
基于四轮驱动的电动汽车稳定控制系统及方法及电动汽车.pdf

小寄****淑k

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于四轮驱动的电动汽车稳定控制系统及方法及电动汽车.pdf
在本发明公开的基于四轮驱动的电动汽车稳定控制系统中,第一稳定控制单元判断侧向加速度是否小于预设的加速度阀值。若否,第一稳定控制单元根据侧向加速度信号计算横向载荷转移率,并根据横向载荷转移率判断车辆状态。若车辆有第一趋势,第二稳定控制单元控制电动汽车车身保持稳定。若车辆有第二趋势,第一稳定控制单元通过电机控制器控制电机对车辆的外侧前轮施加制动力。若车辆有第三趋势,第一稳定控制单元通过电机控制器控制电机对外侧前轮及车辆的内侧后轮施加制动力。上述稳定控制系统中,第一稳定控制单元根据车辆的不同状态,采取对应的稳定

基于四轮驱动的电动汽车的制动系统及方法及电动汽车.pdf
在本发明公开的基于四轮驱动的电动汽车的制动系统中,第一制动控制单元根据电动汽车的制动模式、电池包的剩余电量及车速通过电机控制器控制电机对车轮制动,第二制动控制单元根据电动汽车的制动模式、电池包的剩余电量及车速控制制动执行机构对车轮制动。