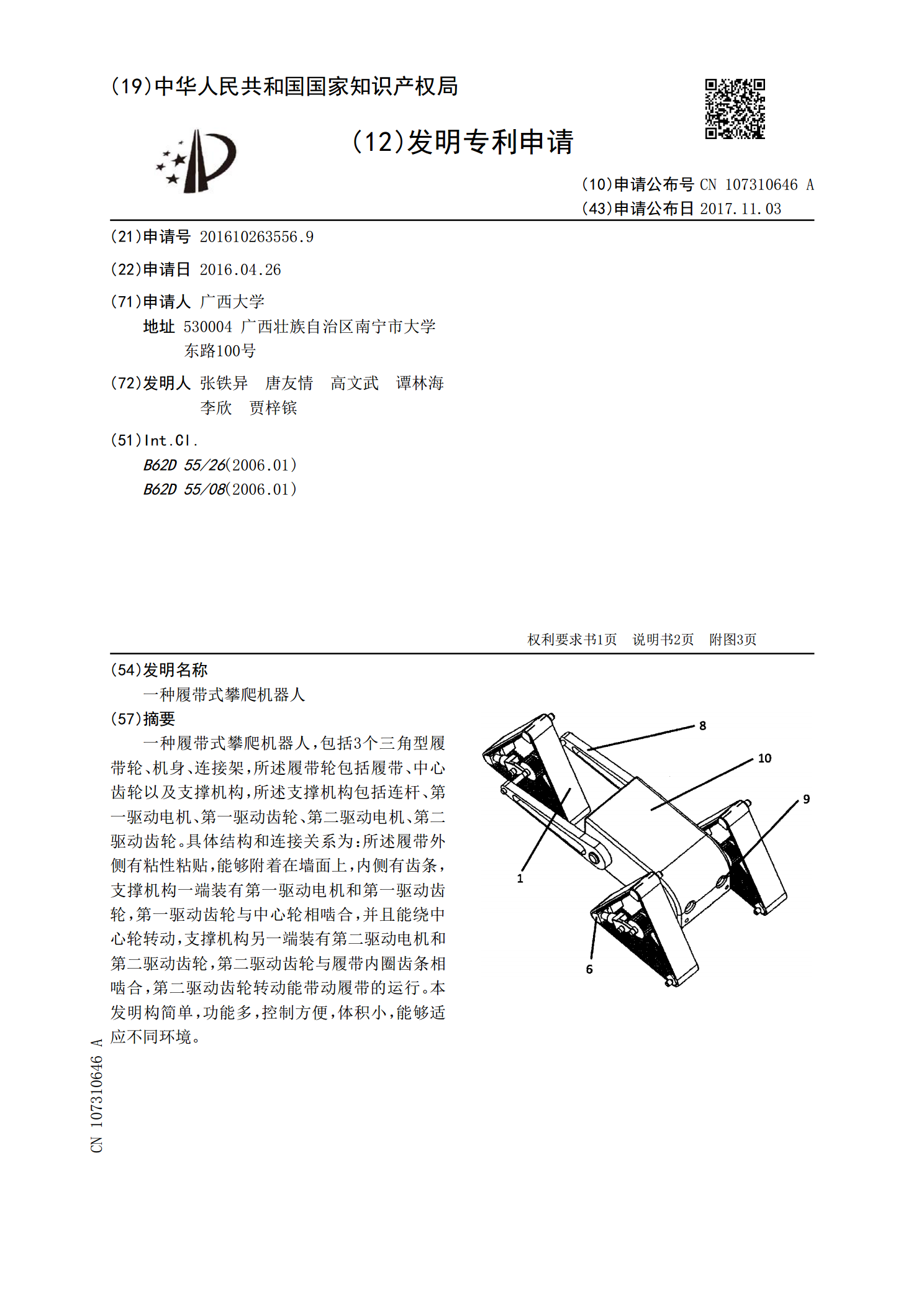
一种履带式攀爬机器人,包括3个三角型履带轮、机身、连接架,所述履带轮包括履带、中心齿轮以及支撑机构,所述支撑机构包括连杆、第一驱动电机、第一驱动齿轮、第二驱动电机、第二驱动齿轮。具体结构和连接关系为:所述履带外侧有粘性粘贴,能够附着在墙面上,内侧有齿条,支撑机构一端装有第一驱动电机和第一驱动齿轮,第一驱动齿轮与中心轮相啮合,并且能绕中心轮转动,支撑机构另一端装有第二驱动电机和第二驱动齿轮,第二驱动齿轮与履带内圈齿条相啮合,第二驱动齿轮转动能带动履带的运行。本发明构简单,功能多,控制方便,体积小,能够适应不
