
四轮驱动电动汽车路面附着系数估计方法.pdf

An****70

1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共40页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

四轮驱动电动汽车路面附着系数估计方法.pdf
一种四轮驱动电动汽车路面附着系数估计方法,属于控制技术领域。本发明的目的是首先提出两种估计策略,设计最终估计器将二者综合,获取方法一利用附着系数在均值以上的点,代入方法二,获取准确有效的路面附着系数估计信息的四轮驱动电动汽车路面附着系数估计方法。本发明步骤是:基于公式法的路面附着系数估计,基于公式变形的路面附着系数估计,算法融合。本发明使估计方法更能应用于复杂多变的工况,适应性更强,附着系数估计值更有效准确。
四轮独立驱动电动汽车路面附着系数的估计方法.pdf
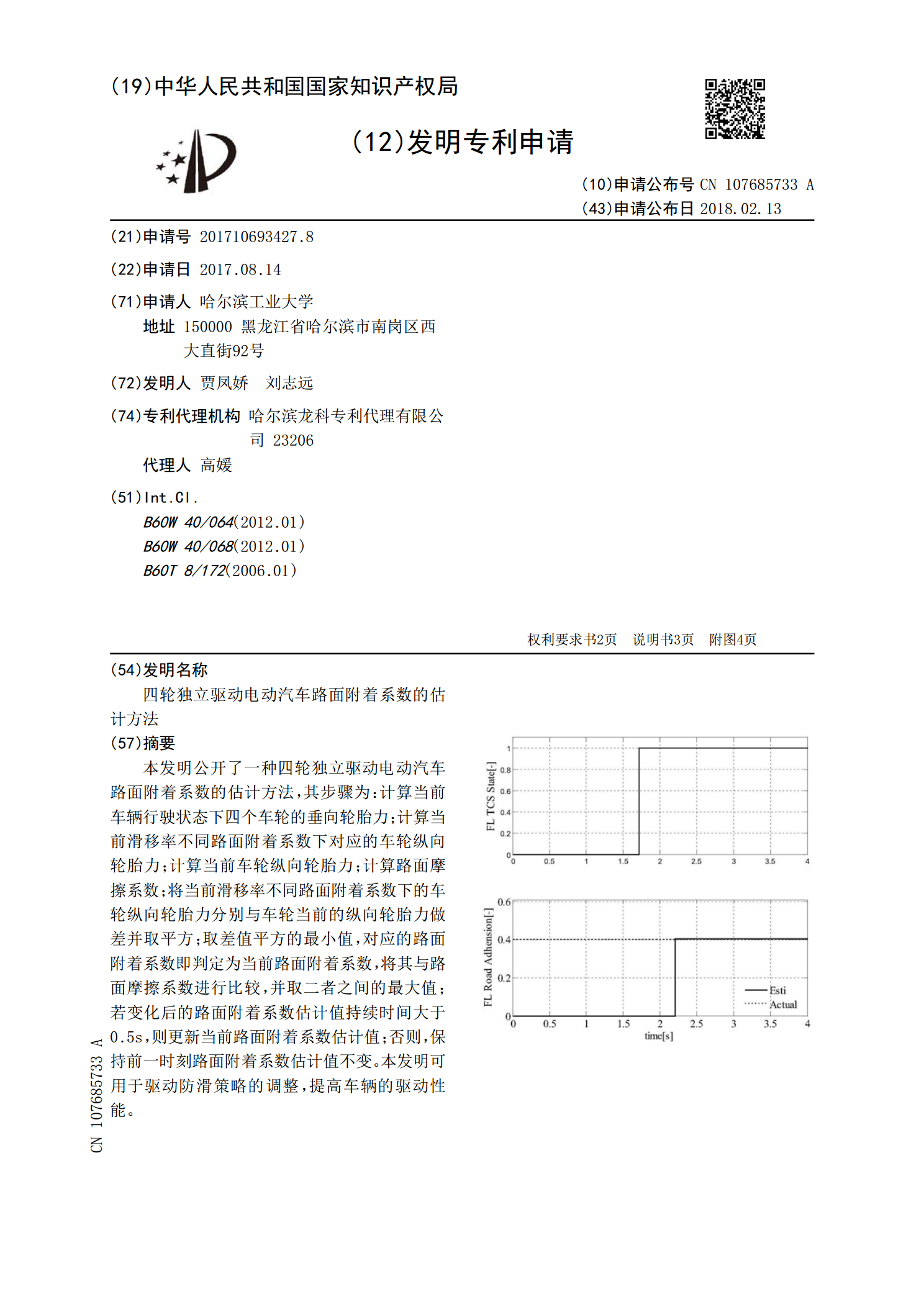
本发明公开了一种四轮独立驱动电动汽车路面附着系数的估计方法,其步骤为:计算当前车辆行驶状态下四个车轮的垂向轮胎力;计算当前滑移率不同路面附着系数下对应的车轮纵向轮胎力;计算当前车轮纵向轮胎力;计算路面摩擦系数;将当前滑移率不同路面附着系数下的车轮纵向轮胎力分别与车轮当前的纵向轮胎力做差并取平方;取差值平方的最小值,对应的路面附着系数即判定为当前路面附着系数,将其与路面摩擦系数进行比较,并取二者之间的最大值;若变化后的路面附着系数估计值持续时间大于0.5s,则更新当前路面附着系数估计值;否则,保持前一时刻路

基于四驱电动汽车的路面附着系数估计方法研究的综述报告.docx
基于四驱电动汽车的路面附着系数估计方法研究的综述报告随着新能源汽车越来越普及,电动四驱汽车成为了人们购买的热点之一。对于电动四驱汽车而言,路面附着系数的估计显得尤为重要。因为它不仅与车辆的行驶性能和安全性有密切关系,而且也涉及到车辆的能耗以及车辆对道路的损伤等问题。故而,基于四驱电动汽车的路面附着系数估计方法研究具有重要的意义。目前国内外的研究方法主要有基于传感器的路面附着系数估计方法、基于车辆动力学模型的路面附着系数估计方法和基于数据驱动的路面附着系数估计方法。首先是基于传感器的路面附着系数估计方法。这

基于四驱电动汽车的路面附着系数估计方法研究的中期报告.docx
基于四驱电动汽车的路面附着系数估计方法研究的中期报告摘要:本中期报告研究了基于四驱电动汽车的路面附着系数估计方法。首先,介绍了路面附着系数的概念及其对汽车性能的影响。然后,分析了目前常用的路面附着系数检测方法,指出它们存在的一些局限性。在此基础上,本报告提出了一种基于四驱电动汽车的路面附着系数估计方法,该方法利用车轮速度差信息和车辆动力学模型,通过卡尔曼滤波器实现路面附着系数的实时估计。最后,本报告对该方法的测试结果进行了初步分析,结果表明该方法能够准确估计路面附着系数。关键词:四驱电动汽车;路面附着系数

基于分布式驱动电动汽车的路面附着系数估计.docx
基于分布式驱动电动汽车的路面附着系数估计标题:基于分布式驱动电动汽车的路面附着系数估计摘要:随着电动汽车的快速发展,对电动汽车驱动性能的研究日益受到关注。路面附着系数是衡量汽车在路面上的牵引能力和操控稳定性的重要参数。本文提出了一种基于分布式驱动电动汽车的路面附着系数估计方法,并对其进行了详细描述和分析。1.引言随着环境污染和能源压力的增加,电动汽车已成为解决能源和环境问题的重要选择。然而,电动汽车与传统汽车在驱动性能上存在一些差异,其中一个关键差异就是路面附着系数的影响。路面附着系数的准确估计对于电动汽