
可全方位运动的全向轮.pdf

一吃****春晓


1/9

2/9

3/9
4/9

5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
可全方位运动的全向轮.pdf
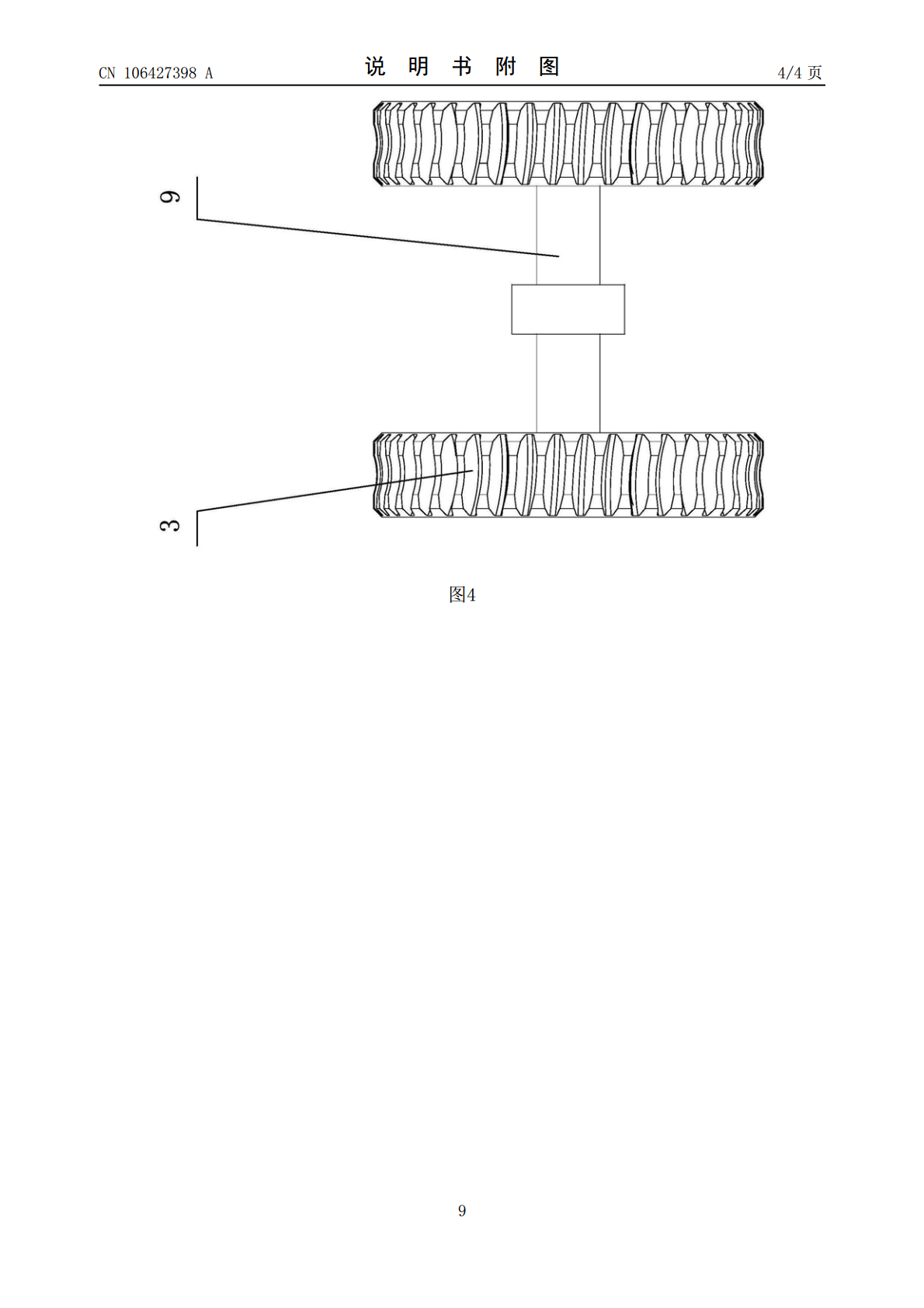
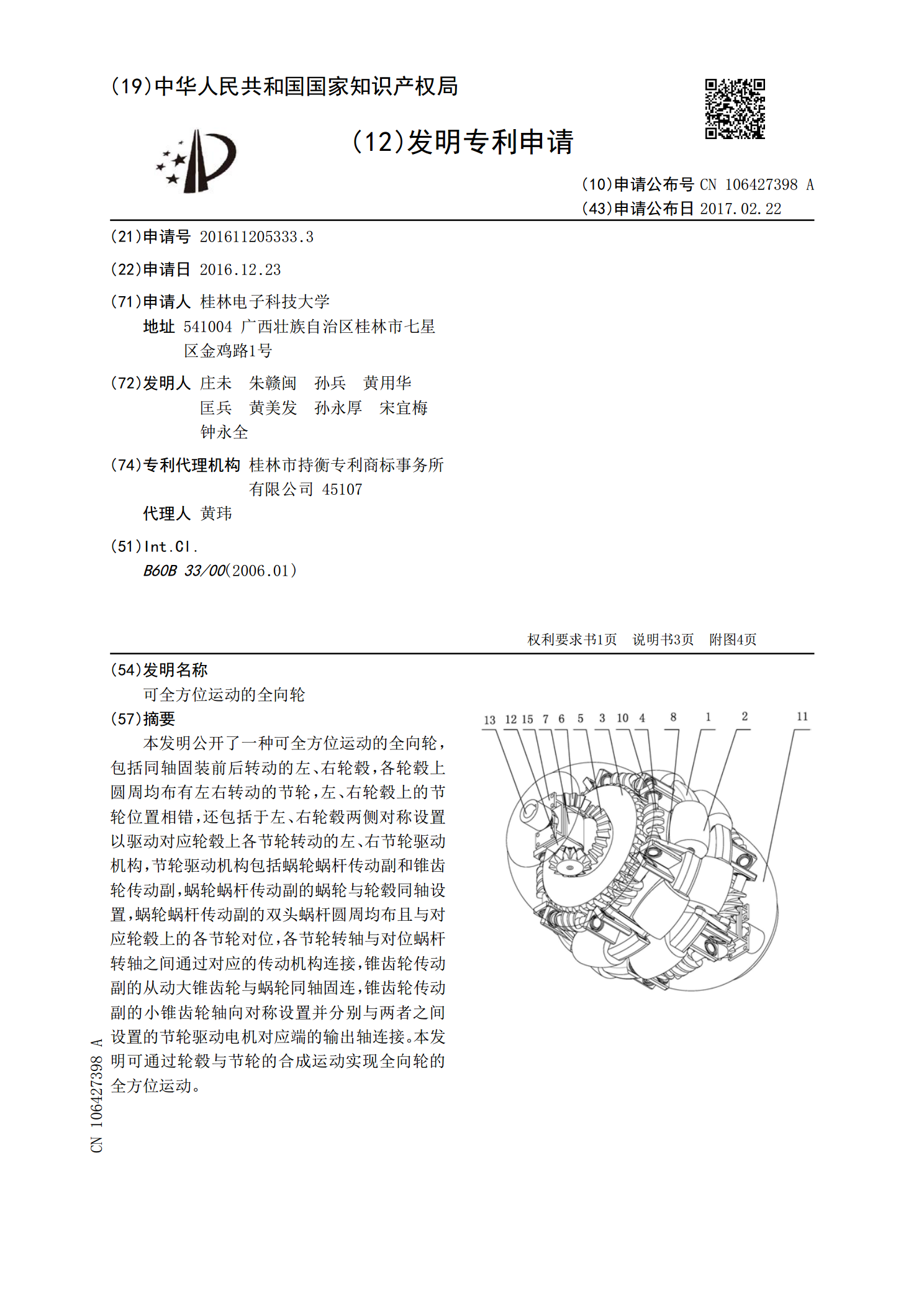
本发明公开了一种可全方位运动的全向轮,包括同轴固装前后转动的左、右轮毂,各