一种攀爬式墙面喷涂机器人.pdf
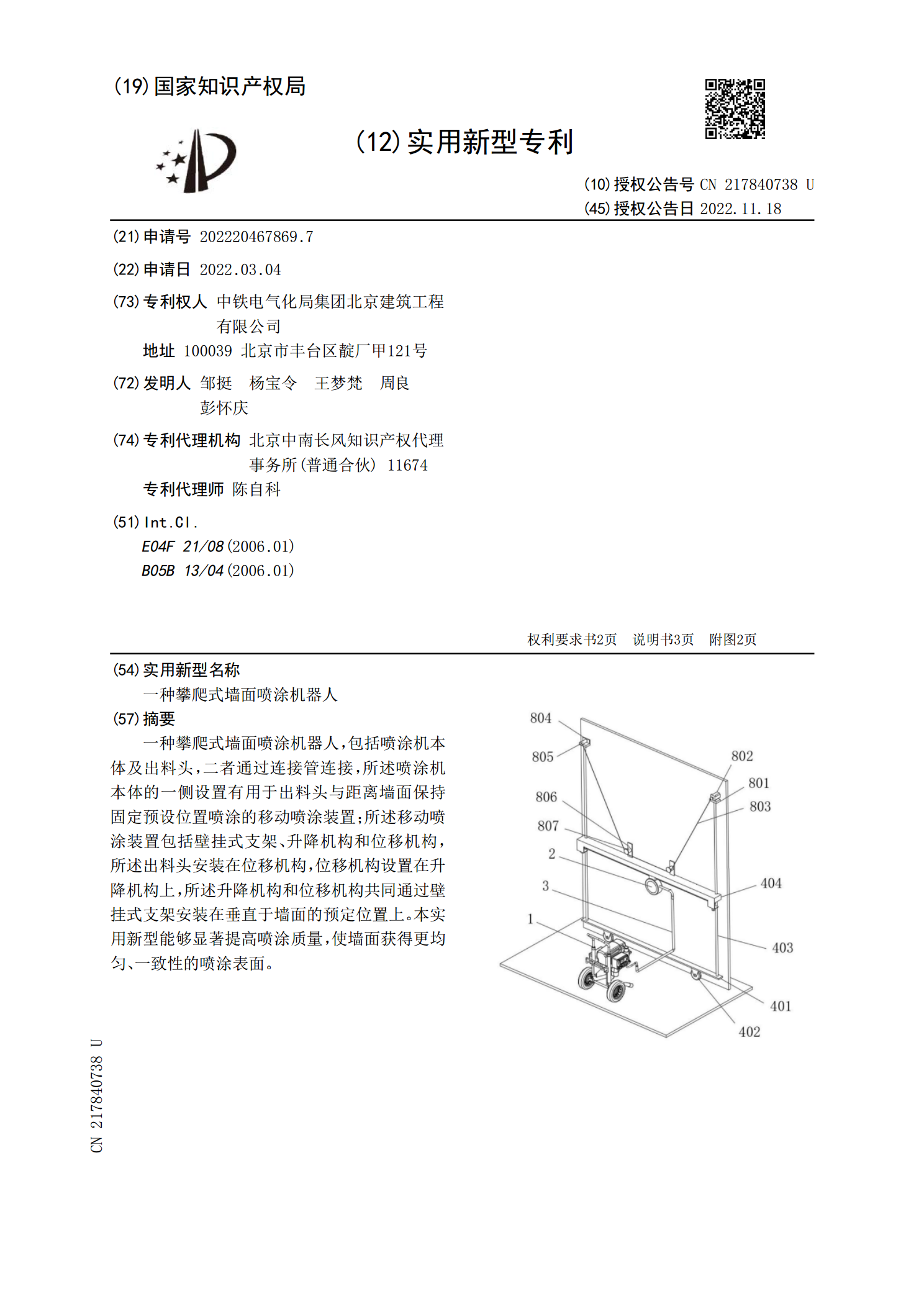
一种攀爬式墙面喷涂机器人,包括喷涂机本体及出料头,二者通过连接管连接,所述喷涂机本体的一侧设置有用于出料头与距离墙面保持固定预设位置喷涂的移动喷涂装置;所述移动喷涂装置包括壁挂式支架、升降机构和位移机构,所述出料头安装在位移机构,位移机构设置在升降机构上,所述升降机构和位移机构共同通过壁挂式支架安装在垂直于墙面的预定位置上。本实用新型能够显著提高喷涂质量,使墙面获得更均匀、一致性的喷涂表面。
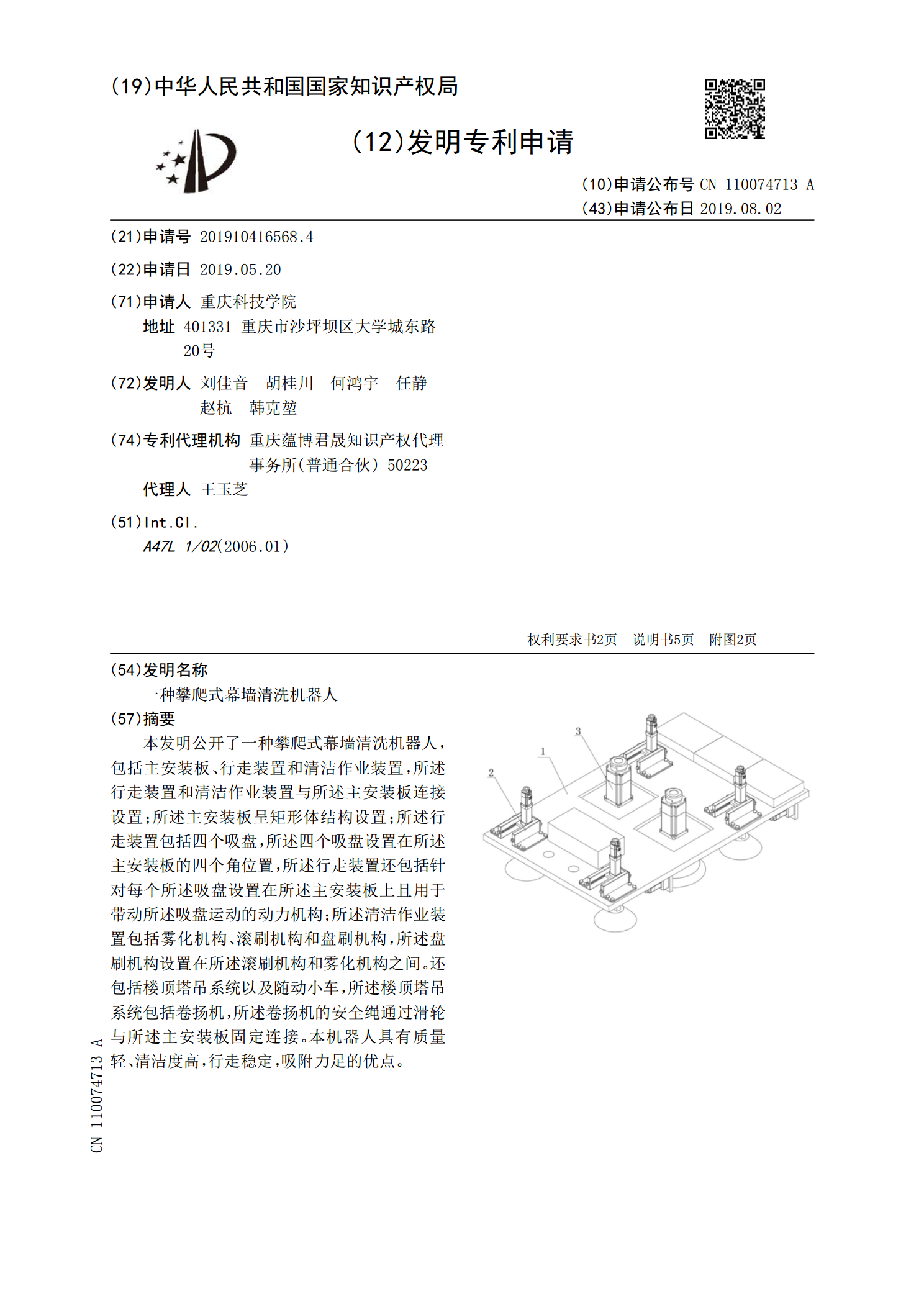
一种攀爬式幕墙清洗机器人.pdf
本发明公开了一种攀爬式幕墙清洗机器人,包括主安装板、行走装置和清洁作业装置,所述行走装置和清洁作业装置与所述主安装板连接设置;所述主安装板呈矩形体结构设置;所述行走装置包括四个吸盘,所述四个吸盘设置在所述主安装板的四个角位置,所述行走装置还包括针对每个所述吸盘设置在所述主安装板上且用于带动所述吸盘运动的动力机构;所述清洁作业装置包括雾化机构、滚刷机构和盘刷机构,所述盘刷机构设置在所述滚刷机构和雾化机构之间。还包括楼顶塔吊系统以及随动小车,所述楼顶塔吊系统包括卷扬机,所述卷扬机的安全绳通过滑轮与所述主安装板