第一制动控制单元判断制动执行机构对车轮的制动是否失效。若失效,第一制动控制单元通过电机控制器控制电机对相应的车轮制动。上述制动系统中,第一制动控制单元可采取不同的制动手段,使电机制动及制动执行机构制动相互协作。同时,在制动执行机构对车轮的制动失效时,第一制动控制单元能够控制
一种四轮驱动电动汽车转向稳定控制方法.pdf
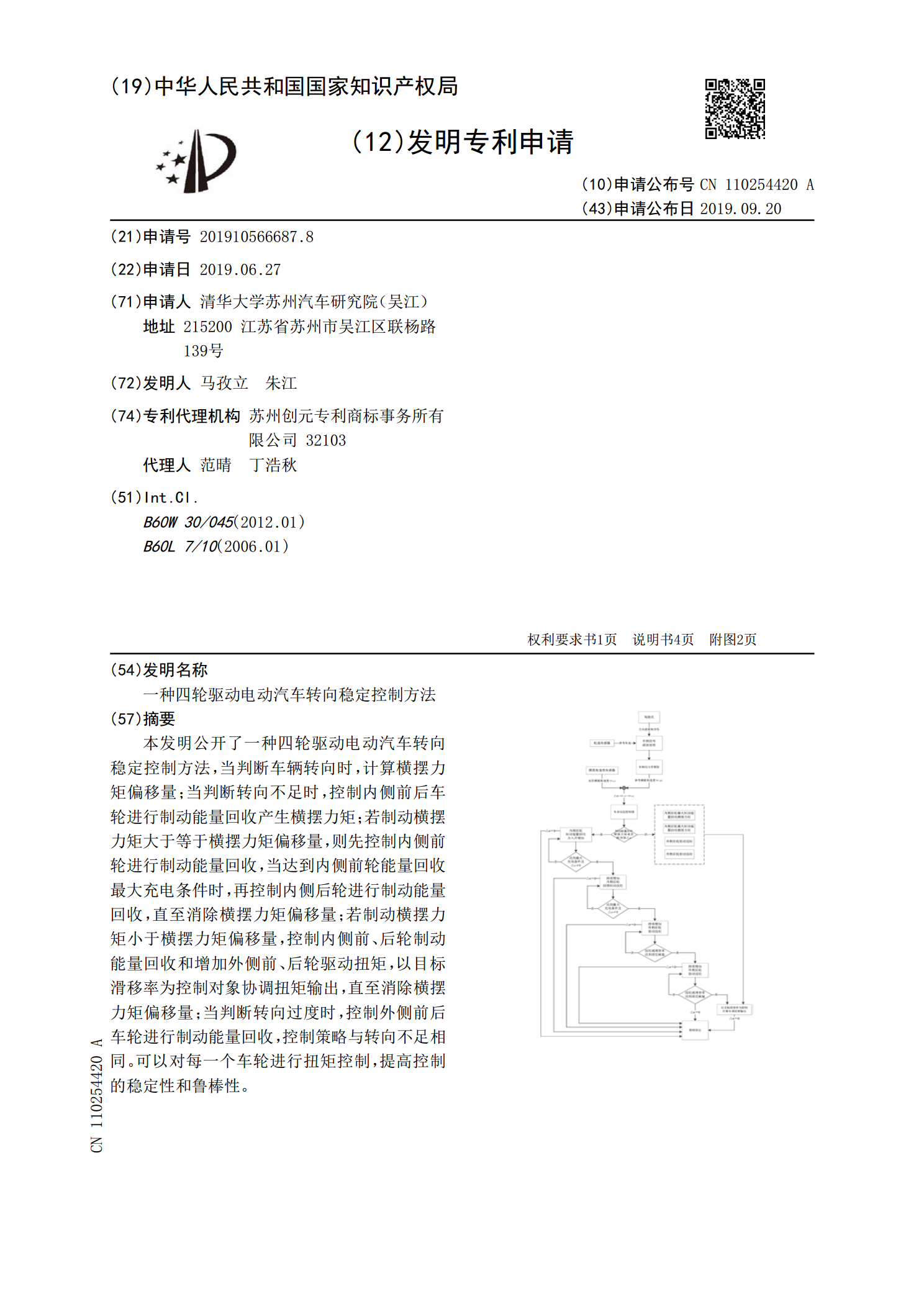
本发明公开了一种四轮驱动电动汽车转向稳定控制方法,当判断车辆转向时,计算横摆力矩偏移量;当判断转向不足时,控制内侧前后车轮进行制动能量回收产生横摆力矩;若制动横摆力矩大于等于横摆力矩偏移量,则先控制内侧前轮进行制动能量回收,当达到内侧前轮能量回收最大充电条件时,再控制内侧后轮进行制动能量回收,直至消除横摆力矩偏移量;若制动横摆力矩小于横摆力矩偏移量,控制内侧前、后轮制动能量回收和增加外侧前、后轮驱动扭矩,以目标滑移率为控制对象协调扭矩输出,直至消除横摆力矩偏移量;当判断转向过度时,控制外侧前后车轮进行制动
电动汽车、电动汽车车身稳定方法和系统.pdf