轮毂上圆周均布有左右转动的节轮,左、右轮毂上的节轮位置相错,还包括于左、右轮毂两侧对称设置以驱动对应轮毂上各节轮转动的左、右节轮驱动机构,节轮驱动机构包括蜗轮蜗杆传动副和锥齿轮传动副,蜗轮蜗杆传动副的蜗轮与轮毂同轴设置,蜗轮蜗杆传动副的双头蜗杆圆周均布且与对应轮毂上的各节轮对位,各节轮转轴与对位蜗杆转轴之间通过对应的传动机构连接,锥齿轮传动副的从动大锥齿轮与蜗轮同轴固连,锥齿轮传动副的小锥齿轮轴向对称设置并分别与两者之间设置的节轮驱
全方位复合式驱动全向轮.pdf
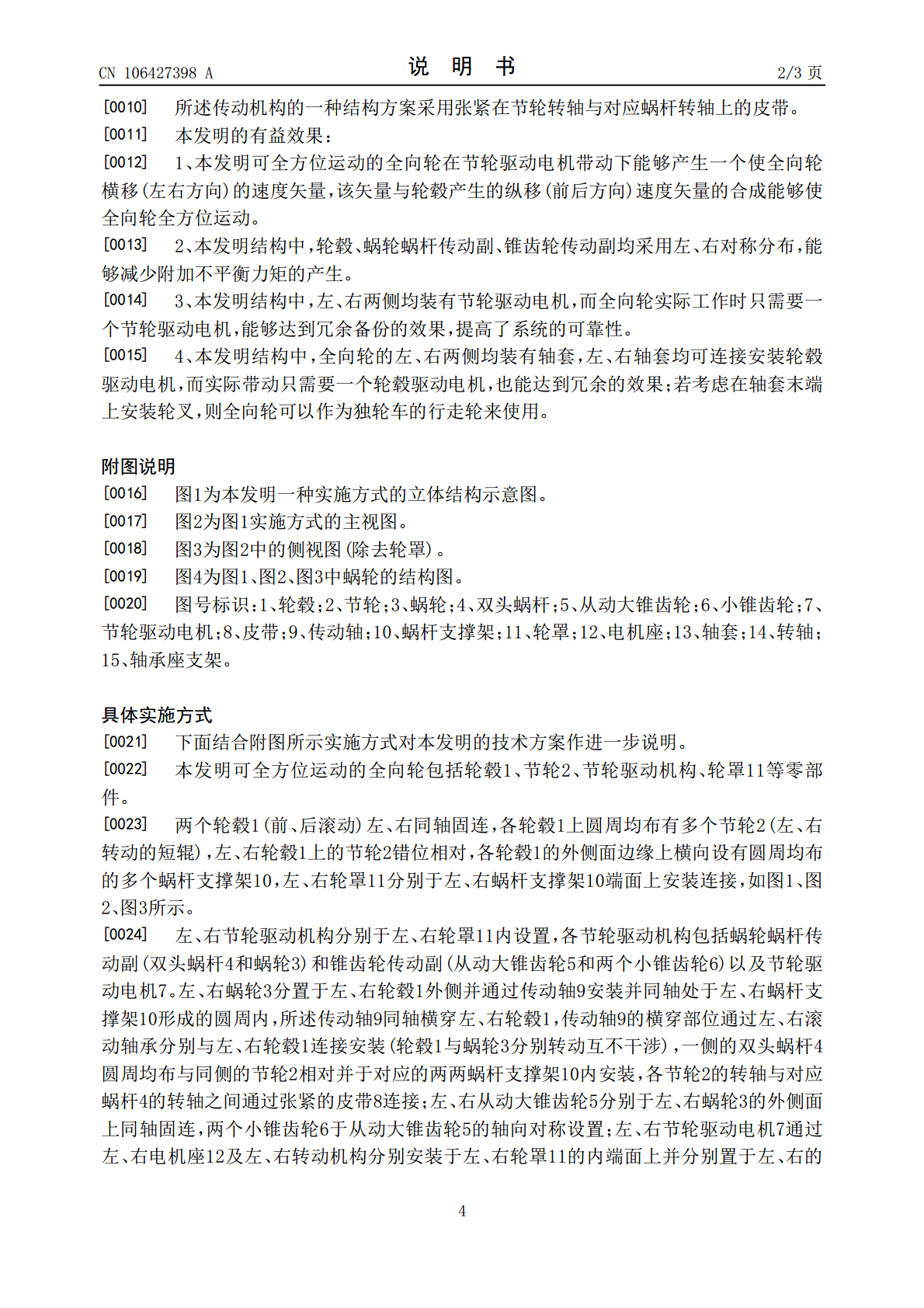
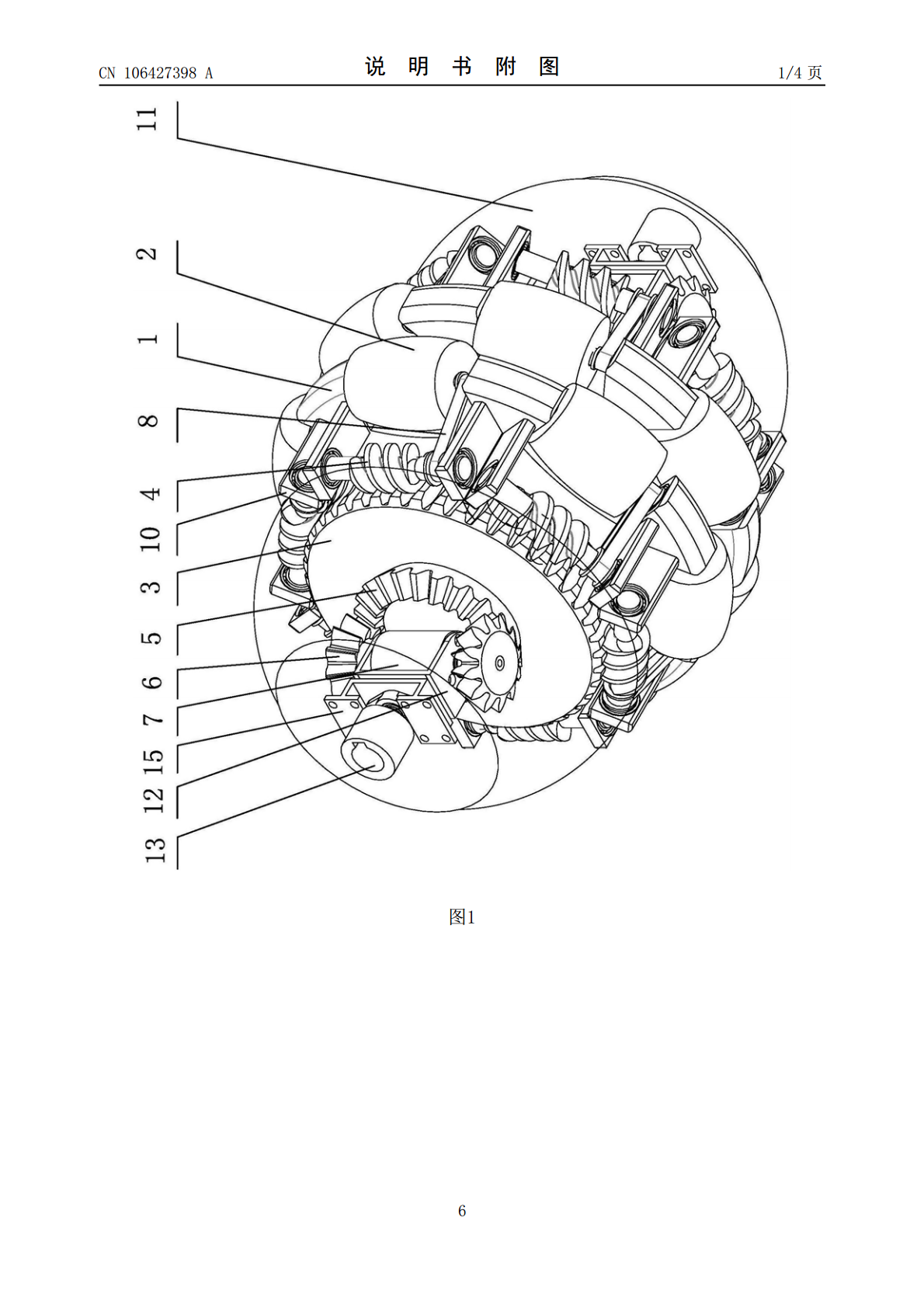
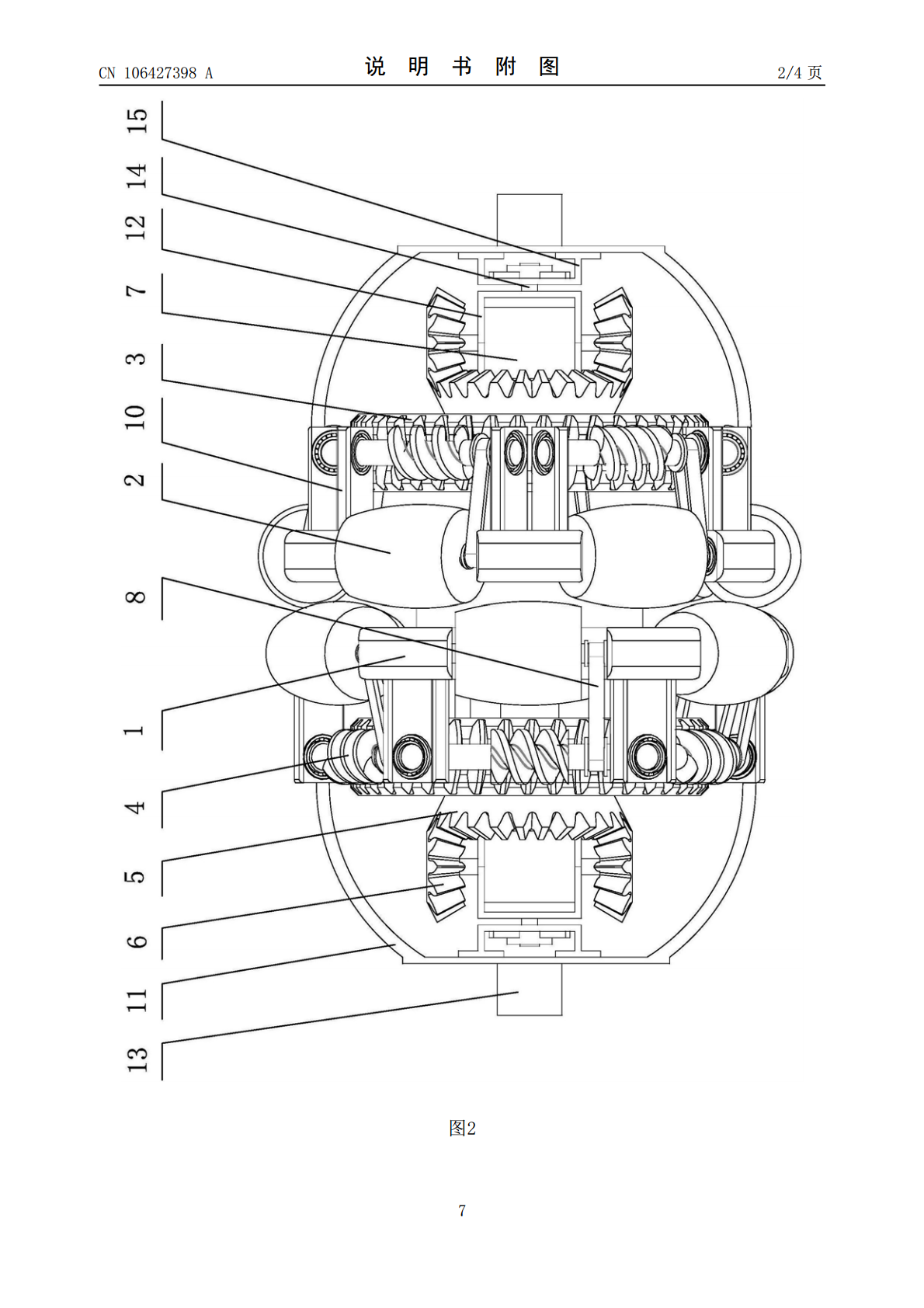
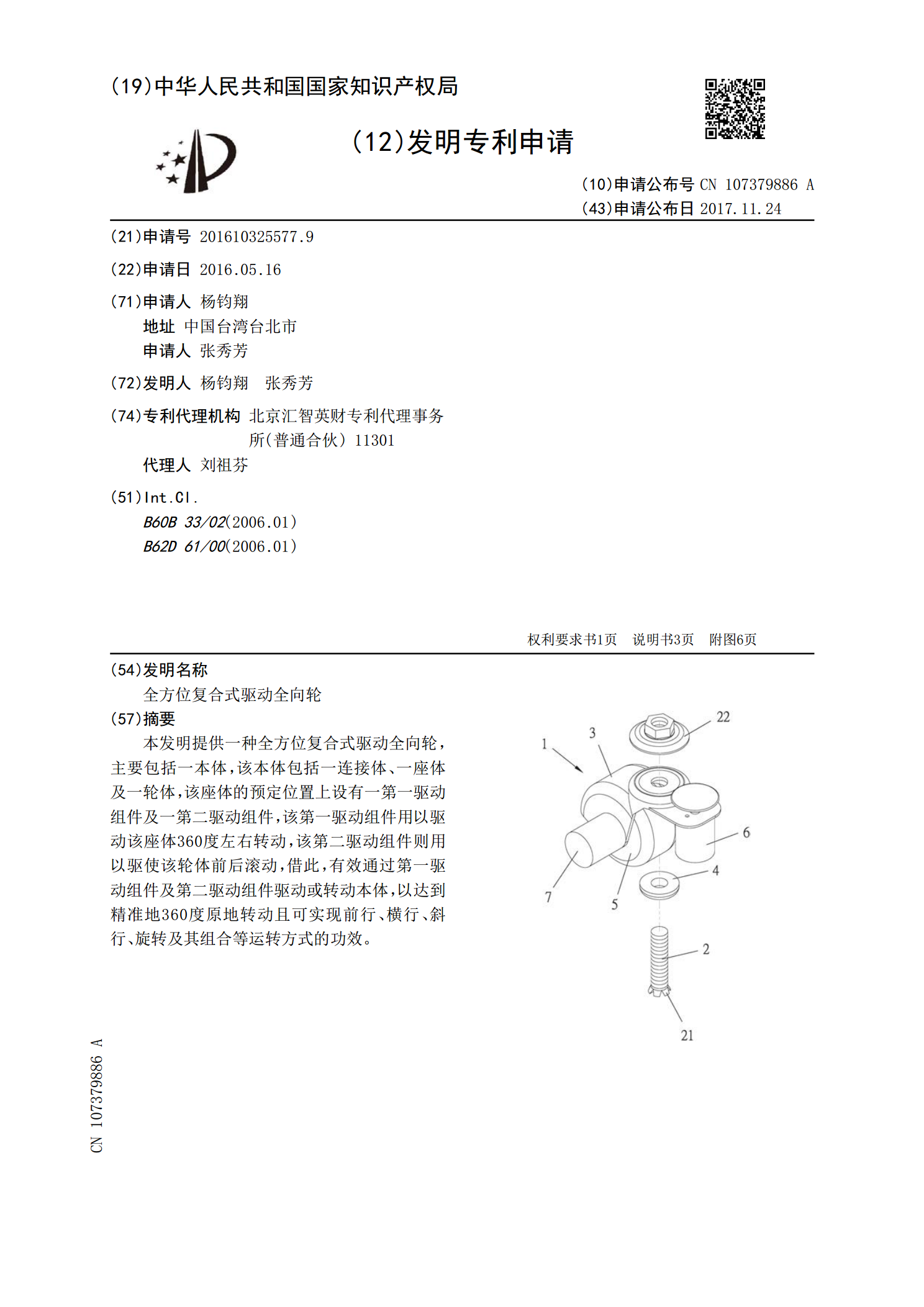
本发明提供一种全方位复合式驱动全向轮,主要包括一本体,该本体包括一连接体、一座体及一轮体,该座体的预定位置上设有一第一驱动组件及一第二驱动组件,该第一驱动组件用以驱动该座体360度左右转动,该第二驱动组件则用以驱使该轮体前后滚动,借此,有效通过第一驱动组件及第二驱动组件驱动或转动本体,以达到精准地360度原地转动且可实现前行、横行、斜行、旋转及其组合等运转方式的功效。

一种全方位轮及使用该全方位轮的全向移动平台.pdf
本发明涉及运动机构领域,尤其是一种全方位轮及使用该全方位轮的全向移动平台。全方位轮包括轮毂及通过辊子轴装配在轮毂上的整体式辊子,辊子轴的两端凸出于对应的辊子且该凸出于辊子的部分上设有外螺纹,轮毂包括相对设置的左、右支撑转盘以及同轴连接在左、右两支撑转盘之间的轴套,辊子轴的一端插装在左支撑转盘上设置的安装孔中并通过螺母固定,右支撑转盘在辊子轴固定在左支撑转盘上后靠拢轴套并与轴套可拆的固定连接,右支撑转盘上设有用于在右支撑转盘从右向左向轴套靠拢的过程中为辊子轴相对于右支撑转盘的活动让位的让位孔,辊子轴远离左支

一种全向轮、全向轮组件及可移动装置.pdf
本发明公开了一种全向轮、全向轮组件及可移动装置,其中全向轮包括轮毂和多个从动轮,轮毂的外周上设置多个安装齿,