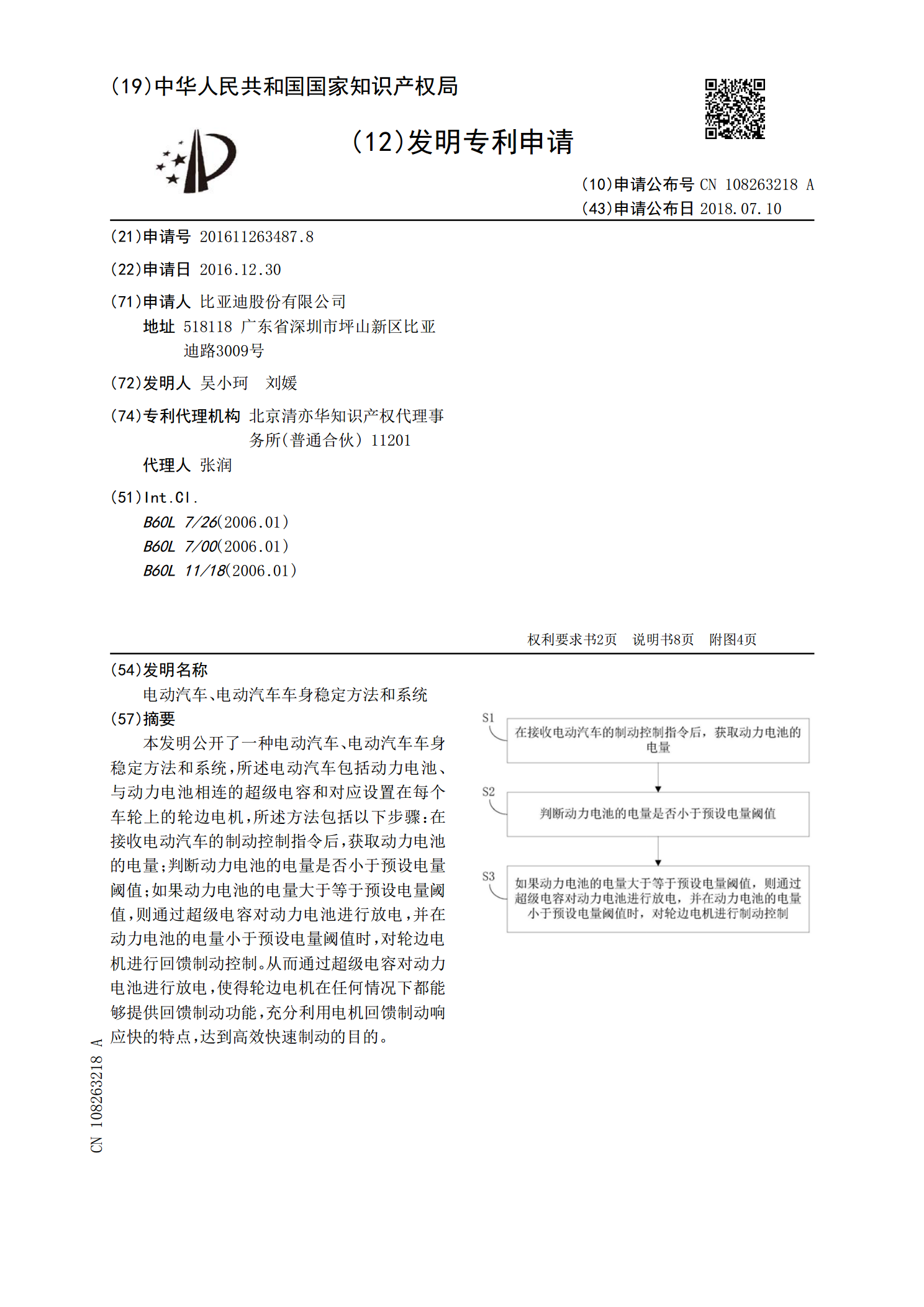
本发明公开了一种电动汽车、电动汽车车身稳定方法和系统,所述电动汽车包括动力电池、与动力电池相连的超级电容和对应设置在每个车轮上的轮边电机,所述方法包括以下步骤:在接收电动汽车的制动控制指令后,获取动力电池的电量;判断动力电池的电量是否小于预设电量阈值;如果动力电池的电量大于等于预设电量阈值,则通过超级电容对动力电池进行放电,并在动力电池的电量小于预设电量阈值时,对轮边电机进行回馈制动控制。从而通过超级电容对动力电池进行放电,使得轮边电机在任何情况下都能够提供回馈制动功能,充分利用电机回馈制动响应快的特点,

四轮驱动电动汽车路面附着系数估计方法.pdf
一种四轮驱动电动汽车路面附着系数估计方法,属于控制技术领域。本发明的目的是首先提出两种估计策略,设计最终估计器将二者综合,获取方法一利用附着系数在均值以上的点,代入方法二,获取准确有效的路面附着系数估计信息的四轮驱动电动汽车路面附着系数估计方法。本发明步骤是:基于公式法的路面附着系数估计,基于公式变形的路面附着系数估计,算法融合。本发明使估计方法更能应用于复杂多变的工况,适应性更强,附着系数估计值更有效准确。