相邻的两个安装齿之间形成容纳从动轮的安装槽,各安装齿上均设置两个固定槽,固定槽的一端贯穿轮毂端面形成插入口,从动轮呈圆柱状,从动轮套接在中轴上,中轴两端伸出到从动轮外部,中轴两端置于两侧的固定槽内,还包括固定板,固定板盖合插入口并固定在安装齿上,使中轴限制在固定槽内。本发明所述的全向轮通过固定板将从动轮的中轴固定在轮毂的固定槽内,安装方式简单,安装后便于维护;限位结构有效防止固定板的移动,使全向轮的

全向轮运动平台分析.docx
全轮转向式小车一、坐标系与位置表示图1地理坐标系与体坐标系定义如图所示的坐标系,地理坐标系{XI,YI},体坐标系{XR,YR},坐标之间夹角为θ,P点位置描述为εI=xyθ由地理坐标转为体坐标的映射由正交旋转矩阵完成εR=RθεI=cosθsinθ0-sinθcosθ0001xyθ反方向变换矩阵如下Rθ-1=cosθ-sinθ0sinθcosθ0001二、运动学模型与控制律2.1全向轮直角坐标运动学方程图2轨迹跟踪示意图坐标系参照图2,对于地理坐标中的位置指令pI=(xryrθr)和速度指令qI=(vr